XiaoMi-AI文件搜索系统
World File Search SystemIFAC

风险感知:航空安全的关键要素
*** 圣何塞州立大学/NASA 艾姆斯研究中心 “归根结底,冒险是几乎所有事故的根源。但要找到那些冒险的人并不总是那么容易;他们常常与冒险的人混淆。”(Wagenaar 和 Keren,1986)摘要:新自动化系统的设计人员通常会进行人为可靠性分析,以解释可能导致系统风险的潜在人为错误。在航空业,美国国家运输安全委员会 (1994) 发现事故中第二大常见错误类型是战术决策错误。提高飞行安全性的努力经常涉及对机组人员进行有效决策的培训。在开展此类培训时,一个显而易见的事实是,决策在很大程度上取决于机组人员对环境中各种威胁所带来的风险的认知。本文讨论了两个对提高航空决策质量至关重要的问题。(1) 机组人员如何看待与航空决策相关的风险?(2) 风险认知如何影响机组人员的决策过程?本文将介绍解决这些问题的研究结果,以及对改善机组人员决策的影响。版权所有 2002 IFAC。关键词:决策、人为错误、风险、社会技术系统、安全分析、系统设计、人为可靠性、不确定性、小组工作、飞机运营 1。简介 在设计新的自动化系统时,工程师总是关注评估潜在风险,以确定零部件随时间发生故障的可能性。根据这些评估,他们寻求减轻这些潜在风险的方法。一项更为困难的任务是将人类操作员的作用考虑在内,即使风险评估旨在预测人为错误的可能性。通常,人为可靠性分析会产生一个概率,该概率会被输入到更广泛的方程中,但这些风险估计通常基于专家判断,而不是实际经验。此外,这些努力对于理解人为错误发生的方式和原因几乎没有提供指导,也没有

人工智能与小型审计
公司之间可以根据其需求、目标和现有基础设施进行选择。审计是对公司财务和非财务信息以及负责记录和汇总这些信息的系统和流程的可靠性和可信度的评估。这涉及对公司的财务交易和流程进行各种测试、与管理层访谈、收集证据以证实报表和账户状态以及对资产价值进行实物验证。审计师是公司任命执行此类审计的个人或公司。目的是就公司财务报表是否不存在因欺诈或错误导致的重大错报得出意见。该意见在公司年度报告中的审计师声明中表达。目前,审计服务市场价值为 2150 亿美元,预计到 2028 年将增长到 2950 亿美元(VMR 2021)。许多研究人员预测,人工智能可能会使审计师的工作更加高效、更具成本效益,并提高审计质量(ICAEW 2018;Kokina 和 Davenport 2017;Raphael 2015)。已经有研究对审计师的技术接受度和审计公司中的技术传播进行了研究,但没有研究专门关注审计师对人工智能的采用。学术界和大众媒体中提到的许多应用都关注专家使用的大数据集和大型组织背景下的特定人工智能技术。中小企业 (SME)1 对经济增长和就业至关重要。在许多经济体中,中小企业占所有公司的 90% 以上,创造了大多数新的就业机会(Mohsin 2022)。因此,在许多这样的经济体中,中小企业在审计公司的客户组合中占比较大的比例。最近,审计师看到了更多对质量控制、遵守新标准以及对审计师与中小企业合作进行更全面监督的要求。审计行业的这种演变使中小企业审计更加耗时、成本更高,同时也增加了审计风险(IFAC 2018)。因此,协调、标准化和自动化可以成为优化审计师工作和降低中小企业审计成本的解决方案(AICPA 2015;Basuony 等人 2017;Sutton、Holt 和 Arnold 2016)。基于可用数据和信息的欺诈检测是审计师在审计中小企业时关注的一个例子。此类工作的可用数据包括组织的年度报告、银行交易记录、发票、合同、会议记录和其他可用的组织活动文件。这些大多以数字形式提供,但许多中小企业仍然仅依赖印刷材料。因此,可能产生潜在影响的主要操作是
