XiaoMi-AI文件搜索系统
World File Search SystemIMU

微晶体传感器有助于推动人形机器人性能的边界
Westwood Robotics的创始人兼首席执行官Zhang说:“我们在Themis人类机器人上使用3DM-CV7-AHRS传感器体验了无缝的精度配置此IMU(惯性测量单元)是轻而易举的,可确保用户友好的设置过程。与众不同的是它能够以1 kHz令人印象深刻的速度传递可靠数据,这是实时应用的关键因素。是导航复杂的动作还是迅速响应环境变化,3DM-CV7-AHRS传感器会提高我们对Themis的开发和实验的经验,从而在每种交互中提供无与伦比的准确性和响应性。”
CONEXUS® 飞机通信装置型号 200
ACU-200 利用多种无线连接功能,包括:Cat 4 LTE 蜂窝、3G GSM 蜂窝、2G 蜂窝和 433 MHz。这些系统可以直接从 ARINC 429 数据总线接收数据,并使用以太网与航空电子或机外系统进行双向通信。ACU 的机载 IMU 和 GPS 还可以生成有关飞机运动的信息,包括姿态(滚转、俯仰、偏航)、旋转速率、加速度、航向、速度和位置(纬度、经度、高度),从而简化了传统飞机上的一些数据采集挑战。
CONEXUS® 飞机通信装置型号 200
ACU-200 利用多种无线连接功能,包括:Cat 4 LTE 蜂窝、3G GSM 蜂窝、2G 蜂窝和 433 MHz。这些系统可以直接从 ARINC 429 数据总线接收数据,并使用以太网与航空电子或机外系统进行双向通信。ACU 的机载 IMU 和 GPS 还可以生成有关飞机运动的信息,包括姿态(滚转、俯仰、偏航)、旋转速率、加速度、航向、速度和位置(纬度、经度、高度),从而简化了传统飞机上的一些数据采集挑战。

MTi 用户手册 - 测量传感器
Xsens 的 MTi 产品组合目前有 7 个系列成员,功能范围从惯性测量单元 (IMU) 到完全集成的 GPS/INS 解决方案。所有产品都包含 3D 惯性传感器组件(ISA:陀螺仪和加速度计)和 3D 磁力计,可选配气压计和 GNSS 接收器。MTi 产品系列分为两个系列,即 MTi 10 系列和 MTi 100 系列。MTi 10 系列是 Xsens 的入门级型号,具有强大的精度和有限的 IO 选项范围。100 系列是革命性的新型 MEMS IMU、方向和位置传感器模块,提供前所未有的精度和广泛的 IO 接口。所有 MTi 都具有强大的多处理器核心设计,能够以极低的延迟处理滚动、俯仰和偏航,以及输出校准的 3D 线性加速度、转速(陀螺仪)、(地球)磁场和大气压力(仅限 100 系列)数据。MTi-G-700 GPS/INS 还提供 3D 位置和 3D 速度。MTi 接口可直接提供 50 多种不同的输出格式。每种产品的各种输出可在第 4.1 节中找到。本文档描述了所有 7 个 MTi 的使用、基本通信接口和规格。它们的不同之处已明确指出。从机械和软件接口的角度来看,所有产品都设计为可互换。

使用无人机直升机拦截器和传感器放置规划技术的广域监视系统
摘要 本项目提出并描述了由传感器/拦截器放置规划和拦截无人机 (UAV) 直升机组成的广域监视系统的实施。给定一个区域的二维布局,规划系统基于最大覆盖范围和最小成本最佳地放置周界摄像机。该规划系统的一部分包括 Erdem 和 Sclaroff 的径向扫描算法的 MATLAB 实现,用于生成可见性多边形。此外,还针对固定和 PTZ 情况提出了二维摄像机建模。最后,还放置了拦截器以最小化检测事件期间到周界上任何一点的最短路径飞行时间。其次,设计和实施了无人机直升机的基本飞行控制系统。飞行控制系统的主要目标是当操作员握住自动飞行开关时,将直升机悬停在原地。该系统代表了完整航路点导航飞行控制系统的第一步。飞行控制系统基于惯性测量单元 (IMU) 和比例积分微分 (PID) 控制器。该系统使用运行 Windows XP 和其他商用现货 (COTS) 硬件的通用个人计算机 (GPPC) 实现。此设置不同于通常使用定制嵌入式解决方案或微控制器的其他直升机控制系统。实验表明,在给定多种摄像机类型和参数的情况下,传感器放置规划可以在优化成本下针对几个典型区域实现 >90% 的覆盖率。此外,直升机飞行控制系统实验在短飞行时间内实现了悬停成功。但最终结论是,COTS IMU 不足以满足直升机控制系统等高速、高频应用的需求。

