XiaoMi-AI文件搜索系统
World File Search SystemJitter
哈勃太空望远镜 - 天体物理科学部
5 哈勃太空望远镜系统 5-1 5.1 支持系统模块 5-2 5.1.1 结构和机制子系统 5-2 5.1.2 仪器和通信子系统 5-7 5.1.3 数据管理子系统 5-8 5.1.4 指向控制子系统 5-10 5.1.5 电力子系统 5-14 5.1.6 热控制 5-16 5.1.7 安全(应急)系统 5-16 5.2 光学望远镜组件 5-18 5.2.1 主镜组件和球面像差 5-19 5.2.2 次镜组件 5-23 5.2.3 焦平面结构组件 5-24 5.2.4 OTA 设备部分 5-24 5.3 精细制导传感器 5-25 5.3.1 精细制导传感器组成和功能 5-25 5.3.2 铰接镜系统 5-27 5.4 太阳能电池阵列和抖动问题 5-27 5.4.1 配置 5-27 5.4.2 太阳能电池阵列子系统 5-28 5.4.3 维修任务 3A 的太阳能电池阵列配置 5-29 5.5 科学仪器控制和数据处理单元 5-29 5.5.1 组件 5-29 5.5.2 操作 5-30 5.6 空间支持设备 5-31 5.6.1 飞行支持系统 5-32 5.6.2 轨道替换单元运载器 5-33 5.6.3 机组辅助设备 5-35

飞机对地面剖面测量:湍流测量和光学系统性能建模
一系列飞行试验展示出一种测量空对地倾斜路径上路径分辨光学湍流量(如 C 2 n)的新方法。本文介绍了数据采集试验,试验涉及两束激光束在 8 公里倾斜路径上在一个轨道空中平台和一个静止地面终端之间传播。地面和飞行中的测量数据同时收集,并使用差分倾斜方差 (DDTV) 技术计算 C 2 n 剖面。本文介绍了 DDTV 技术,该技术能够对湍流强度进行路径分辨测量,从而得到 C 2 n 剖面。得到的湍流剖面揭示了最靠近飞机的统计数据中被认为是来自飞机边界层的气动光学污染。因此,气动光学环境的污染可以相对于其余大气传播路径进行量化。最后,本文介绍了将测量的大气湍流剖面与最先进的大气模型进行比较的分析。这些分析超越了 C 2 n 比较,并展示了测量与建模在关键定向能系统传播参数方面的比较,例如格林伍德频率、相干直径、里托夫数、等晕角、泰勒频率、开环抖动和开环斯特列尔比。在空对地和地对空定向能系统的背景下分析了斜路径湍流。

