XiaoMi-AI文件搜索系统
World File Search SystemIFR
DYNONCERTIFIED.COM - Dynon 航空电子设备
Dynon 认证面板采用 SkyView HDX,这是 Dynon 的旗舰集成航空电子平台,可用现代、经济实惠的系统取代您的旧设备。SkyView HDX 可以做到一切:带合成视觉和攻角的主飞行显示器;三轴自动驾驶仪;带所有 EGT/CHT、倾斜辅助、燃油计算机和多引擎支持的发动机监视器;带飞行计划、ADS-B 交通和天气以及电子飞行包的地图;COM 无线电;带 2020 兼容 ADS-B Out 的模式 S 应答器等。SkyView HDX 的卓越触摸屏与符合人体工程学的旋钮和按钮配合使用,可在所有飞行条件下提供积极、直观的控制。安装 SkyView HDX 系统允许在 VFR 和 IFR 中飞行(配备适当的第三方导航器时),并且不会限制飞机的操作使用。
埃及航空 990 号航班,1999 年 10 月 31 日 - NTSB
1999 年 10 月 31 日,美国东部标准时间 (EST) 约 0152 时,埃及航空 990 号航班,一架波音 767-366ER (767),SU-GAP,在马萨诸塞州楠塔基特以南约 60 英里处坠毁于大西洋。埃及航空 990 号航班根据埃及民航条例 (ECAR) 第 121 部分和美国联邦法规第 14 部分第 129 部分的规定运营,是一架定期国际航班,从纽约约翰肯尼迪国际机场 (JFK) 飞往埃及开罗开罗国际机场。1 该航班于 0120 时左右从肯尼迪国际机场起飞,机上有 4 名机组人员、10 名乘务员和 203 名乘客。机上 217 人全部遇难,飞机被毁。航班按照仪表飞行规则 (IFR) 飞行计划飞行,目视气象条件良好。
数字飞行对自动驾驶飞机操作的适用性...
无人驾驶飞机系统 (UAS) 为新时代的专业任务带来了巨大希望,包括个人空中交通、货运飞行操作、航空勘测、检查、消防等。预期的市场增长是巨大的。要释放其可扩展性和现有优势,需要一个人同时监督多个航班,专注于多飞行器任务管理,并将其在控制飞机飞行路径方面的主动作用移交给自主系统。实现这些可扩展性优势的关键是最低限度地访问国家空域系统 (NAS),这对自动驾驶 UAS 飞机操作提出了一些独特的挑战。这些包括与现有空域结构和操作兼容的要求,包括目视飞行规则 (VFR) 和仪表飞行规则 (IFR),这两者都不是为满足 UAS 的独特需求和能力而开发的。

AA965 卡利事故报告 - SKYbrary
1995 年 12 月 20 日东部标准时间 (est) [l] 21:42,美国航空公司 965 航班 (AA965),一架波音 757-223,N651AA,从美国佛罗里达州迈阿密国际机场 (MIA) 飞往哥伦比亚卡利的阿方索·博尼利亚·阿拉贡国际机场 (SKCL),按照仪表飞行规则 (IFR) 运行,在目视气象条件 (VMC) 下从巡航高度下降时坠毁在山区。事故地点位于布加镇附近,位于卡利 VOR [2] (CLO) 东北 33 英里处。飞机坠毁在平均海平面 (msl) 约 8,900 英尺处,靠近 El Deluvio 山顶,距离 W3 航路以东约 10 英里。机上共有 155 名乘客、2 名机组人员和 6 名乘务员,其中 4 名乘客在事故中幸存。

LFMP - 佩皮尼昂里韦萨尔特 - DIRCAM
北通用航空停机坪处过桥设 K 型跑道。K 型跑道宽度:从 C 处为 23 米,至桥后为 110 米。北通用航空停车场桥上的 TWY K。 K 路基宽度从 C 处开始为 23 米,至桥后为 110 米。 TWY D 禁止 MTOW > 5.7 吨的 ACFT 使用。对于 MTOW > 5.7 吨的 ACFT,禁止 TWY D。 TWY F 和 P 因 ACFT 地面行动而关闭。 F 和 P 高速公路禁止飞机通行。 TWY L: TWY L: - 禁止翼展大于或等于 52 米和/或主起落架总宽度大于或等于 14 米的 ACFT 飞行, - 禁止翼展大于或等于 52 米和/或主起落架总宽度大于或等于 14 米的飞机飞行, - - 在 15/33 跑道上进行 IFR 交通时,禁止翼展大于 46 米的飞机飞行。如果在 15/33 跑道上进行 IFR 交通,则禁止翼展 > 46 米的 ACFT 使用。 THR 15:半转弯限制于类别低于或等于“代码 C”的 ACFT,并且仅当 TWY A 不能使用时。阈值 15:掉头仅限于小于或等于“代码 C”类别的飞机,并且仅当 TWY A 不可用时才可以。 THR 33:半转区域。阈值 33:掉头区域。跑道 15/33 的缩短路肩位于跑道 D 和跑道入口 15 之间。跑道 15/33 的缩短路肩位于跑道 D 和跑道入口 15 之间。跑道 C、D、K、U、P 的缩短路肩:中速滑行。 C、D、K、U、P 路段路肩较窄:以中速行驶。在 TWY U 上,由于运营原因,跑道义务标志之间的距离比正常情况下要大。在 TWY U 上,由于运营原因,跑道义务标志之间的间距大于标准。