2013-2014 年度报告 - 普渡大学工程学院
Anil Bajaj 非线性动力学杂志特约编辑 Stuart Bolton 噪声控制工程杂志顾问委员会成员 噪声控制工程研究所出版副总裁,(2011 - 2013) 噪声控制工程研究所 - 董事会成员 噪声控制工程研究所 - InterNoise 2015 - INCE/KSNVE 联络人 Noise-Con 2013 技术程序委员会 Jim Braun 建筑性能模拟杂志编委会 建筑模拟:国际杂志编委会 普渡大学 2014 年国际制冷与空调会议主席 David Cappelleri IEEE 机器人与自动化协会微/纳米机器人与自动化技术委员会成员 IEEE 机器人与自动化机制与设计技术委员会成员 ASME 设计工程分部机制与机器人委员会成员 ASME 设计工程分部微纳米系统技术委员会成员 微生物机器人杂志副主编,2012 年至今 IEEE 国际机器人与自动化会议副主编(ICRA),2013、2015 主席,教程/研讨会,ASME 国际设计工程技术会议和计算机与工程信息会议,2014、2015 联合组织者,IEEE RAS MNRA 移动微机器人挑战赛,2013-至今 研讨会组织者,ASME 国际设计工程技术会议、微纳米系统会议、微纳米机制和机器人,2010-至今 特别会议主席,第 12 届 IEEE 自动化科学与工程会议,2016。程序主席,第 10 届微纳米系统国际会议,ASME 国际。设计工程技术会议,2016 年。 陈岩 迦南公司顾问,2012 年 建筑与环境(BAE)杂志主编 香港理工大学屋宇设备学系学术顾问 香港大学教育资助委员会工程研究评估小组成员,2014 年 亚琛工业大学 E.oN 工程研究中心科学顾问委员会成员 《可持续城市与社会》杂志编委会成员 邱乔治 美国成像科学与技术学会(IS&T)研究员 美国机械工程师学会(ASME)研究员 美国电气电子工程师学会(IEEE)会员 ASME 动态系统与控制部门执行委员会主席,2012 年至今 国际自动控制联合会 (IFAC) 机电系统技术委员会成员,2005 年至今 ASME 动态系统与控制部门执行委员会成员,2010-2012 年 《成像科学与技术杂志》编辑技术,2012 年至今 《机械工程前沿》编辑委员会成员,2008 年至今 《控制工程实践杂志》副主编,2007 年至今 《控制工程实践杂志》程序主席,2016 年美国控制会议,马萨诸塞州波士顿,2016 年 6 月
B.Sc. (植物学)教学大纲应用科学学院 2021 有关负责消费和生产的报告 b-tech(Phytopharmaceuticals)2022-2023 根据BSMA,ICAR M.Sc. ... IFAC赞助了三天通过无人机飞行和电动汽车的控制系统工程奇观的国家研讨会 2024-25 B.Sc. (动物学)教学大纲应用科学学院 课程结构和教学大纲B.Sc.(荣誉)... PG学位计划教学大纲,根据BSMA,ICAR 研究出版物和道德资源的研讨会...
