XiaoMi-AI文件搜索系统
World File Search SystemInverse

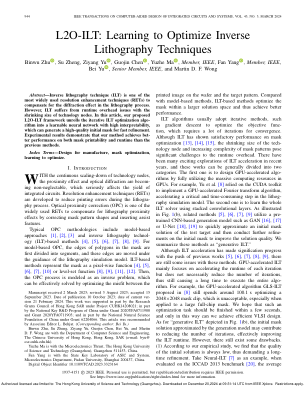
L2O-ILT:学习优化逆向光刻技术
一、引言 随着技术节点的不断缩小,邻近效应和光学衍射变得不可忽略,严重影响集成电路的成品率。分辨率增强技术(RET)是为了减少光刻过程中的印刷误差而开发的。光学邻近校正(OPC)是广泛使用的RET之一,通过校正掩模版图案形状和插入辅助特征来补偿光刻邻近效应。典型的OPC方法包括基于模型的方法[1]、[2]、[3]和基于逆光刻技术(ILT)的方法[4]、[5]、[6]、[7]、[8]、[9]。对于基于模型的 OPC,首先将掩模中的多边形边缘划分为段,然后在光刻模拟模型的指导下移动这些边缘。基于 ILT 的方法将掩模表示为逐像素函数 [4] 、 [5] 、 [6] 、 [7] 、 [10] 或水平集函数 [8] 、 [9] 、 [11] 、 [12] 。然后,将 OPC 过程建模为逆问题,可以通过优化
L2O-ILT:学习优化逆向光刻技术
I. 引言 随着技术节点的不断缩小,邻近效应和光学衍射变得不可忽略,严重影响集成电路的成品率。分辨率增强技术(RET)被发展用来减少光刻过程中的印刷误差。光学邻近校正(OPC)是广泛使用的RET之一,它通过校正掩模版图案形状和插入辅助特征来补偿光刻邻近效应。典型的OPC方法包括基于模型的方法[1],[2],[3]和基于逆光刻技术(ILT)的方法[4],[5],[6],[7],[8],[9]。对于基于模型的OPC,首先将掩模版中多边形的边缘分成几段,然后在光刻仿真模型的指导下移动这些边缘。基于 ILT 的方法将掩膜表示为像素函数 [4]、[5]、[6]、[7]、[10] 或水平集函数 [8]、[9]、[11]、[12]。然后,将 OPC 过程建模为逆问题,可以通过优化

多孔材料的逆向设计:扩散模型...
图 1. 沸石生成扩散过程的图形模型。a,本文开发的扩散模型的沸石结构输入表示。b,沸石生成扩散模型的噪声和去噪过程的图形说明。c,沸石网格的渐进采样过程
在四方逆中调节磁性反斯格明子稳定性……
识别支持环境温度下复杂可调磁序的材料是开发新型磁性设备架构的基础。我们报告了 Mn 2 XY 四方逆 Heusler 合金的设计,该合金能够承载磁性反斯格明子,其稳定性对弹性应变敏感。我们首先构建一个通用磁哈密顿量,捕捉这些材料中可能出现的短程和长程磁序。该模型揭示了接近磁相边界所必需的关键磁相互作用组合,其中磁结构极易受到弹性应变等小扰动的影响。然后,我们通过计算搜索可以实现这些关键相互作用的四元 Mn 2 (X 1 , X 2 ) Y 合金,这些合金很可能在逆 Heusler 结构中合成。我们认为 Mn2Pt1-zXzGa 材料系列(其中 X = Au、Ir、Ni)是获取所有可能磁相的理想系统,具有几种可以通过机械方式驱动磁相变的关键组成。

反相悬浮聚合法制备丙烯酸
采用逆向悬浮聚合法合成交联聚丙烯酸。研究了该过程以确定引发剂浓度、混合速度和交联剂等各种参数的影响。将含有少量中和的丙烯酸、交联剂和引发剂的水相分散在自然相中,并用表面活性剂稳定。聚合由过硫酸钾 (K 2 S 2 O 8 ) 引发,MBA 作为交联剂。SPAN 80 作为表面活性剂。逆向悬浮是在甲苯 (烃) 中作为自然相进行的,因为交联剂在水相中的可及性受交联剂在水相和连续烃相之间的包裹系数控制,随着引发剂、交联剂浓度、分散剂浓度、中和度和混合速度等条件的变化,吸收能力和聚乙烯醇在两个阶段的影响都得到了检验。评估了 SAP 在盐水 (0.9% NaCl) 中的自由吸收能力。这是为了优化肿胀和保留行为。

