XiaoMi-AI文件搜索系统
World File Search SystemJetson

Joshua Julian DamanikJoshua Julian Damanik
Robotics hardware : 2D/3D LiDAR, Depth camera, Sensors & actuators, NVIDIA Jetson, Raspberry, Arduino Robotics design : Solidworks, OnShape, Autodesk Fusion, Altium Designer Robotics software : ROS, Gazebo (Classic & Gz), Webots, Matlab Machine learning : PyTorch, Tensorflow, Reinforcement learning, Immitation learning, Time-series analysis Software development : Python, C++, Docker, Git, Linux, Javascript Web development : React, Node.js, SQL, AWS, Svelte, MongoDB, DynamoDB Language : English (TOEIC 970), Korean ( 한 국 어 능 력 시 험 6 급 ), Indonesian (Native)
![[SSC21-I-12]](/simg/f\ff928d6c92e522ff5dfa9eca80272f7dfc966734.webp)
[SSC21-I-12]
随着发射的成本暴跌,现在比以往任何时候都更容易进入轨道。这导致了每年发射的卫星数量的扩散,导致每天的数据的链接下降。地面站收到的数据通常是未经处理的,这使得考虑到大型数据大小,并且并非所有数据都有用。这加上对实时数据处理的需求不断增长,导致对轨道处理解决方案的需求不断增长。在这项工作中,我们通过将不同的图像压缩技术应用于卫星数据来研究基于CNN的对象检测器在受约束设备上的性能。我们检查了Nvidia Jetson Nano和Nvidia Jetson Agx Xavier的功能;低功率,高性能计算机,具有集成的GPU,足够小,可以在板载纳米卫星上装配。我们仔细研究了对象检测网络,包括单镜头多伯克斯检测器(SSD)和基于区域的完全卷积网络(R-FCN)模型,这些模型已在DOTA上进行了预训练 - 在空中图像中用于对象检测的大型数据集。性能是根据执行时间,内存消耗和准确性来衡量的,并与包含具有两个功能强大GPU的服务器的基线进行比较。结果表明,通过应用图像压缩技术,我们能够改善执行时间和内存消耗,从而实现完全可运行的数据集。无损压缩技术的执行时间大约减少了10%,记忆消耗降低了3%,对准确性没有影响。虽然有损耗的压缩技术将执行时间提高了144%,并且记忆消耗减少多达97%。但是,它对准确性有重大影响,具体取决于压缩比。因此,这些压缩技术的应用和比率可能会根据特定任务所需的准确性水平而定。

cv
对CVPR SOTA的准确性提高。纽约顾问,纽约及纽约的3D高斯剥落:霍姆·孙教授,人民大学和哥伦比亚大学哥伦比亚大学Changxi Zheng教授,2024年8月 - 目前•设计的物理学深度神经网络可从纯粹的视觉监督下自动估算,以推断出可比较的范围: BIM Model Reconstruction System (Bachelor Thesis Project with $15000 founding) Ningbo, CN Advisor: Prof. Adam Rushworth, University of Nottingham, Ningbo Jun 2021 – Jul 2022 • Designed and prototyped a novel autonomous mobile robot system for Building Information Modeling (BIM) • Built modular hardware stack with multi-modal sensors, Jetson Xavier AGX computing unit, and robust power & signal系统•构建了一个完整的基于ROS的软件堆栈,包括乌尔德设计,低级控制,凉亭仿真,基于激光雷达纽约顾问,纽约及纽约的3D高斯剥落:霍姆·孙教授,人民大学和哥伦比亚大学哥伦比亚大学Changxi Zheng教授,2024年8月 - 目前•设计的物理学深度神经网络可从纯粹的视觉监督下自动估算,以推断出可比较的范围: BIM Model Reconstruction System (Bachelor Thesis Project with $15000 founding) Ningbo, CN Advisor: Prof. Adam Rushworth, University of Nottingham, Ningbo Jun 2021 – Jul 2022 • Designed and prototyped a novel autonomous mobile robot system for Building Information Modeling (BIM) • Built modular hardware stack with multi-modal sensors, Jetson Xavier AGX computing unit, and robust power & signal系统•构建了一个完整的基于ROS的软件堆栈,包括乌尔德设计,低级控制,凉亭仿真,基于激光雷达