微生物世界简介模块:微生物营养,生长和代谢。病毒在疫苗生产,研究,医学和诊断中的作用,作为植物疾病的因果生物的经济重要性。细菌在其在农业和工业中的作用(发酵和医学)的经济意义。模块-II病毒:发现,生理化学和生物学特征;分类(巴尔的摩),一般结构,与病毒和王室的特殊参考;复制(一般帐户),DNA病毒(T-Phage),裂解和溶菌循环; RNA病毒(TMV)。练习:1。裂解和溶血周期的线图/照片2。 div>电子显微照片/病毒模型 - T-Phage and TMV,模块-IIII细菌:发现,一般特征;类型-Archaebacteria,Eubacteria,无壁形形式(支原体和球体体);细胞结构;营养类型;繁殖 - 植被,无性和重组(共轭,转化和转导)。练习:3。细菌的电子显微照片,二进制裂变,结合内孢子,根结节4。革兰氏染色。 5.孔雀石绿(从土壤细菌中取出的内孢子)染色。 6。 根结节细菌的研究革兰氏染色。5.孔雀石绿(从土壤细菌中取出的内孢子)染色。6。根结节细菌的研究
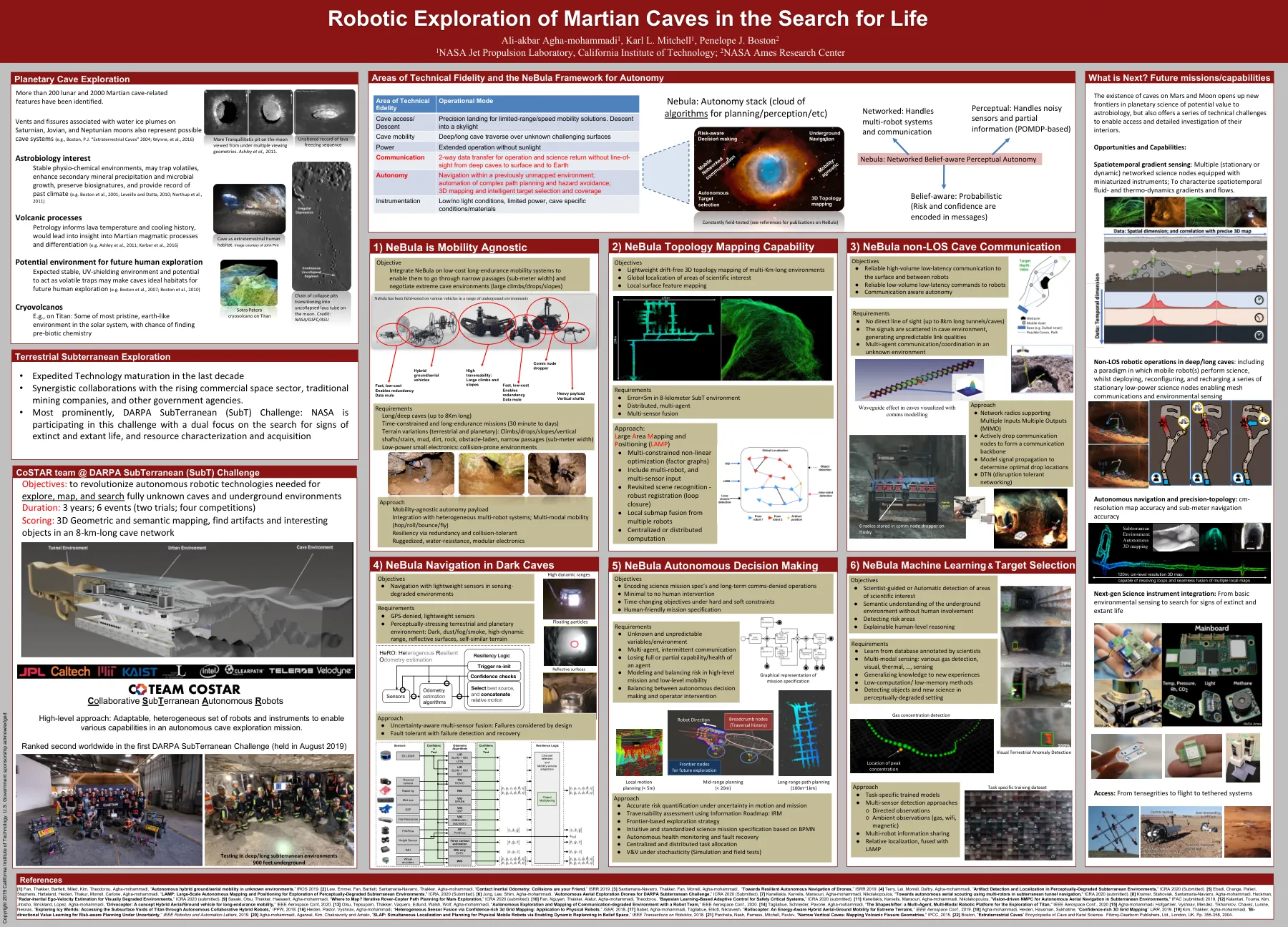
机器人探索火星洞穴寻找生命
[1] Fan,Thakker,Bartlett,Miled,Kim,Theodorou,Agha-Mohammadi,“自动杂种地面/未知环境中的空中移动性”,IROS 2019。[2] Lew,Emmei,Fan,Bartlett,Santamaria-Navarro,Thakker,Agha-Mohammadi,“接触惯性探测:碰撞是您的朋友,” ISRR2019。[3] Santamaria-Navarro,Thakker,Fan,Morrell,Agha-Mohammadi,“迈向无人机的弹性自动导航”,ISRR2019。[4] Terry,Lei,Morrell,Daftry,Agha-Mohammadi,“感知衰落的地下环境中的伪影检测和定位”,ICRA 2020(提交)。[5] Ebadi,Change,Palieri,Stephens,Hatteland,Heiden,Thakur,Morrell,Carlone,Carlone,Agha-Mohammadi。“灯:大规模的自主映射和定位,用于探索感知衰落的地下环境,” ICRA,2020年(提交)。[6] Jung,Lee,Shim,Agha-Mohammadi,“ DARPA地下挑战的自动空中勘探无人机”,ICRA 2020年(提交)。[7] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下隧道导航中使用多旋转器使用多旋翼的自主空中搜寻”,ICRA 2020(提交)。[8] Kramer,Stahoviak,Santamaria-Navarro,Agha-Mohammadi,Heckman,“视觉上降解环境的雷达惯性自我效率估计”,ICRA 2020(提交)。[9] Sasaki,Otsu,Thakker,Haesaert,Agha-Mohammadi,“在哪里映射?