XiaoMi-AI文件搜索系统
World File Search SystemIsometric
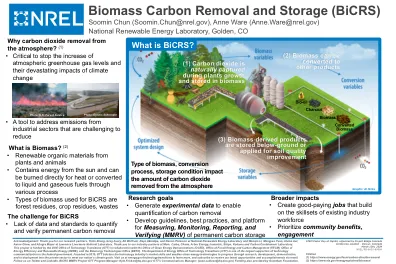
生物质去除和储存(BICR)
Acknowledgement: Thank you for our research partners, Yimin Zhang, Greg Avery, Ed Wolfrum, Dayo Akindipe, and Darren Peterson at National Renewable Energy Laboratory and Wenqin Li, Mengyao Yuan, Alvina Aui, Aaron Chew, and Allegra Mayer at Lawrence Livermore National Laboratory.感谢我们在Mote,Carba,Charm,Arbor Energy,Isometric,Stripe,Kodama和Carbon Conbon Connionment Laboratory的行业合作伙伴。该项目由DOE技术过渡办公室(OTT)与清洁能源示范办公室(OCED)合作,化石能源和碳管理办公室(FECM),能源效率和可再生能源办公室(EERE)以及Bioenergy技术办公室以及Bioenergy技术办公室(Beto)。能源部技术过渡部(OTT)是联邦政府最大的技术商业化支持者之一。成立于2015年,Ott Bolsters技术行业的市场技能,使清洁能源技术能够通过研究,开发,演示和部署到私营部门来实现我们国家的气候目标。访问我们的Energy.gov/technology Transitions了解更多信息,并订阅通过电子邮件获得我们最新的机会和成就。在Twitter和LinkedIn上关注我们。BICRS MMRV项目OTT计划经理:kyle.fricker@hq.doe.gov ott的通讯经理:( Sean.sullivan@hq.doe.gov)也由Grantham Foundation提供了资金。BICRS MMRV项目OTT计划经理:kyle.fricker@hq.doe.gov ott的通讯经理:( Sean.sullivan@hq.doe.gov)也由Grantham Foundation提供了资金。

使用运动单位放电信息在手指屈曲和延伸过程中的灵活力估计
摘要 - 随着高级机器人手的发展,可靠的神经机界面对于充分利用机器人的功能灵活性至关重要。在这项初步研究中,我们开发了一种新的方法,可以在灵巧的手指屈曲和伸展过程中连续和同时估计单个手指的等距力。具体而言,分别从手指伸肌和屈肌记录的表面高密度肌电图(EMG)信号中提取运动单元(MU)排放活性。MU信息被分为不同的组,与单个手指的屈曲或伸展相关,然后在多手指屈曲和扩展任务期间用于预测单个手指力。与常规EMG振幅方法相比,当使用线性回归模型时,我们的方法可以获得更好的力估计性能(预测力和测量力之间的较高相关性和较小的估计误差)。对我们方法的进一步探索可以潜在地提供强大的神经机界面,以直观地控制机器人手。

容错之前量子计算实用性的证据
量子计算有望在某些问题上提供比传统计算更快的速度。然而,发挥其全部潜力的最大障碍是这些系统固有的噪声。这一挑战被广泛接受的解决方案是实现容错量子电路,而这超出了当前处理器的能力。我们在此报告了在嘈杂的 127 量子比特处理器上进行的实验,并展示了在超越蛮力传统计算的规模上对电路体积的准确期望值的测量。我们认为这代表了量子计算在容错时代之前的实用性的证据。这些实验结果得益于超导处理器在这种规模上的相干性和校准方面的进步,以及表征 1 和可控制地操纵如此大型设备上的噪声的能力。我们通过将测量的期望值与精确可验证电路的输出进行比较来确定其准确性。在强纠缠状态下,量子计算机提供了正确的结果,而基于纯态的一维(矩阵积态,MPS)和二维(等距张量网络态,isoTNS)张量网络方法 2,3 等领先的经典近似方法则无法实现。这些实验展示了实现近期量子应用的基础工具 4,5 。

