XiaoMi-AI文件搜索系统
World File Search SystemInteract

信息维度简介
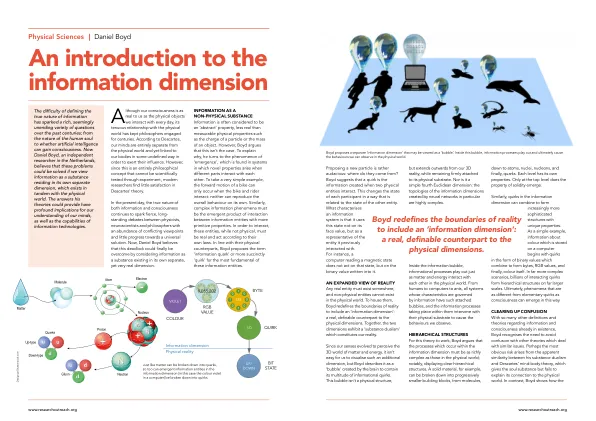
信息作为一种非物理实体 信息通常被认为是一种“抽象”属性,不如可测量的物理属性(例如粒子的电荷或物体的质量)真实。然而,博伊德认为事实并非如此。为了解释原因,他转向“涌现”现象,这种现象存在于系统中,当不同部分相互作用时,会产生新属性。举一个非常简单的例子,自行车的向前运动只有在自行车和骑车人相互作用时才会发生:两者都无法单独重现整体行为。同样,复杂的信息现象必须是具有更原始属性的信息实体之间相互作用的涌现产物。为了进行交互,这些实体虽然不是物理实体,但必须是真实的并按照自己的规律行事。与物理对应物一致,博伊德提出了“信息夸克”或更简洁的“怪癖”一词来表示这些信息实体中最基本的实体。


暴露后预防 (Pep) 抗逆转录病毒入门包
这些药物都不会与其他药物产生显著的相互作用,但如果您正在服用其他药物,则应告知医生。PEP 药物很少会与其他药物产生相互作用,包括您自己购买的药物(例如抗酸药、止痛药)、草药和一些食品补充剂。您应该告诉医生或药剂师您目前或有时服用的任何药物。在服用 PEP 期间开始服用任何新药物之前,请务必咨询医生或药剂师。


回顾对人工智能代理的信任:社交机器人设计面部拟人化可信度的系统评价
随着技术的发展和应用到不同的日常情境中[1-4],社交机器人作为最新创新的代表之一,是一种能够与人类进行社交交流和互动的人工智能系统[5-7]。与传统的人形机器人(如机器人产品、Zora Robot)不同,这些机器人在物理上体现了特定的人类特征,一些最新的社交机器人(如机器人产品、Jibo、Welbo、Misa、QTrobot、Hub、Mykie和Buddy Robot)设计有屏幕,带有动画人脸,可以与人交流和互动[8,9]。例如,图 1 展示了Buddy Robot,它设计有类似人类的眼睛和嘴巴,可以在情感上陪伴人类、与人类互动,并响应人类的需求。事实上,可能有必要为社交机器人设计一个类似头部的界面,以促进人机关系中的交流[10,11],因为人类的社会认知和感知过程可能会鼓励人们概括与人类相关的知识和认知,形成对与社交机器人的行为互动的期望[12]。

动态梯度结构产生大脑活动状态
人类大脑表现出多种多样但有限的活动状态。虽然这些状态可以在低维潜在空间中忠实地表示出来,但我们对组成功能解剖学的理解仍在不断发展。在这里,我们将降维应用于无任务和任务 fMRI 数据,以解决潜在维度是否反映内在系统,如果是,这些系统如何相互作用以产生不同的活动状态。我们发现每个维度都代表一个动态活动梯度,包括全局信号下的主要单极感觉联想梯度。梯度在个体和认知状态下似乎很稳定,同时概括了关键的功能连接特性,包括反相关、模块化和区域中心性。然后,我们使用动态系统建模来表明梯度通过状态特定的耦合参数因果相互作用以创建不同的大脑活动模式。总之,这些发现表明,一组动态的内在空间梯度相互作用以确定可能的大脑活动状态。