XiaoMi-AI文件搜索系统
World File Search SystemInertial

CheetahNAV 数据表 - 惯性实验室
这款多功能战术导航系统利用实时移动地图技术,持续为驾驶员和机组人员提供准确的态势感知信息。CheetahNAV 具有用户友好的图形导航功能,结合惯性和卫星位置信息,可在预设航点之间准确导航至目的地。CheetahNAV 使用先进的惯性导航系统 (INS),该系统由加速度计和陀螺仪等多种辅助设备组成,使用先进的卡尔曼滤波器算法提供平台的准确位置、速度、航向、俯仰和横滚。

全球定位和惯性测量...
前言 本文件介绍了靶场指挥官委员会 (RCC) 的靶场安全组 (RSG) 所开展的工作。本文件取代了 RCC 文件 324-02,即全球定位和惯性测量靶场安全跟踪系统通用标准。虽然新版本对文件正文进行了少量编辑,但主要变化是增加了附录 C,如下所述。本文件包含用于靶场安全目的的机载全球定位系统 (GPS) 和惯性测量跟踪源的要求。文件结构使靶场用户更容易制定详细要求,这些要求代表设计和测试解决方案,以满足特定靶场安全办公室(本文也称为靶场安全)的性能要求。为了解决与性能要求经常导致的歧义和合同误解相关的问题,正文仅包含基于性能的要求,同时包括三个附录,以帮助靶场用户和靶场安全制定详细要求的文件。附录 A 提供了“经验教训”和标准行业实践作为推荐解决方案。附录 B 描述了与性能要求和推荐解决方案相关的原理和安全问题。附录 C 提供了根据本文档中包含的当前性能标准测试 GPS 度量跟踪接收器/转换器的方法

用于导航类型的多模式和惯性传感器解决方案...
本论文提出了一种用于平台导航的和积推理算法,称为多模态 iSAM(增量平滑和映射)。常见的仅高斯似然性具有限制性,需要复杂的前端流程来处理非高斯测量。相反,我们的方法允许前端推迟使用非高斯测量模型的歧义。我们保留了前身 iSAM2 最大乘积算法 [Kaess et al., IJRR 2012] 的非循环贝叶斯树(和增量更新策略)。该方法在贝叶斯(连接)树上传播连续信念,这是非参数因子图的有效符号重构,并渐近近似底层 Chapman-Kolmogorov 方程。我们的方法以最小的近似误差跟踪所有变量边际后验中的主导模式,同时抑制几乎所有低似然模式(以非永久方式)。遵循现有的惯性导航,我们提出了一种新颖的、连续时间的、可追溯校准的惯性里程计残差函数,使用预积分将纯惯性传感器测量无缝地整合到因子图中。我们以因子图为中心(使用饥饿图数据库),将导航元素分离成一个流程生态系统。其中包括实际示例,例如如何推断模糊环路闭合的多模态边际后验信念估计;原始波束形成声学测量;或传统参数似然等。
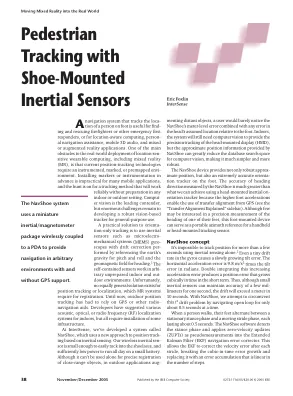
使用鞋装惯性传感器进行行人跟踪
跟踪步行者位置的导航系统可用于寻找和营救消防员或其他紧急救援人员,或用于位置感知计算、个人导航辅助、移动 3D 音频以及混合或增强现实应用。在现实世界中部署位置敏感型可穿戴计算(包括混合现实 (MR))的主要障碍之一是,当前的位置跟踪技术需要仪器化、标记或预先映射的环境。对于许多移动应用来说,提前安装标记或仪器是不切实际的,人们正在寻找一种无需准备即可在任何室内或室外环境中可靠工作的跟踪方法。计算机视觉是领先的竞争者,但开发用于通用的强大视觉跟踪器仍然存在巨大挑战。仅用于方向跟踪的实用解决方案是使用惯性传感器,例如微机电系统 (MEMS) 陀螺仪,通过参考地球重力进行俯仰和滚动,参考地磁场进行航向校正。1 独立式传感器可在任意未准备的室内和室外环境中工作。不幸的是,对于位置跟踪或定位,没有同样通用的解决方案,而 MR 系统需要这些解决方案才能进行注册。到目前为止,室外位置跟踪不得不依赖 GPS 或其他无线电导航辅助设备。开发人员已经提出了各种声学