定向能武器是真实存在的……而且具有破坏性
定向能武器的破坏力(杀伤力)来自随着时间的推移传递给目标的能量。这种集中的能量可以对从非致命到致命的整个范围产生影响。例如,激光可以在几秒钟内切割钢、铝和许多其他材料。它们可以非常有效地导致加压容器爆炸,例如导弹推进剂和氧化剂罐。它们可以摧毁、降级或致盲许多其他包含传感器和电子设备的系统。对于高能激光,杀伤力取决于激光的功率输出、光的纯度和浓度(光束质量)、目标范围、将激光保持在目标瞄准点上的能力(抖动控制和跟踪)以及激光穿越目标的大气环境。在最后一个因素中,激光的频率和交战高度将对大气对激光杀伤力的影响程度产生重大影响。激光能量可以以连续波或脉冲形式产生,这也会影响其杀伤力。高能激光器 (HEL) 的平均功率范围从几千瓦到兆瓦。高功率微波 (HPM) 和高功率毫米波武器发射的电磁能量束通常从大约 10 兆赫到 100 千兆赫的频率范围。像激光一样,
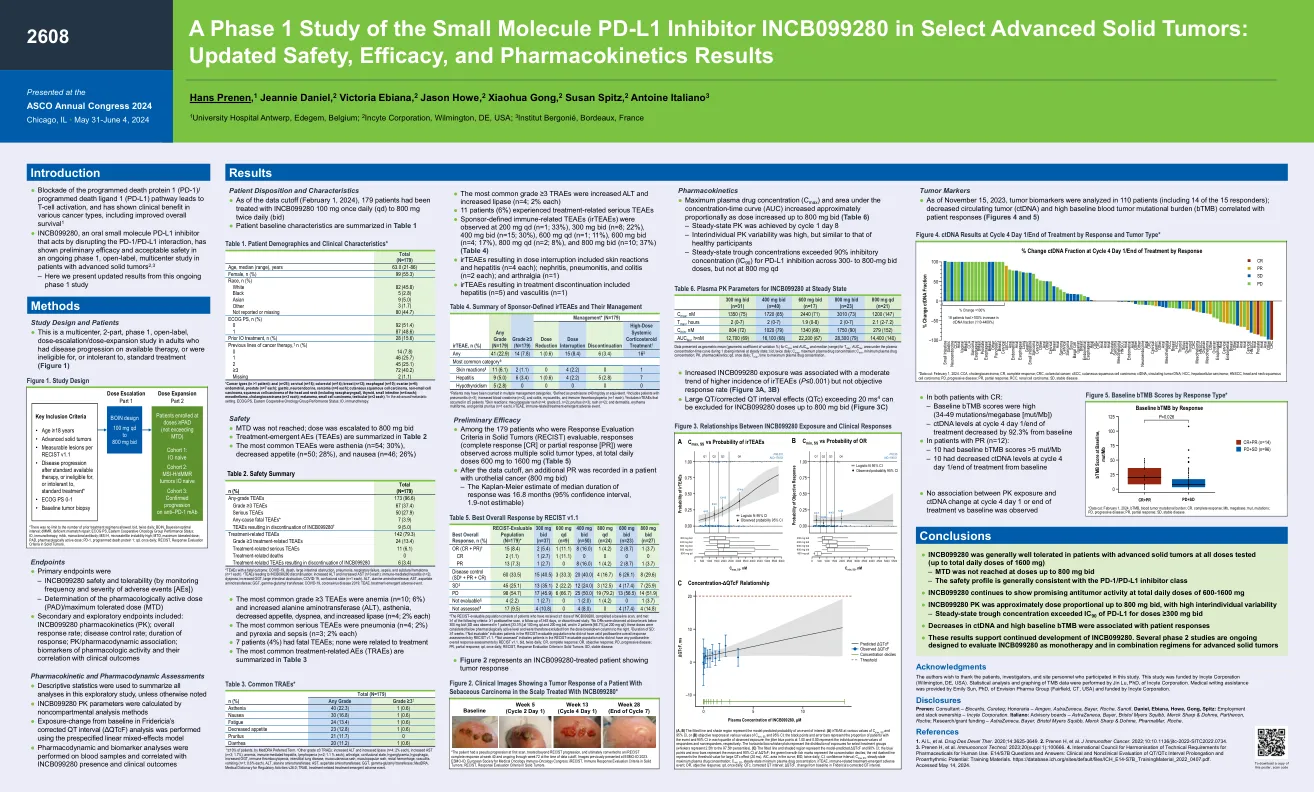
ASCO 2024 -INCB099280在Advanced Solid ...
(a,b)拟合线和阴影区域表示感兴趣的事件的模型预测的概率:(a)在C Max,Ss和95%CI的各种值下的IRTEAE,或(B)在C Min,SS和95%CI的各种值下的客观响应;黑点和误差条代表了该事件患者的比例,在观察到的每个四分位数中,都代表了95%CI; 1.00和0.00的抖动蓝点分别代表响应者和非反应者的个体暴露值。水平盒旋风图表示精选治疗组暴露的分布(晶须代表第2.5%至第97.5个百分位数)。(c)拟合线和阴影区域代表模型预测的ΔQTCF和90%CI;蓝点和误差线代表ΔQTCF的平均值和90%CI;带有刻度标记的绿线代表浓度十分位;红色虚线表示大QTC效应的阈值(20 ms)。aic,曲线中的区域;出价,每天两次; CI,置信区间; C Max,SS,稳态最大等离子体药物浓度; C min,ss,稳态最低血浆药物浓度; IRTEAE,与免疫相关的治疗伴随不良事件;或者,客观响应; QD,每天一次; QTC,校正的QT间隔; ΔQTCF,从Fridericia校正的QT间隔中的基线变化。