NextGen - 联邦航空管理局
• ADS-B 用于控制墨西哥湾等雷达监视有限的区域的交通。由于对流天气或不利逆风,使用特殊 ADS-B 航线飞越墨西哥湾的航班平均可节省 7-11 分钟的飞行时间并减少燃料消耗。与使用传统陆地区域导航航线的航班相比,这可以节省资金并减少飞机废气排放。为墨西哥湾石油平台提供服务的配备 ADS-B 的直升机可以在空中交通管制下在目视和仪表气象条件下飞行。ADS-B 允许正确配备的直升机直接获得航线许可。这样可以缩短约 14 海里的航程,并为每个仪表飞行规则 (IFR) 飞行计划节省约 14 加仑的燃料。美国联邦航空管理局估计,从 2009 年 12 月到 2017 年 6 月,航班节省了约 750,000 海里。
押韵,押韵,不要走开
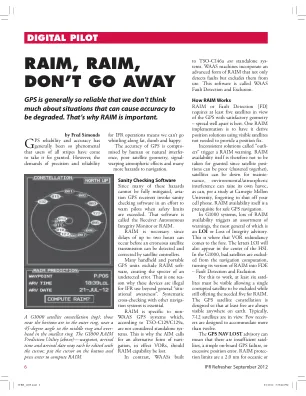
健全性检查软件由于许多此类危害无法完全缓解,航空 GPS 接收器会调用健全性检查软件,在超出安全限制时向飞行员发出警告。该软件称为接收器自主完整性监视器或 RAIM。RAIM 是必需的,因为在卫星控制器检测和纠正错误的卫星传输之前可能会发生长达两个小时的延迟。许多手持和便携式 GPS 设备不包含 RAIM 软件,从而造成未检测到错误的阴影。这就是为什么这些设备除了一般的“态势感知”之外,不得用于 IFR 使用的原因之一。必须与其他导航系统进行系统性交叉检查。RAIM 特定于非 WAAS GPS 系统,根据 TSO-C129/C129a,这些系统不被视为独立系统。这就是为什么 AIM 呼吁在 RAIM 功能丧失时采用替代导航方式(实际上是 VOR)的原因。相比之下,WAAS 的
附录 H 航空信息... - SKYbrary
由欧洲空中导航安全组织制定并由欧洲委员会 (2010 年 1 月) 通过的航空数据和信息质量 (adQ ir) 实施规则现称为委员会条例 (Eu) 第 73/2010 号。该条例规定了单一欧洲天空的航空数据和信息质量要求,包括准确性、分辨率、完整性和及时性。实际范围超出了 anSps/aiSps,包括非 anSp 实体。就范围而言,航空数据/信息处理链从原始数据源(例如测量员、程序设计者、ad 等)延伸到 aiS(出版物)再到最终用户(无论是人类用户还是航空应用程序)。对于 ad 运营商,它适用于已在国家 aip 中发布 ifr 或 Special-vfr 程序的机场,因为此类程序对数据质量有更高的要求。
EC135 设计中的航空力学方面
图 1 显示了 EC135。该飞机实现了飞机结构和先进技术部件的最佳组合。其中最重要的项目是: 具有蛤壳门和单层地板的后装载能力 混合机身结构(复合材料、金属板) 具有长时间空运行能力的铝合金 MGB 被动隔振系统 [1] 自动控制的可变旋翼速度 [2] 具有数字电子发动机控制(FADEC)的双发动机配置 [3] 在 Turbomeca Arrius 2B(1)和 Pratt & Whitney PW 206 B 发动机之间进行选择 偏航 SAS(单缸)用于 VFR 操作,计划进行双/单飞行员 IFR 认证 [4] 具有高可见度的驾驶舱布局 现代 MMI 技术(Avionique Nouvelle) 无轴承主旋翼系统 具有抛物线叶尖和先进 DM-H3/H4 翼型的复合材料叶片 带不等距叶片的扇翼尾桨(Fenestron) [5]
多年来,经过认证的飞机的飞行员... - Dynon Avionics
Dynon 认证面板采用 SkyView HDX,这是 Dynon 的旗舰集成航空电子平台,可用现代、经济实惠的系统取代您的旧设备。SkyView HDX 可以做到这一切:带有合成视觉和攻角的主飞行显示器;三轴自动驾驶仪;带有所有 EGT/CHT、倾斜辅助、燃油计算机和多引擎支持的发动机监视器;带有飞行计划、ADS-B 交通和天气以及电子飞行包的地图;COM 无线电;带有符合 2020 年标准的 ADS-B Out 的模式 S 应答器等。SkyView HDX 的卓越触摸屏与符合人体工程学的旋钮和按钮配合使用,可在所有飞行条件下提供积极、直观的控制。安装 SkyView HDX 系统允许在 VFR 和 IFR 中飞行(配备适当的第三方导航器时),并且不会限制飞机的操作使用。