将技术、人工智能与基础知识相结合
体育科学的现状 在过去 10 个月中,通过我的 (MB) 咨询、研讨会和指导,我遇到了体育科学界反复出现的问题。很明显,这个行业落后于预期。许多从业者都在走捷径,依赖最新的论文或社交媒体趋势,而没有深入了解其基本原理。例如,等长运动最近以新的名称和术语重新出现,还有课程和技术(例如用于测量它们的力板),好像它们是新概念一样。虽然这些方法变得更容易获得和理解是值得称赞的,但我们必须确保不要将重新包装的内容与长期存在的内容混淆。正如 Jos J. de Koning 和 Carl Foster (2024) 最近的著作《体育和运动生理学中的 100 篇基本论文》所强调的那样,最有影响力的论文往往要古老得多。这些都是基础论文。例如,在 100 篇重要论文中,有 37 篇发表于 50 多年前,有 63 篇发表于 1973 年之后,而且只有少数论文来自

B.TECH 的计划和教学大纲。(人工智能...
CO1 根据情况选择、构建和解释适当的绘图比例。CO2 绘制简单曲线,如椭圆、摆线和螺旋线。CO3 绘制点、线和平面的正交投影。CO4 绘制立体的正交投影,如圆柱体、圆锥体、棱柱和金字塔,包括截面。CO5 为实际情况开发立体布局。CO6 绘制简单物体的等距投影。介绍和写信。平面、对角线和游标尺的构造和使用。绘制椭圆、抛物线和双曲线的方法。绘制摆线、螺旋线的方法。正交投影和点投影。线投影、平面投影、立体投影。棱柱、金字塔、圆柱和圆锥的介绍。立体的截面、表面相交的介绍。平面和曲面的发展。等距投影。教科书/参考书目 1.N.D. Bhatt。基础工程。绘图,Rupalee 出版,Anand。2.Lakshmi Narayan 和 Vaishwanar。实用几何教科书,Jain Brother,新德里。3.R.B.Gupta。工程制图教科书,SatryPrakashan,新德里。4.技术制图基础,帕金森。
恒河猴中连接显着性检测和运动反应的皮质机制
突然的、令人意外的感觉事件会触发神经过程,从而迅速调整行为。为了研究这种现象的系统发生和机制,我们训练两只雄性恒河猴通过对等长操纵杆施加力量来将光标保持在视觉目标内。我们研究了令人意外的听觉刺激对施加的力量、头皮脑电图 (EEG) 活动和从背外侧前额叶皮质记录的局部场电位 (LFP) 的影响。听觉刺激引起 (1) 等长力的双相调制,短暂下降然后是纠正性的紧张性增加,和 (2) 由两个大的负波 - 正波 (N70 和 P130) 主导的 EEG 和 LFP 偏转。EEG 电位在头皮顶点对称且最大,非常类似于人类的“顶点电位”。 “皮层电位和力量紧密相关:P130 振幅预测了矫正力增加的幅度,特别是在从深层而非浅层皮层记录的 LFP 中。这些结果揭示了一种系统发育上保留的皮层运动机制,支持对突出的感觉事件做出反应的适应性行为。

平衡的强度:具有和不运动过度的儿童的力量和动态平衡
广义关节过度运动(GJH)是韧带松弛的结果,通常以贝顿评分检查,其患病率通常取决于年龄,性别和种族[1,2]。gjh通常是遗传来源,但也可以通过锻炼,拉伸或创伤获得[3,4]。尽管GJH增强了需要灵活性的活动,但它也构成了并发症的风险,特别是肌肉骨骼症状[5-7]。先前作者的初始假设是,超动关节是不稳定的,它倾向于重复的微型创伤,会随着时间的推移破坏机械感受器[8,9]。这将导致关节损伤,关节痛和其他并发症,例如受损的本体感受,强度受损和平衡差[10,11]。当GJH与上述肌肉骨骼症状相关联时,它被称为过度运动频谱障碍(HSD)[12]。尽管GJH是出现肌肉骨骼症状的风险,但肌肉骨骼症状的生物标志物和临床预测因子也很大可变[13-15]。有趣的是,当肌肉骨骼系统的生长正在进行时,在生物学上不成熟的儿童中,过度运动的继承性更为普遍[13,16]。如果患有GJH的孩子更容易容易出现微型创伤,这仍然是一个问题,因为他们的协调较低或具有较小的肌肉力量以适应突然平衡障碍[17]。这提出了一个建议,即未成熟的肌肉力量在GJH中起作用。在病理的背景下,力量和平衡很重要[18]。它们对于许多日常活动和休闲活动至关重要,并且假定两者的赤字将对个人的参与水平产生负面影响[19]。肌肉适应性是肌肉活动不同组成部分(肌肉力量,力量和耐力)的协同作用,使多个肌肉群以各种关节角度的协调方式共同工作,并取决于活动的不同时期[20-22]。肌肉力量是一个人可以产生的最大力量或可以举起的重量[23],而爆炸能力是在运动爆发中立即产生最大肌肉收缩的能力[24]。另一方面,在不疲劳的情况下重复运动的能力是肌肉耐力[25,26]。等距强度通过肌肉收缩对一个关节的最大电阻在一个方向上的最大电阻来测试,其余身体处于稳定位置[27]。最后,执行基本运动技能所需的力量称为功能强度[26]。然而,在等距条件下大部分评估了运动过度的个体的肌肉力量,而功能强度可能更相关