高速输入输出系统的占空比检测方法
Karen MELIKYAN 亚美尼亚国立理工大学 (NPUA) 摘要:本文介绍了一种用于高速输入输出的时钟耦合占空比检测方法。在高速系统中,输出信号的占空比 (DC) 需要校准为 50% 才能在系统中获得可接受的性能。所提出的方法在系统输出中引入一个同步信号,占空比为 50%,最大工艺、电压和温度 (PVT) 误差为 1%。所提出的方法还补偿了 DC 检测器的输入参考偏移,这有助于提高整体系统性能。占空比检测方法采用 16nm 技术实现,电源为 1.2V。采用这种设计的架构,电路可以提供高达 5Gbps 频率的数据信号。实验结果表明,所提出的架构可靠,并且可以在高频间隔内工作。所提出的电路可以在多种标准的特殊串行链路中实现,例如外围组件互连 (PCI)、通用串行总线 (USB) 和双倍数据速率 (DDR)。关键词:占空比、检测器、高速、校准、工艺电压温度 (PVT) 简介 许多系统的速度逐年提高。DDR 系统就是其中之一 (Wang, 2015)(图 1)。在这些系统中提供良好的性能变得更加困难。因此,出现了参数问题,例如直流失真、偏移、抖动等。

基于图形神经网络的灵活在线路由
abtract的深入增强学习(DRL)已被广泛用于寻找最佳路由方案,以满足用户的各种需求。但是,DRL的优化目标通常是静态的,因为网络环境是动态的。交通环境的变化或净工作设备的重新配置通常会导致网络性能的定期变化(例如,吞吐量降低和潜伏期峰)。传统的静态目标配置不能反映动态净工作环境中不同指标的重要性差异,从而导致基于DRL的路由算法的僵化性。为了解决上述问题,我们建议使用Graph神经网络(GNNS)和DRL的在线路由优化算法优化。通过对网络的不同特征(例如路径,流和链接)之间的关系进行建模和理解,我们提出的GNN模型可以预测网络性能指标的未来开发(即延迟,吞吐量和丢失),从而迅速调整路由算法的目标。然后,使用我们提出的DRL模型,代理可以学习适应不同环境变化的最佳途径。我们在控制平面上实现了G路线甲基元素,并使用现实世界网络拓扑和流量数据执行模拟实验。实验结果表明,当网络环境发生重大变化时,我们提出的G路线会收敛得更快,达到较低的抖动并生成更可靠的路由方案。

6G 增强型超高速机器学习
摘要 超可靠低延迟通信(URLLC)作为第五代(5G)和第六代(6G)蜂窝网络的主要通信服务之一,对于支持各种新兴的关键任务应用至关重要。然而,现代移动网络无法满足延迟和可靠性要求,以及其他服务质量(QoS)要求,包括频谱效率、能源效率、容量、抖动、往返延迟、网络覆盖等。为了满足各种URLLC应用的不同QoS要求,机器学习(ML)解决方案有望成为未来6G网络的主流。在本文中,我们首先将6G URLLC愿景分为三种连接特征,包括无处不在的连接、深度连接和全息连接,以及它们对应的独特QoS要求。然后,我们确定了满足这些连接要求的潜在挑战,并研究有前景的ML解决方案,以实现6G URLLC服务的智能连接。我们进一步讨论了如何实现机器学习算法来保证不同 URLLC 场景(包括移动性 URLLC、大规模 URLLC 和宽带 URLLC)的 QoS 要求。最后,我们给出了一个下行 URLLC 信道接入问题的案例研究,分别通过集中式深度强化学习 (CDRL) 和联邦式深度强化学习 (FDRL) 来解决,验证了机器学习对 URLLC 服务的有效性。