全新边缘AI系统塑造未来
体验用华硕IoT的最新边缘AI计算机系列重新定义的边缘计算的功能。配备了14th GenIntel®Core™处理器,双PCIE X16 GPU支持,高达900 W TDP和DDR5 5600 SO-DIMM内存高达64 GB,这些系统可提供无与伦比的性能和能源效率,以实现强大的AI工作负载。具有用于Intel和Nvidia®Jetson平台的嵌入式MXM GPU模块,可实时推断AI推理,转换工厂自动化,机器视觉和自动驾驶汽车等行业。具有坚固,无风扇的设计,广泛的温度支持和低功耗,ASUS IoT系统可确保最苛刻的边缘AI应用程序的可靠性和效率。边缘AI系统
neurotecnología:interfaz cerebro-计算机yprotección...
室内定位是一个尚未有效,准确解决的问题。在室外最有效的解决方案是全球位置系统(GPS),但由于信号的减弱,无法在室内使用它,因此已经研究了其他解决方案。这些方法可用于定义盲人,旅游或自主机器人导航的指导的地图。在本文中,提出了强大的障碍检测和映射系统的研究,设计,实施和评估。因此,它可用于警报近对象的存在,并避免在室内导航中发生碰撞。该系统基于飞行时间(TOF)摄像头和单板计算机(SBC),例如Raspberry Pi或Nvidia Jetson Nano。为了评估系统,进行了一些实际的实验。这种系统可以集成在轮椅上,并帮助残障人士在室内移动或从室内环境中获取数据并在2D或3D图像中重新创建它。

soummen basu
•领域:计算机视觉,深度学习•论文:超声检查的基于深度学习的胆囊癌检测•获得了高度声望的总理研究奖学金(授予印度前10名国家研究所的3.5%的博士学位学生)•开创了第一个基于AI的Gallbladder Cancel(GBC)检测模型(US)的CVPR 2022222.•通过基于AI的早期检测,创新的GBC检测的精确,高效且可解释的模型 - 将5年生存率从5%提高到57%。•发表在CVPR,MICCAI,医学图像分析和柳叶刀区域健康等高影响力国际场所发表。•在印度多家医院的物联网设备(Jetson)上设计了云应用程序原型和部署的模型,以实时临床测试。•计算机视觉,ML,数据结构课程的助教。获得了机器学习课程的杰出助教奖。

使用MM-Wave Radar在车辆中监视生命体征...
近年来,雷达传感器和机器学习的结合改变了生命体征监测,尤其是在医疗保健和汽车行业。本研究使用车辆中的MMWave雷达技术来监视生命体征,这解决了诸如驾驶员疲倦之类的问题。与机器学习集成时,该技术在诸如患者护理设施和车辆舱的设置中提供了非侵入性,保护隐私的生理监测解决方案,同时仍在苛刻的环境中有效地执行。机器学习通过处理大量传感器数据来提高基于雷达的监视的准确性,但是在诸如车辆之类的嘈杂情况下保持精确度很难。本研究通过正确监视驾驶员和乘客来解决这些问题(Ahmed&Cho,2024)。本演示文稿讨论了硬件限制,实施的解决方案以及与生命体征获取有关的当前软件问题。诸如高斯噪声添加和生成对抗网络(GAN)之类的技术可以提高收集的数据集的准确性和可靠性。自动编码器比Kalman过滤器(例如Kalman过滤器)优选,因为它们可以有效地解决非线性问题并消除噪音和背景。机器学习方法,例如卷积神经网络(CNN)和自校准的长期短期记忆(LSTM),在各种环境条件下对特征提取更有效(Zheng等,2021)。关键字生命体征监视 - MM波雷达 - 机器学习参考Ahmed,S。,&Cho,S。H.(2024)。传统的自回旋模型对噪声敏感,因此,建议使用诸如时间卷积网络(TCN)之类的机器学习方法来进行信号处理,实时生命体征记录以及无连接传感器而重建心率变异性。研究团队利用了雷达和图形处理机(例如雷森·纳米(Jetson Nano))等尖端硬件解决方案(例如雷森·纳米(Jetson Nano))来应对实时机器学习的挑战(Zhang等,2022)。医疗保健雷达的机器学习:人类生命体征测量和活动识别的最新进展。IEEE通信调查与教程,26(1),461-495。 https://doi.org/10.1109/comst.2023.3334269IEEE通信调查与教程,26(1),461-495。 https://doi.org/10.1109/comst.2023.3334269