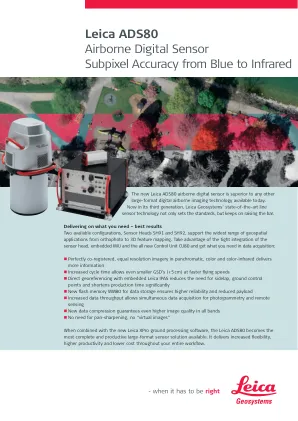
Leica ADS80 机载数字传感器亚像素精度来自...
n 传感器头 SH91 提供等分辨率全色、彩色和彩色红外图像,并允许在全色和彩色中进行立体观察 n 传感器头 SH92 提供等分辨率全色、彩色和彩色红外图像,并允许在从全色到彩色红外的所有波段中进行全立体观察 n 嵌入式 Leica IPAS Freebird 支持多种可互换 IMU n 新型大容量内存 MM80 闪存盘技术简化了数据记录和飞行中数据备份并减少了有效载荷 n 大量图像处理和解释包支持 Leica ADS80 图像

4 ViSig:使用自动解释视觉身体信号...
视觉身体信号是传递特定应用信息的身体姿势。此类信号广泛用于体育(裁判员和裁判员发出信号)、交通运输(海军军官和飞机调度员)和建筑(索具工和起重机操作员发出信号)的快速信息通信,仅举几例。自动解释此类信号有助于在这些行业中保持更安全的运营,有助于记录审计或事故调查目的,并充当体育赛事的记分员。当需要自动化这些信号时,传统上是从观看者的角度通过在摄像机馈送上运行计算机视觉算法来执行。然而,基于计算机视觉的方法在诸如照明变化、遮挡等场景中性能会下降,可能面临分辨率限制,并且安装起来可能很困难。我们的工作 ViSig 打破了传统,而是部署了用于信号解释的人体传感器。我们的主要创新是融合超宽带 (UWB) 传感器(用于捕获身体距离测量)、惯性传感器 (IMU)(用于捕获几个身体部位的方向)和光电二极管(用于手指信号识别),从而实现对信号的稳健解释。通过仅部署少量传感器,我们表明身体信号可以在许多不同的环境中得到明确解释,包括板球、棒球和足球比赛,以及起重机操作和海上导航旗帜信号等操作安全用例,准确率超过 90%。总体而言,我们已经看到了这种方法的巨大前景,并预计未来大量的后续工作将开始使用 UWB 和 IMU 融合模式来解决更一般的人体姿势估计问题。

ViSig:利用身体传感器自动解读视觉身体信号
视觉身体信号是传递特定应用信息的身体姿势。此类信号广泛用于体育(裁判员和裁判员发出信号)、交通运输(海军军官和飞机调度员)和建筑(索具工和起重机操作员发出信号)的快速信息通信,仅举几例。自动解释此类信号有助于在这些行业中保持更安全的运营,有助于记录审计或事故调查目的,并充当体育赛事的记分员。当需要自动化这些信号时,传统上是从观看者的角度通过在摄像机馈送上运行计算机视觉算法来执行。然而,基于计算机视觉的方法在诸如照明变化、遮挡等场景中性能会下降,可能面临分辨率限制,并且安装起来可能具有挑战性。我们的工作 ViSig 打破了传统,而是部署了用于信号解释的人体传感器。我们的主要创新是融合超宽带 (UWB) 传感器(用于捕获身体距离测量)、惯性传感器 (IMU)(用于捕获几个身体部位的方向)和光电二极管(用于手指信号识别),从而实现对信号的稳健解释。通过仅部署少量传感器,我们表明身体信号可以在许多不同的环境中得到明确解释,包括板球、棒球和足球比赛,以及起重机操作和海上导航旗帜信号等操作安全用例,准确率 > 90%。总体而言,我们已经看到了这种方法的巨大前景,并预计未来大量的后续工作将开始使用 UWB 和 IMU 融合模式来解决更一般的人体姿势估计问题。