深度 EEG 和 fNIRS 实时解码双手力量
摘要 — 与侵入式脑机接口 (BCI) 相比,非侵入式皮质神经接口在肢体运动及其力量的皮质解码方面仅取得了中等水平的表现。虽然非侵入式方法更安全、更便宜、更容易获得,但信号在空间域 (EEG) 或时间域 (功能性近红外光谱 (fNIRS) 的 BOLD 信号) 中分辨率较差。之前从未实现过双手力产生和连续力信号的非侵入式 BCI 解码,因此我们引入了一个等距握力跟踪任务来评估解码。我们发现,使用深度神经网络结合 EEG 和 fNIRS 比线性模型更能解码左手和右手产生的连续握力调节。我们的多模态深度学习解码器在力重建中实现了 55.2 FVAF[%],并且解码性能比每种单独的模态提高了至少 15%。我们的结果表明,使用非侵入性移动脑成像获得的皮质信号实现连续手力解码的方法对康复、恢复和消费者应用具有直接影响。
运动皮层在运动图像期间保留并重新定位神经动力学
电动机皮层最突出的特征是在移动执行过程中激活其激活,但是当我们简单地想象在没有实际电动机输出的情况下移动时,它也很活跃。尽管进行了数十年的行为和成像研究,但在秘密运动影像过程中,运动皮层中的特定活动模式和时间动力学与运动执行过程中的特定活动模式和时间动力学如何相关。在这里,我们记录了两个人的运动皮层,他们在脊髓损伤不完全的情况下保留了一些残留手腕功能,因为他们既进行实际和想象中的等距腕部伸展)。我们发现,我们可以将人口活动分解为三个正交子空间,在动作和图像中,一个人群同样活跃,而其他人只有在单个任务类型(Action或Imagery)中活跃。尽管它们居住在正交神经维度,但动作唯一和唯一的图像子空间包含了一组非常相似的动态特征。我们的结果表明,通过将与电机输出相关的组件和/或反馈重新定位为独特的输出无效图像子空间,Motor Cortex保持与执行期间相同的总体人口动态。
![arXiv:2001.09091v1 [math.GT] 2020 年 1 月 22 日](/simg/a\a260cb6ac7d92b0cf979e95f70bfcd3946678357.webp)
arXiv:2001.09091v1 [math.GT] 2020 年 1 月 22 日
摘要。作者先前利用具有关系的自由群 G 子群的陪集结构找到了一种通用量子计算模型。G 中指数为 d 的有效子群 H 导致 d 维希尔伯特空间中的“魔法”状态 | ψ ⟩,该状态编码最小信息完备量子测量 (MIC),可能带有有限的“上下文”几何。在本研究中,我们选择 G 作为奇异 4 流形 V 的基本群 π 1 (V),更准确地说是“小奇异”(时空) R 4 (即同胚和等距,但不与欧几里得 R 4 微分同胚)。我们所选的例子归功于 S. Akbulut 和 RE Gompf,它具有两个显著的特性:(a) 它显示了标准上下文几何的存在,例如法诺平面(索引 7 处)、梅尔明五角星(索引 10 处)、两量子比特交换图像 GQ (2 , 2)(索引 15 处)以及组合格拉斯曼流形 Gr(2 , 8)(索引 28 处);(b) 它允许将 MIC 测量解释为源自此类奇异的(时空) R 4 。我们将拓扑量子计算与奇异时空联系起来的新图像也旨在成为一种“量子引力”方法。