XiaoMi-AI文件搜索系统
World File Search SystemInspired
受社区启发的未来战略 2020 – 2025
我们提供和建造低于平均收入人群可以负担得起的房屋。我们了解自己作为当地社区“管家”的角色。 我们以社区为基础。我们专注于南曼彻斯特及其附近地区,这意味着我们了解我们的社区,并且知道与租户和居民合作的办法。 我们关心住在我们房屋中的人们。我们建立信任和信心,并相信我们可以共同取得成功。 我们利用我们的技能和资源来解决不平等问题、减少贫困并改善我们多元化社区的生活。我们支持、建议并帮助人们发挥潜力并过上好日子。 我们的服务物有所值。我们富有创造力地解决问题,并有效利用我们的财务实力。我们与他人合作以创造更大的成果。 如果这对他人有帮助,我们将推广我们擅长的领域,并从中获利,以便在南曼彻斯特建造更多经济适用房。
运输和处理李离子电池 - 灵感的能量
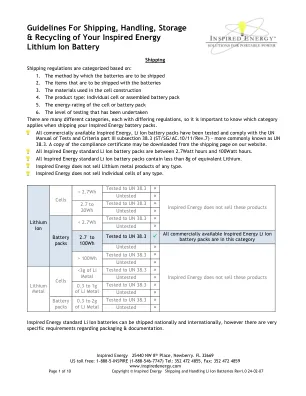
IATA锂电池指导文件。为2013年法规修订的锂金属和锂离子电池的运输。日期为2012年4月10日(或随后的修订)IATA危险货物法规第54版生效于2013年1月1日生效,两者均可从www.iata.org锂离子处理标签上获得:搜索互联网上的“锂离子处理标签”。可以在空白空间中购买lables,以识别内容为锂离子,并且要添加您的电话号码。您无法重新使用我们的李离子处理标签,因为当您向后运送产品时,必须使用您的电话号码。包装:如果您重复使用我们的运输盒,则您的责任是托运人,以确保盒子100%适合其持续旅程。注意:我们的盒子仅用于一次旅行。找到载体:

启发,但不模仿:人工智能与人类智能之间的对话
顾:我认为智能不只是拥有尽可能多的知识,而是从知识中学习普遍的规则,并运用到新任务中去。在神经科学中,有一个很好的例子,就是爱德华·托尔曼在1948年提出的“认知地图”。这个概念最早是在观察老鼠在迷宫中漫游时的行为时提出的。在这种空间导航任务中,老鼠首先将一系列空间和时间事件作为自我中心坐标存储起来,形成“情景记忆”,然后以认知地图的形式进一步转化为更抽象的“语义记忆”。基于自我中心地图,老鼠和其他动物可以利用结构化知识在新环境中导航,或者在迷宫中某些路径被阻塞时规划新路线。现在,我们知道认知地图不仅是空间导航的地图,也是抽象导航的地图,例如通过社交或价值空间。在最近的一篇《细胞》文章中,科学家发现猴子使用相同的大脑区域(包括海马体)来穿越空间,无论是物理空间还是抽象空间。这些大脑区域负责抽象一般规律并形成可以转移以解决不同问题的真实知识。这就是人类和其他动物拥有元学习或学会学习的能力的方式,这实际上是智力的关键,特别是使我们能够掌握多任务处理的一般智力。

受人类情感感知机制启发的情感导向预训练探索
深度卷积神经网络(DCNN)的预训练在视觉情绪分析(VSA)领域起着至关重要的作用。大多数提出的方法都采用在大型物体分类数据集(即 ImageNet)上预训练的现成的主干网络。虽然与随机初始化模型状态相比,它在很大程度上提高了性能,但我们认为,仅在 ImageNet 上进行预训练的 DCNN 可能过于注重识别物体,而未能提供情绪方面的高级概念。为了解决这个长期被忽视的问题,我们提出了一种基于人类视觉情绪感知(VSP)机制的面向情绪的预训练方法。具体而言,我们将 VSP 的过程分为三个步骤,即刺激接受、整体组织和高级感知。通过模仿每个 VSP 步骤,我们通过设计的情绪感知任务分别对三个模型进行预训练,以挖掘情绪区分的表示。此外,结合我们精心设计的多模型融合策略,从每个感知步骤中学习到的先验知识可以有效地转移到单个目标模型中,从而获得显着的性能提升。最后,我们通过大量实验验证了我们提出的方法的优越性,涵盖了从单标签学习(SLL)、多标签学习(MLL)到标签分布学习(LDL)的主流 VSA 任务。实验结果表明,我们提出的方法在这些下游任务中取得了一致的改进。我们的代码发布在 https://github.com/tinglyfeng/sentiment_pretraining 。

伟大的心启发了头脑强壮的翅膀公司
我们还担心对教师的压力。他们的福祉对他们和我们的学生来说都是至关重要的。他们不再教“班级”:他们教25个人,所有人都有不同的需求,个人情况和反馈要求。今天的课程更加量身定制,多样性要多得多,计划得更好,并且总是更有趣。这对男孩来说很棒,但可以给敬业的老师带来成本,他们将永远为学生做更多的事情。新的工作环境也为运营和支持人员带来挑战。创新和不断变化的期望应意味着员工的工作方式不同,而不仅仅是更多。

