XiaoMi-AI文件搜索系统
World File Search SystemIMU

RoboSub 2024技术设计报告
摘要 - 今年,由中学和高中学生组成的团队Inspion的新团队正在建立未来几年的STEM管道。凭借更少的机器人经验,该团队利用过去的课程和能力,并将部署更有能力的自动驾驶水下汽车(AUV)Onyx来执行任务,而较小的AUVGræy,Græy,正在用作测试台,并且有推动者可以展示Intersub交流。团队集成了一个新的光纤陀螺仪(FOG)和多普勒速度日志(DVL)算法,该算法与水力机,摄像头和一个机上惯性测量单元(IMU)相结合,可实现更准确的导航。团队继续改善软件,并结合了更强大的本地化算法。团队的开源Robosub 101指南[1]已更新以加速和文档学习作为全球新RoboSub参与者的参考文献文档。
在尘土飞扬的工业环境中自动引导车辆的高精度视觉定位系统
摘要确保方便而准确的本地化解决方案是无线评估的工业场景中的基本问题。因此,在这项研究中,提出了带有光发射二极管(LED)阵列目标的局部ization系统,以自动引导车辆(AGV)导航。可见目标进行校准,并可以使用查看LED目标的相机计算姿势。引入了一种新颖的数据滤波方法,该方法将里程表数据和惯性测量单元(IMU)数据与视力数据进行了集成,以提供稳定且ACCU速率的定位。在5米长的AGV上测试了视力定位系统,结果表明,所提出的系统在6 mm处获得静态位置精度,运动位置的精度为10 mm,角度精度为0.052°,这比工业AGV应用中使用的其他方法更为精确。

UConn电气和计算机工程秋季2024
无人驾驶汽车(无人机)通常称为无人机,彻底改变了各种行业。该项目中解决的问题涉及开发可靠的无人机,能够携带不同的传感器组合,同时为潜在的传感器集成提供各种不同的功率和通信接口。项目完成后,团队创建了如此小的UAS多旋翼,它将允许快速整合和更改不同的传感器,包括电光和红外摄像机,各种COTS IMU组件,LIDAR,LIDAR,RADAR等。该车辆设计为配备一台能够用7磅传感器飞行超过15分钟的单板计算机。该平台还具有一个通用的机械安装接口,位于车辆周围的几个位置,并将露出传感器的多个通信接口,以便可以在磁场中轻松更改传感器。

RIEGL 波形激光雷达技术的进步和...
Waveform-LiDAR 利用了两个关键特性:首先,脉冲飞行时间激光雷达的返回信号(从光学状态转换为电状态后)通过高采样率的模数转换器 (ADC) 进行数字化,同时覆盖宽动态范围。其次,数字化的回波信号会进行详细分析(信号检测和信号估计)——在线或离线——提供功能丰富的测距结果,包括目标的精确距离、信号强度以及从接收到的回波信号的实际形状得出的属性。结合角度测量和运动激光雷达应用中集成 IMU/GNSS 系统的测量,生成的 3D 点云不仅具有几何形状,还具有经过校准的附加属性,如振幅和反射率估计,从而简化了进一步的处理,如配准、地理参考和过滤。

BNO086 开发套件
我们的超低功耗 IP 包括由专用 DSP 和 AI 以及其他类型的加速器组成的综合平台,适用于低功耗工作负载,包括 5G 基带处理、智能视觉、语音识别、物理层处理和传感器融合。我们还提供针对 5G RAN 和 Open RAN、Wi-Fi 企业和住宅接入点、卫星通信和其他多千兆位通信的高性能 DSP。我们的产品组合还包括针对我们的处理器优化的广泛应用软件,包括语音前端处理和语音识别、成像和计算机视觉以及传感器融合。对于传感器融合,我们的 Hillcrest Labs 传感器处理技术为 AR/VR、机器人、遥控器和物联网提供了广泛的传感器融合软件和惯性测量单元(“IMU”)解决方案。对于无线物联网,我们提供业界最广泛采用的蓝牙(低功耗和双模)、Wi-Fi 4/5/6(802.11n/ac/ax)和 NB-IoT IP。