金属氧化物化学逆向设计路线图
图 2 [P 8 W 48 O 184 ] 40 −(缩写为 {P 8 W 48 })节点和过渡金属连接体(Co、Mn、Ni、Ag)的最小构建块库,形成 14 种 POM-全无机框架架构(即“ POMzite ”)。它们都共享 {P 8 W 48 } 构建块,具有简化的环表示(绿色),并具有四种结构组装类型:链(POMzite-4、9、10、14)、柱状(POMzite-5、6、8、11、13)、人字形(POMzite-2、7、12)和立方体(POMzite-3)。我们从迄今为止描述的 14 种 POMzite 架构中选择了 10 个代表性示例。到目前为止,已探索的实验数据集包含 30 个 POMzite 框架,但可访问的化学空间非常广阔。POMzite 结构经 Boyd 等人许可转载,[1] 美国化学学会

生物面部处理中的高效逆图形
视觉不仅可以检测和识别物体,还可以对导致我们看到的光图案的底层场景结构进行丰富的推断。反转生成模型或“综合分析”提供了一种可能的解决方案,但其机械实现通常对于在线感知来说太慢,并且它们与神经回路的映射仍不清楚。在这里,我们提出了一种神经上合理的高效逆向图形模型,并在人脸识别领域对其进行了测试。该模型基于一个深度神经网络,该网络可以学习在一次快速前馈过程中反转三维人脸图形程序。它定性和定量地解释了人类行为,包括经典的“空心脸”错觉,并直接映射到灵长类动物大脑中专门的面部处理电路上。与最先进的计算机视觉模型相比,该模型更适合行为和神经数据,并提出了一种可解释的逆向工程来解释大脑如何将图像转化为感知。

用于材料逆向设计的生成深度学习
除了利用机器学习对材料性质进行正向推断之外,生成式深度学习技术在材料科学中的应用还可以实现材料的逆向设计,即以相反的方式评估成分-加工-(微)结构-性质关系。在本综述中,我们重点关注(微)结构-性质映射,即晶体结构-内在性质和微结构-外在性质,并全面总结如何进行生成式深度学习。详细讨论了晶体结构和微结构的潜在空间构建、生成学习方法和性质约束三个关键要素。并概述了现有方法在计算资源消耗、数据兼容性和生成产量方面面临的挑战。

Jishen Zhao -UCSD CSE
图1。我们引入了一个时空优化器,该优化器概括了亚当和拉普拉斯平滑(大步骤)。除了时间过滤(如Adam)外,它还将各向异性交叉双侧过滤器应用于跨空间的梯度。我们的跨双边滤波器可以减少梯度噪声,并通过在先前施加分段平滑度来改善各向异性目标的条件。我们的方法可以使(a)纹理,(b)体积和(c)在非常低的样品计数下的纹理和(c)网格的更快收敛和更高质量的逆渲染;所有实验仅使用每个像素的1个样品进行梯度估计。(a)对于100次迭代后粗糙度纹理恢复,我们的方法融合了,而其他方法则具有伪像。(b)用于体积密度和反照率恢复仅50次迭代,我们的方法已经可以恢复粗糙的形状和颜色。更高的样本计数进一步优化可恢复详细信息。(c)对于网格恢复,我们的方法能够比竞争方法更快地恢复尖锐的功能(顶行,立方体)和薄结构(底行,龙)。在窗户上改编的场景©Bernhard Vogl,Autumn Field©Jarod guest and Sergej Majboroda,高分辨率烟雾羽流©Jangafx,Kloppenheim 06©Greg Zaal和Asian Dragon和Asian Dragon©Stanford Computer Graphics Labrications。

3- ...
摘要。在组装,焊接和绘画等行业中,对精确和多功能机器人系统的需求越来越多,这表明了运动学分析的重要性。本文旨在研究和解释三度(3-DOF)操纵器的运动学特性,该操作器涵盖了旋转磁盘,例如基础和两个旋转的接头,也称为旋转接头。通过分析前进和逆运动学,本文旨在更好地理解并控制该机器人臂显示的运动性质。Forward kinematics entails calculating the values of the location and orientation of the end effector in connection with particular joint parameters.另一方面,逆运动学旨在找到特定的关节参数,以达到特定的最终效果位置。本文使用数学模型和计算算法来求解运动学方程,从而使操纵器可以精确地移动其域内。通过比较所使用的转换矩阵的详细模型,机器人组的工作移动得到了完全预测和调节。从这种批判性分析中得出的结论是,所提出的解决方案导致对机器人运动运动的理论理解有重大飞跃,并有效地对精确的工作自动化环境具有有效的影响。因此,此基础为开发高级机器人控制算法创建了更多途径。