XiaoMi-AI文件搜索系统
World File Search SystemINFORCE
相信鼻内呼吸道疫苗......
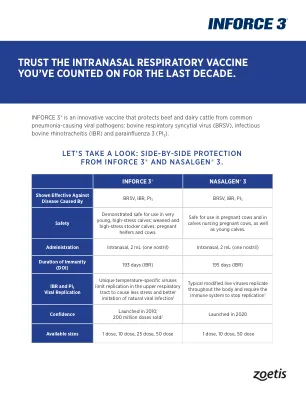
INFORCE 3® 是一种创新疫苗,可保护肉牛和奶牛免受常见肺炎病毒病原体的侵害:牛呼吸道合胞病毒 (BRSV)、传染性牛鼻气管炎 (IBR) 和副流感病毒 3 (PI 3)。
2024 年学生研究案例研究挑战赛 - SuperLife 拯救生命
• Lumaria 上的在线百科全书条目提供有关国家、地理和政治统计数据、人口统计数据、经济统计数据、社会和文化统计数据、其他统计数据、有趣奇闻和主要节日的一般信息;1 • Lumaria 历史通货膨胀和利率,包括通货膨胀、隔夜利率、一年期现货利率和 10 年期现货利率; • Lumaria 普通人群死亡率表; • SuperLife Inforce 数据集包含最近 20 年 20 年期定期和单一保费终身(非分红)产品的政策数据;2 • SuperLife Inforce 数据集的关键;以及 • SuperLife 产品开发团队收集的有关影响死亡率的干预措施的近似成本和影响的研究。3

指数守护策略
• 新发行的合约和有效合约之间的上限可能不同,不同日期和不同年份发行的有效合约之间的上限也可能不同。 • 每个指数期权的上限也可能不同。 • 上限每年在期限开始日期更改,并且永远不会低于最低上限。 • 当前可用的 Index Guard Strategy 指数期权的 -10% 下限不能更改。 • 扣除适用费用和收费的金额可能会导致本金或之前获得的绩效积分损失,并且不会在下一个期限结束日期获得绩效积分。 • 投资于指数策略的金额必须持有整个期限,然后才能获得绩效积分。 如果在期限结束日期之前,您全部或部分提款、年金化合同、执行绩效锁定、支付死亡抚恤金或扣除合同费用和开支,则将应用每日调整。 每日调整可能会导致您损失本金和之前的收入,即使当天的指数表现为正值或自期限开始日期以来一直为正值。

指数精准策略
• 新发行的合约和有效合约的触发利率可能不同,不同日期和不同年份发行的有效合约的触发利率也可能不同。 • 每个指数期权的触发利率也可能不同。 • 触发利率每年在期限开始日期都会发生变化,并且永远不会低于最低触发利率。 • 当前可用的 Index Precision 指数期权的 10% 缓冲不能更改。 • 扣除适用费用和收费的金额可能会导致本金或之前获得的绩效积分损失,并且不会在下一个期限结束日期获得绩效积分。 • 投资于指数策略的金额必须持有整个期限,然后才能获得绩效积分。 如果在期限结束日期之前,您全部或部分提款、年金化合约、执行绩效锁定、支付死亡抚恤金或扣除合约费用和开支,则将应用每日调整。即使指数表现在当天为正值或自期限开始日期以来一直为正值,每日调整也可能导致您损失本金和之前的收益。
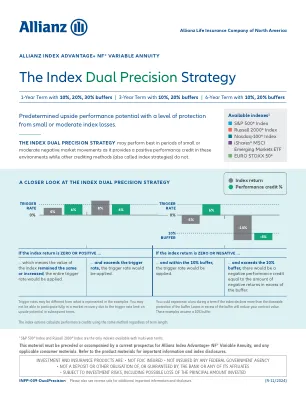
指数双精度策略
• 新发行的合约和有效合约之间的触发利率可能不同,不同日期和不同年份发行的有效合约之间的触发利率也可能不同。 • 每个指数期权的触发利率也可能不同。 • 触发利率在每个新的期限开始日期都可能发生变化,并且永远不会低于最低触发利率。 • 当前可用的 Index Dual Precision Strategy 指数期权的缓冲不能改变。 • 扣除适用费用和收费的金额可能会导致本金或之前获得的绩效积分损失,并且不会在下一个期限结束日期获得绩效积分。 • 投资于指数策略的金额必须持有整个期限,然后才能获得绩效积分。 如果在期限结束日期之前,您全部或部分提款、年金化合约、执行绩效锁定、支付死亡抚恤金或扣除合约费用和开支,则将应用每日调整。即使当天的指数表现为正值或自期限开始日期以来一直为正值,每日调整也可能导致您损失本金和之前的收益。
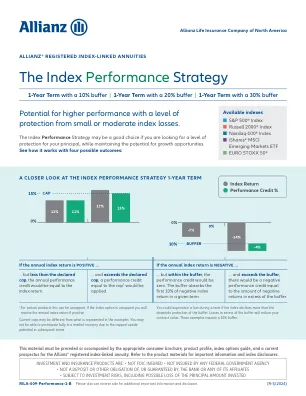
指数表现策略
• 新发行的合约和有效合约之间的上限可能不同,不同日期和不同年份发行的有效合约之间的上限也可能不同。 • 每个指数期权的上限也可能不同。 • 上限每年在期限开始日期更改,并且永远不会低于最低上限。 • 当前可用的指数绩效策略 1 年期指数期权的缓冲不能更改。 • 扣除适用费用和收费的金额可能会导致本金或之前获得的绩效积分损失,并且不会在下一个期限结束日期获得绩效积分。 • 投资于指数策略的金额必须持有整个期限,然后才能获得绩效积分。 如果在期限结束日期之前,您全部或部分提款、年金化合约、执行绩效锁定、支付死亡抚恤金或扣除合约费用和开支,则将应用每日调整。 即使指数绩效在当天为正值或自期限开始日期以来一直为正值,每日调整也可能导致您损失本金和之前的收益。