采用传感器融合技术确定飞机姿态和位置信息
图 3.11:GPS 与垂直陀螺仪姿态.................................................................................... 41 图 3.12:GPS 与垂直陀螺仪姿态.................................................................................... 41 图 3.13:卡尔曼滤波器序列...................................................................................... 42 图 3.14:卡尔曼滤波器状态和协方差矩阵的进展....................................................... 46 图 3.15:扩展卡尔曼滤波器 (EKF) 序列.................................................................... 47 图 4.1:YF-22 机载计算机 2.................................................................................... 52 图 4.2:NovAtel GPS.................................................................................................... 53 图 4.3:Goodrich Systems 垂直陀螺仪.................................................................... 54 图 4.4:IMU 与 GPS 测量获取率............................................................................. 55 图 4.5:GPS 位置(放大)..................................................................................... 57 图 4.6:GPS 位置 -瞬时信号丢失................................................................................ 57 图 4.7:方差计算的稳定状态时间段.................................................... 59 图 4.8:GPS 辅助 INS/垂直陀螺仪框图.................................................... 61 图 4.9:滤波处理序列....................................
PIN-SLAM:LIDAR使用基于点的隐式神经表示来实现全球地图一致性
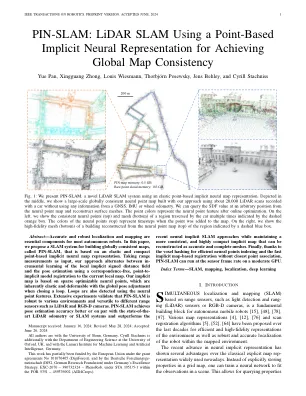
图1:我们使用基于弹性点的隐式神经图表示,这是一种新型的LIDAR SLAM系统。在中间描绘的是,我们使用大约20,000个带有汽车记录的LiDAR扫描的大规模全球一致的神经点图,而无需使用GNSS,IMU或车轮频能计的任何信息。我们可以从神经点图和重建表面网格的任意位置查询SDF值。点颜色表示在线优化后的神经点功能。在左侧,我们显示了一致的神经点(顶部)和网眼(底部),该区域多次由沿线橙色盒子指示的汽车穿过。当添加到地图中时,神经点(顶部)的颜色表示时间步。在右侧,我们显示了从一个用虚线的蓝色盒子指示的区域的神经点图(顶部)重建的建筑物的高层网格(底部)。

单腿康复外骨骼的基于无线PID的控制
摘要:对远程康复的需求正在增加,为病人和老年人开放了方便有效的家庭疗法。在这项研究中,我们使用任何人模拟来分析肌肉活动并确定设计康复外骨骼的关键参数,并选择合适的运动扭矩以在康复过程中帮助患者。外骨骼的设计具有PID控制机制,用于精确管理运动位置和关节扭矩,并且以自动化和远程操作模式运行。髋关节和膝盖运动,从而实现实时反馈。蓝牙通信可确保在各种培训场景中无缝控制。我们的研究表明,可以有效地实施远程控制的康复系统,不仅在全球健康危机(例如大流行)等全球卫生危机期间,还提供了重要的支持,还可以改善遥远或服务不足的地区的康复服务的可及性。这种方法有可能改变物理治疗的方式,从而使其更容易获得,并适应较大的患者人群的需求。

LEO卫星轨道轨道通过闭环机器学习,并应用于机会性导航
摘要 - 提出了通过闭环机器学习的低地球轨道(LEO)卫星轨道预测的框架。通过改进地面车辆的导航,与使用简化的一般扰动4(SGP4)Orbit Orbit Expagator相比,使用“非合作” LEO卫星信号来证明该框架的功效,并通过“非合作” LEO卫星信号导航。该框架称为LEO-NNPON(具有机会性导航的NN预测),假定以下三个阶段。(i)LEO卫星第一通过(跟踪):具有其位置提取物测量值的陆地接收器(伪造,载波相位和/或多普勒)从接收到的Leo卫星的信号中,使其能够估算到达的时间。LEO卫星的状态用SGP4传播的两行元素(TLE)数据初始化,随后在卫星可见性期间通过扩展的Kalman滤波器(EKF)估算。(ii)未观察的LEO卫星(预测):在估计的ephemerides上对具有外源输入(NARX)NN的非线性自回归进行了训练,并用于传播Leo卫星的轨道,以期在此期间不观察卫星。(iii)LEO卫星第二通道(导航):配备LEO接收器的地面导航器(例如,车辆),从Leo卫星的下链路信号中提取导航可观察到可观察到的可观察到的可观察到的可观察到的导航器。这些导航可观察物用于以紧密耦合的方式(例如,通过EKF)以紧密耦合的方式帮助导航器安装的惯性测量单元(IMU)。LEO卫星状态是从NN预测的胚层获得的。提出了装有工业级IMU导航4.05 km的地面车辆的实验结果,并提供了来自两个Orbcomm卫星的信号。比较了三个车辆导航框架,所有车辆导航框架都用全球导航卫星系统(GNSS) - 惯性导航系统(INS)位置和速度解决方案进行初始化。 (ii)使用SGP4传播的Leo Esphemerides的Leo-Aided Ins; (iii)与狮子座的狮子座。独立的三维(3-D)位置根平方(RMSE)为1,865 m,而SGP4的Leo Aided INS为175.5 m。 Leo-Nnpon的Leo Aided Ins为18.3 m,证明了拟议框架的功效。

提高移动激光扫描仪的定位精度...
在GPS正常工作条件下,MLS系统可以达到厘米级的定位精度。然而,在无GPS环境下,由于MLS的观测模式误差和视轴对准误差无法通过GPS信号进行标定或修正,定位精度可能降低到分米甚至米级。针对这一研究空白,本文提出一种新技术,适当结合稳健加权最小二乘(RWTLS)和全信息最大似然最优估计(FIMLOE),提高无GPS环境下MLS系统的定位精度。首先,建立MLS系统的坐标转换关系和观测参数向量。其次,利用RWTLS算法对三维点观测模型进行修正;然后利用FIMLOE标定激光扫描仪框架与IMU框架之间的不确定度传播参数向量和视轴对准误差。最后,在室内场景中进行实验研究,以评估所提方法的有效性。实验结果表明,所提方法能够显著提高 MLS 系统在 GPS 拒绝环境中的定位精度。