开源面孔感知捕获系统
摘要:质量不佳的面部图像在生物识别身份验证中构成了挑战,尤其是在通过照片获取和识别中。本研究提出了一种新颖的开源解决方案,通过在低功率单板计算机上使用计算机视觉技术引入实时面部图像质量分析来解决这些问题。我们提供了一个开源完整的硬件解决方案,该解决方案由Jetson处理器,16 MP Autocus RGB相机,自定义外壳和用于用户交互的触摸传感器LCD组成。为了确保捕获的面部数据的完整性和机密性,高级加密标准(AES)用于安全图像存储。使用Pilot数据收集,该系统证明了其捕获高质量图像的能力,在存储可接受质量的图像时达到了98.98%的精度。此开源,容易部署,安全系统为各种实时应用程序(例如护照验证,安全系统等)提供了有希望的潜力。
Guihua Wang 实时的表面识别系统,用于可变的双头机器人步行速度 lcnet.pdf-科学技术学院
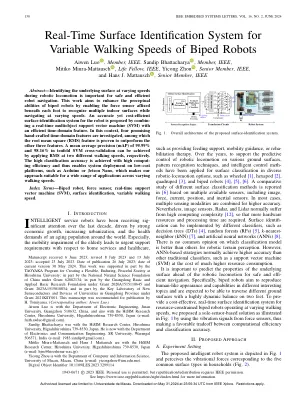
摘要 - 在机器人运动过程中以不同速度识别基础表面对于安全有效的机器人导航很重要。这项工作旨在通过在每脚下方固定的力传感器来识别多个室内表面,同时以不同的速度导航,从而增强了双子机器人的感知能力。通过将实时多对象支持向量机(SVM)与有效的时域功能相结合,提出了一种机器人的准确但成本较固的表面标识系统。在这种情况下,研究了四个有希望的手工制作的时域特征,其中均方根(RMS)功能被证明超过了其他三个功能。可以通过分别以两个不同的步行速度应用RMS来实现十倍SVM交叉验证中95.99%和98.16%的平均平均精度(地图)。具有较高的计算效率可以实现高分类精度,因此可以在诸如Arduino或Jetson Nano之类的低成本平台上进行系统部署,这使我们的方法适合在各种步行速度之间进行广泛应用。
量子系统在乌克兰部署“受体AI”
慕尼黑,德国,2024年7月12日 - QumbH的QumbH pripermers在乌克兰的“受体AI”类型的先前未发行的AI传感器升级的部署。新的升级套件是基于Jetson Orin Nvidia芯片和矢量侦察无人机的几个传感器。进一步的开发可以在白天和晚上,可见性条件下以及自动化的AI支持的对象识别和识别中实现光学导航。在电子战时,在GNSS贬低的条件下导航,导航是使用无人机的最大挑战。新的量子系统升级为侦察无人机的信号无关定位提供了进一步的选择,并从根本上改善了其在GNSS贬值条件下的使用。该公司最近在乌克兰开放的开发网站进行了测试并进一步开发。“受体AI”可以通过红外支撑的视觉导航在晚上和恶劣天气下实现自主权。对象传感器技术也得到了显着改进。硬件和软件升级现在可以更好地检测对象检测,分类,识别和跟踪对象。