帕拉马塔地方应急管理计划
x 本计划中详述的安排基于这样的假设:计划所依赖的资源在需要时可用。 x 本计划依赖于应急管理治理框架的有效实施。 x 本计划中详述的安排的有效性取决于所有相关机构准备、测试和维护适当的内部指令和/或常设操作程序。 x 本文件应与《州紧急状况及救援管理法》(SERM Act)https://www.legislation.nsw.gov.au/view/html/inforce/current/act-1989-165、新南威尔士州应急管理计划(NSW EMPLAN)https://www.emergency.nsw.gov.au/Documents/publications/20181207-NSW- state-emergency-management-plan.pdf、州级 EM 计划和政策以及悉尼大都会区 EMPLAN 一起阅读,其中进一步详细介绍了本计划中提到的当局和利益相关者的角色和职能。
遥控飞机的玻璃天花板 - 空军大学
挑选空军领导人非常重要,因为新作战方式的发展取决于高层领导的支持。追求强化既得利益的举措,而不是采用颠覆性的新武器和新理论,这是人类的天性。鉴于这种趋势,军事创新领域的著名学者斯蒂芬·罗森 (Stephen Rosen) 观察到,军事组织很少会在不开辟晋升到高级军衔的新途径的情况下采用新的作战方式。事实上,罗森说,军队内部的创新通常“只与年轻军官晋升的速度一样快”。 1 改革的倡导者找到保护者和赞助人,进行理论实验,并慢慢爬上晋升阶梯,与竞争对手争夺对军队方向的控制权。

unex-rl:通过单向执行加强多阶段推荐系统的长期奖励
近年来,人们对Utiz Liz Liz Liz Liz Liz Formenting学习(RL)的兴趣越来越高,以优化推荐系统中的长期奖励。由于工业推荐系统通常被设计为多阶段系统,因此同时优化多个阶段时,具有单个代理的RL方法会面临挑战。原因是不同阶段具有不同的观察空间,因此不能由单个代理建模。为了解决这个问题,我们提出了一种新型的基于单向执行的多代理增强学习(UNEX-RL)框架,以重新获得多阶段建议系统中的长期奖励。我们表明,单向执行是多阶段推荐系统的关键功能,为多机构增强学习(MARL)的应用带来了新的挑战,即观察依赖性和级联效应。为了应对这些挑战,我们提供了级联信息链(CIC)方法,以将依赖性观测值与动作依赖性观察结果分开,并使用CIC有效地训练UNEX-RL。我们还讨论了UNEX-RL的实际差异技术。fi-Nelly,我们显示了UNEX-RL对公共数据集和具有超过1亿用户的在线推荐系统的有效性。特别是,UNEX-RL揭示了用户使用时间的0.558%与单一AGENT RL算法相比,在线A/B实验中的使用时间为0.558%,强调了UNEX-RL在工业推荐系统中的效率。