图像和惯性传感器融合导航
本论文由 AFIT Scholar 的学生研究生作品免费提供给您,供您开放访问。它已被 AFIT Scholar 的授权管理员接受纳入论文和学位论文。有关更多信息,请联系 richard.mansfield@afit.edu。
5 惯性导航系统 (INS) - Nordian
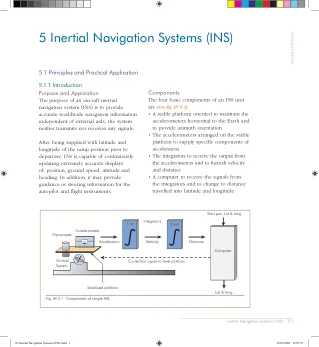
INS - 工作原理 INS 平台上的加速度计测量车辆在南北和东西平面的加速度。加速度信息随后在计算机中被积分两次,并与定时信号进行比较,以产生两个通道(南北和东西)的距离。平台通过陀螺仪稳定的万向系统和平台控制单元保持水平并与真北对齐。飞机轴和 INS 平台轴的相对位置提供有关飞机俯仰、滚转和航向的信息。
用于导航类型的多模式和惯性传感器解决方案...
本论文提出了一种用于平台导航的和积推理算法,称为多模态 iSAM(增量平滑和映射)。常见的仅高斯似然具有限制性,需要复杂的前端流程来处理非高斯测量。相反,我们的方法允许前端推迟使用非高斯测量模型的歧义。我们保留了前身 iSAM2 最大乘积算法 [Kaess et al., IJRR 2012] 的非循环贝叶斯树(和增量更新策略)。该方法在贝叶斯(连接)树上传播连续信念,这是非参数因子图的有效符号重构,并渐近地近似底层 Chapman-Kolmogorov 方程。我们的方法以最小的近似误差跟踪所有变量边际后验中的主导模式,同时抑制几乎所有低似然模式(以非永久方式)。与现有的惯性导航保持一致,我们提出了一种新颖的、连续时间的、可追溯校准的惯性里程计残差函数,使用预积分将纯惯性传感器测量无缝地合并到因子图中。我们围绕因子图(使用饥饿图数据库)集中将导航元素分离成一个流程生态系统。其中包括实际示例,例如如何推断模糊环路闭合的多模态边际后验信念估计;原始波束形成声学测量;或常规参数似然等。

厘米级、稳健的 gnss 辅助惯性后处理...
厘米级、稳健的 GNSS 辅助惯性后处理,用于无本地参考站的移动测绘 J. J. Hutton a、N. Gopaul a、X. Zhang a、J. Wang a、V. Menon a、D. Rieck b、A. Kipka b、F. Pastor b a Trimble Navigation Limited,85 Leek Cr.,Richmond Hill,Ontario,Canada L4B 3B3 – (jhutton、ngopaul、xzhang、jhwang、vmenon)@applanix.com b Trimble Navigation Limited,Haringstrasse 19,Hohenkirchen-Siegertsbrunn Munich,85635,德国 – (Daniel_Rieck、Adrian_Kipka、Fabian_Pastor)@trimble.com ICWG III/I 关键词:差分GNSS、传感器方向、移动测绘、GNSS 辅助惯性、地理配准、机载测绘、直接地理配准、PPP 摘要:近二十年来,移动测绘系统一直使用全球导航卫星系统 (GNSS) 进行地理配准,以测量位置并使用惯性传感器测量方向。为了实现厘米级的位置精度,使用了一种称为后处理载波相位差分 GNSS (DGNSS) 的技术。为了使此技术有效,到单个参考站的最大距离不应超过 20 公里,而当使用参考站网络时,到最近站的距离不应超过约 70 公里。这种设置本地参考站的需求限制了生产力并增加了成本,尤其是在测绘大面积或长线性特征(例如道路或管道)时。用于从 GNSS 进行高精度定位的 DGNSS 替代技术是

惯性聚变能驱动技术
美国所有主要终端使用领域的能源消费均稳步增长,其中电力和天然气增长最快。2017 年全球电力需求增长了 3.1%,其中中国和印度占增长的 70%。自 1950 年以来,美国的发电量增长了 13 倍,2018 年创下了 4% 的增长记录。尽管受新冠疫情影响导致能源需求减少(2019 年至 2020 年下降约 6%),但能源部门脱碳以及实现主权和不受天气影响的能源上网的需求从未如此迫切。惯性聚变能 (IFE) 提供了一种无碳能源的前景,其燃料供应几乎无限。与核裂变不同,聚变发电厂不会产生大量需要长期处置的高放射性核废料。劳伦斯利弗莫尔国家实验室的国家点火装置 (NIF) 最近取得突破,实现了 1.35 MJ 的聚变产量,超过点火所需增益的 70%,表明等离子体燃烧强劲。它将 ICF 和 DT 物理平台推向了聚变点火的门槛。美国的三项主要研究工作围绕驱动内爆和实现所需的高能量密度等离子体条件的三大能源展开:
环形激光陀螺惯性导航
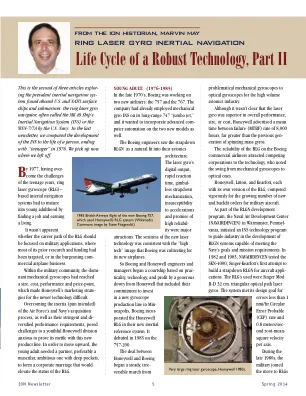
1977 年,克服了青少年时期的挑战,基于环形激光陀螺仪 (RLG) 的内部导航系统必须成长为成年人,找到工作并谋生。当时尚不清楚 RLG 的职业道路应该专注于军事应用(其之前的大部分研究和资金都针对此类应用)还是蓬勃发展的商用飞机业务。在军事领域,占主导地位的机械陀螺仪已经达到了一定的尺寸、成本、性能和价格点,这导致霍尼韦尔针对新技术的营销策略变得困难。克服空军和海军采购过程的惯性(双关语)及其严格而多样化的性能要求,对年轻的霍尼韦尔部门提出了挑战,该部门急于用这条新产品线证明自己的勇气。为了向上发展,年轻人需要一个合作伙伴,最好是一个实力雄厚、雄心勃勃、财力雄厚的合作伙伴,以建立企业联姻,提升 RLG 的地位。