通过与CBS和TAS
摘要本文评估了基于以太网的车载网的QoS,该网络净 - 具有异步的型号型成型(ATS),基于信用的改造器(CBS)和Train-traw of Awarce Asise Arine Shaper(TAS),这些QOS控制在IEEE 802.1TSN(时间敏感网络)中定义了QOS控制;通过实验;然后,它比较了其中的QoS。由于ECU的数量正在增加并朝着实现全自动车辆的实现,因此正在引入以太网发送它们。此外,由于正在部署基于以太网的车载网络,因此也考虑了IEEE 802.1TSN。al-尽管许多研究已经评估了QoS对照,例如CBS和TAS,但很少有对QoS的研究提供了在车内网络上的ATS。因此,Authors评估了ATS的QoS,然后通过两个实验将ATS与其他QoS对照进行比较。一个评估基本QoS,另一个评估了实际用例。实验结果表明,当框架间隔宽且大小较大时,ATS可以抑制最大延迟和框架损失,而在车辆内网络上大小较大。此外,他们还指出,ATS可以通过降低最大停留时间来减少框架损失率时的最大延迟和延迟抖动。因此,如果对延迟的要求比框架损失更重要,则最好采用ATS。关键字:IEEE 802.1TSN,车载以太网,QoS,异步造型型塑形,基于信用的塑造器,时间吸引时间的变形器分类:网络系统
![arxiv:2401.07265v1 [Quant-ph] 2024年1月14日](/simg/e\e05524124b2b8b2904bd1be7db3d54b5351cdf19.webp)
arxiv:2401.07265v1 [Quant-ph] 2024年1月14日
摘要:自2001年首次示威[1]以来,超导纳米线单光子探测器(SNSPDS)见证了二十年的伟大发展。SNSPD是大多数现代量子光学实验中的选择检测器,并且正在慢慢地进入其他光子含有光学的光学领域。到目前为止,在几乎所有实验中,SNSPD都被用作“二进制”检测器,这意味着它们只能区分0和> = 1个光子,而光子数信息则丢失。最近的研究工作证明了原理证明光子数分辨率(PNR)SNSPD,计数2-5个光子。在各种量子式实验中,高度要求光子数分解的能力,包括Hong – Ou-Mandel干扰,光子量子计算,量子通信和非高斯量子态制备。尤其是,由于高质量的半导体量子点(QDS)[2]和高性能的基于邻峰的量子记忆,波长850-950 nm处的PNR检测器引起了极大的关注[3]。在本文中,我们演示了基于NBTIN的SNSPD,具有> 94%的系统检测效率,一个光子的低于11 PS的时间抖动,以及2 photon的Sub-7 PS。更重要的是,我们的探测器使用常规的低温电读数电路最多可以解决7个光子。通过理论分析,我们表明,通过提高读出电路的信噪比和带宽,仍可以进一步改善检测器的当前PNR性能。我们的结果对于光学量子计算和量子通信的未来都是有希望的。

实时系统的容错策略和概率保证
嵌入式系统的广泛部署对我们的社会产生了重大影响,因为它们在许多关键的实时应用中与我们的生活相互作用。通常,用于安全或任务关键型应用(例如航空航天、航空电子、汽车或核领域)的嵌入式系统在恶劣的环境中工作,在这些环境中,它们会频繁遭受瞬态故障,例如电源抖动、网络噪声和辐射。它们还容易受到设计和生产故障导致的错误的影响。因此,它们的设计目标是即使在发生错误的情况下也能保持及时性和功能正确性。容错对于实现可靠性起着至关重要的作用,而设计有效和高效的容错机制的基本要求是潜在故障及其表现的现实和适用模型。在这种情况下需要考虑的一个重要因素是故障和错误的随机性,如果在时序分析中通过假设严格的最坏情况发生场景来解决这些问题,可能会导致不准确的结果。同样重要的是,通过有效利用可用资源实现容错,解决嵌入式系统的功率、重量、空间和成本限制。本论文提出了一个框架,用于设计可预测的可靠嵌入式实时系统,同时解决及时性和可靠性问题。它提出了一系列容错策略,特别是针对嵌入式实时系统。通过考虑系统构建块的不同关键性级别,可以实现高效的资源利用。容错策略与所提出的概率可调度性分析技术相辅相成,这些技术基于全面的随机故障和错误模型。