自然界的最新进展启发了自动系统的摩擦电纳米生成器
抽象的摩擦电纳米生成剂(Tengs)站在能量收集创新的最前沿,通过扭矩电信和静电诱导将机械能转化为电力。这项开创性的技术解决了对可持续和可再生能源解决方案的迫切需求,为自动系统开辟了新的途径。尽管有潜力,但Tengs仍面临挑战,例如材料优化,以增强摩擦电效应,可伸缩性和在各种条件下提高转化效率。耐用性和环境稳定性也构成了重大障碍,需要对更弹性的系统进行进一步的研究。自然启发的Teng设计通过模拟生物学过程和结构(例如植物的能量机制和动物皮肤的质感表面)提供了有希望的解决方案。这种仿生方法已导致材料特性,结构设计和整体性能的显着改善,包括提高能量转换效率和环境鲁棒性。对生物启发的Tengs的探索已解锁了能源收集,自动传感和可穿戴电子产品的新可能性,强调通过创新设计降低能耗和提高效率。本综述封装了自然界中的挑战和进步,激发了滕斯的启发,强调了仿生原理的整合以克服当前的局限性。通过专注于增强电气性能,生物降解性和自我修复功能,自然启发了Tengs为更可持续和多功能的能源解决方案铺平了道路。

沿着晶须启发的触觉传感器的动态接触估计
啮齿动物中的一个有趣的共同特征是它们的晶须,他们可以积极地移动以感知环境周围的接触。这些晶须具有各种功能,例如从对象中提取轮廓,为机器人提供位置估算,识别纹理特征以及积极避免碰撞。基本上,它为低计算成本的机器人提供了一种非侵入性的触觉感知,尤其是在非结构化,混乱和视力障碍的环境中有益的。实现实时的被动接触估计并确保强大的机械设计对于这种传感器至关重要。以前的方法通常依赖于6轴力/扭矩传感器[1],压电电阻[2]或其他与力相关的传感器。但是,这些解决方案通常是庞大而挑战的规模。相比之下,磁透射的晶须[3]提供了更紧凑且易于集成的解决方案,能够用平行的晶须形成阵列。尽管如此,基于磁通量在根周围的磁通量变化而准确地对接触运动进行建模并沿晶须轴进行定位,这在很大程度上取决于强大的设计。我们已经构建了一种产生提示联系估计的方法,但是由于缺乏对物体形状的先验知识,基于切向接触状态估计的当前方法仍然遭受动态误差[4]。

受最优状态转移启发的组合优化快速量子方法
在组合优化问题中,例如 MAX-CUT 或 TRAVELLING-SALESPERSON [ 1 ],目标是从某个初始状态演化到编码优化问题解的最终状态。一种方法可能是绝热演化,将每个初始状态和最终状态编码为某个汉密尔顿量的基态,并在它们之间足够缓慢地插值。在实践中,这种方法受到插值汉密尔顿量的最小谱隙的限制 [ 2 , 3 ]。这种方法被称为绝热量子优化 (AQO) [ 4 – 8 ]。在缺乏成熟硬件的情况下,AQO 依靠绝热原理作为指导设计原则。反过来,AQO 导致了量子退火 (QA)。与 AQO 类似,QA 试图在初始和最终汉密尔顿量之间连续插值。QA 表示一种更广泛的

ma-贻贝启发的自我修饰非常有效...
降压涂层代表了一种通用成本效益的方法,可为各种底物提供保护,而不会损害底物的批量特性。然而,由于缺乏理性的设计原则,创建结合高效率,强烈的粘附和自我重新申请的水性聚合燃料涂层是有吸引力但又极具挑战性的。Inspired by mussel's unique adhesive, self-healing, and char-forming mechanisms, herein, a “group synergy” design strategy is proposed to realize the combination of self-healing, strong adhesion, and high efficiency in a fully polymeric fire-retardant coating via multiple synergies between catechol, phosphonic, and hydroxyethyl groups.创建的粘贴涂层表现出快速的房间温度自我修复能力和对(非)极性底物的强粘附能力,这是由于这些组启用了多种动态非共价相互作用。由于这些官能团在暴露于浮游时的结构完整但略微扩展的炭层的形成,因此,200μm厚的涂层可以使极其易碎的聚苯乙烯泡沫非常困难地点燃和自我效果,这远远超过了先前的策略。此外,这种涂层可以为从聚合物泡沫和木材到织物和钢的各种底物提供通用的特殊保护。这项工作提出了一种有希望的材料设计原则,可以创建下一代可持续的高性能燃料涂层,以进行一般保护。

4D打印湿度驱动的种子灵感的软机器人
天然素种子是软机器人技术中的榜样,这要归功于它们自主在湿度变化驱动的土壤中自主移动的能力。其迁移率和适应性背后的秘密体现在生物学吸湿组织的分层结构和解剖学特征中,几何设计为选择性地响应环境湿度。通过生物启发的方法,研究了肠肢(L.F.)野生种子的内部结构和生物力学,以开发用于设计软机器人的模型。作者根据自然规范和模型,利用4D印刷材料的重塑能力来制造类似种子的软机器人,并使用可生物降解和吸湿的聚合物。机器人模仿天然种子的运动和性能,达到≈30μnm的扭矩值,伸展力为≈2.2.5mn,它能够提起其自身重量的100倍。在环境湿度变化的驱动下,人工种子能够探索样品土壤,使其形态适应与土壤粗糙度和裂缝相互作用。