迭代的漫游者 - 弯曲器路径计划火星探索,” ICRA 2020(提交)。[10] Fan,Nguyen,Thakker,Alatur,Agha-Mohammadi,Theodorou。“基于贝叶斯学习的自适应控制对安全关键系统的自适应控制”,ICRA 2020(提交)。[11] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下环境中进行自主空中航行的视觉驱动的NMPC,IFAC(提交),[12],[12] [12]长期耐药性活动的概念混合空中/地面车辆。[13] Otsu,Tepsuporn,Thakker,Vaquero,Edlund,Walsh,Walf,Wolf,Agha-Mohammadi,“与机器人团队对贫困环境的自动探索和映射”[14] Tagliabue, Schneider, Pavone, Agha-mohammadi, “ The Shapeshifter: a Multi-Agent, Multi-Modal Robotic Platform for the Exploration of Titan, " IEEE Aerospace Conf., 2020 [15] Agha-mohammadi, Hofgartner, Vyshnav, Mendez, Tikhomirov, Chavez, Lunine, Nesnas, “探索冰冷的世界:通过自动协作混合机器人访问泰坦的地下空隙,” IPPW,2018。[16] Heiden,牧师,Vyshnav,Agha-Mohammadi,“通过置信度丰富的3D网格映射:应用于物理机器人的异质传感器融合:Iser,2018年。[17] SABET,AGHA-MOHAMMADI,TAGLIABUE,ELLIOTT,NIKRAVESH,“滚筒式:能源吸引能量的混合杂种空中地形迁移率对极端地形”,IEEE Aerospace Conf。,2019年。[18] Agha-Mohammadi,Heiden,Hausman,Sukhatme,“信心丰富的3D网格映射” IJRR,2019年。[19] Kim,Thakker,Agha-Mohammadi,“不确定性下的风险感知计划的双向价值学习”,IEEE机器人和自动化信,2019年。[21] Parcheta,Nash,Parness,Mitchell,Pavlov,“狭窄的垂直洞穴:映射火山裂缝几何形状”,IPCC,2015年。pp。[20] Agha-Mohammadi,Agarwal,Kim,Chakravorty和Amato,“ Slap:通过在信仰空间中启用动态重建的物理移动机器人的同时本地化和计划,”机器人技术的IEEE Transactions,2018。[22]波士顿,“洞穴和喀斯特科学的百科全书”。Fitzroy-Dearborn Publishers,Ltd。,英国伦敦。355-358,2004。