XiaoMi-AI文件搜索系统
World File Search SystemKalman

产品描述 Leica IPAS20
提供机载传感器数据的直接地理参考 Leica IPAS20 通过严格的卡尔曼滤波器将精确的 GNSS 解决方案与原始 IMU 测量相结合。Leica IPAS20 提供的 IMU 基于光纤、环形激光或干调陀螺仪技术。每种 IMU 类型都以高数据速率(从 200Hz 到 500Hz)测量精确的速度增量和角度增量。Leica IPAS20 将 IMU 测量的出色短期精度与 GPS 解决方案的长期稳定性相结合,在整个任务期间产生高度精确的位置、速度和方向。卡尔曼滤波器将同时估计来自加速度计和陀螺仪的误差。Leica IPAS20 还可以估计 GNSS 天线和传感器参考中心之间的杠杆臂。估计的实时解决方案(包括位置、速度和滚动、俯仰和航向)可用于飞行管理,也可用于控制其他传感器。滚动、俯仰和航向可以作为稳定支架(如 Leica PAV30)的数字信号输出,以提高支架的精度。或者,它们可以作为模拟信号输出以控制其他传感器功能,例如 Leica ALS50 激光扫描仪的滚动补偿。灵活且可扩展的机载系统 Leica IPAS20 系统由 Leica IPAS20 控制单元和集成的 GNSS 接收板、GNSS 天线、IMU 和软件组成。该系统专为所有类型的机载传感器而设计:

融合算法启用的电动汽车电池的电荷估计,考虑到极端温度
使用扩展的Kalman滤波器(EKF)来估计锂离子电池(LIBS)的电荷状态(SOC),系统的噪声协方差矩阵和能量收集器的观察声音大多是随机给出的,这使得无法优化噪声问题。这会导致SOC估计的准确性和稳定性较低。为解决这些问题,提出了一种基于长期短期记忆 - 自适应的无知的卡尔曼滤波器(LSTM – AUKF)融合的方法来提高估计Libs Soc的准确性和稳定性。首先,从混合脉冲功率表征(HPPC)实验数据中鉴定出Thevenin模型的离线参数。然后,为电源LIB构建了SOC估计窗口的LSTM结构,并且电池SOC训练网络是通过电池电流,电压,温度和历史数据实时预测的。最后,设计了估计权力液体SOC的AUKF算法,然后提出了融合策略。实验验证表明,用于估计研究窗口中LSTM -AUKF混合动力锂电池的均方根平方误差(RMSE),最大(最大)和平均绝对误差(MAE)分别为1.13、1.74和0.39%。与窗口LSTM网络相比,融合算法提高了SOC估计功率LIB的准确性和稳定性。
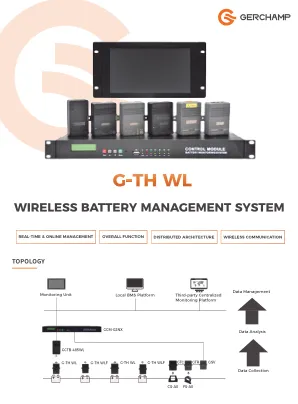
g-th WL无线电池管理系统
自己的在线参数IDENɵFIFICA,充电的自我处理,没有跳跃,这使所有工作condiɵ子的SOC错误不超过5%,因此改善了baʃeryuɵlizaɵonraɵo和操作。请参阅各种算法的优点,例如KalmanFulter,Mulɵ-Dimension- Al,模糊网络神经和开路电压方法。提供高准确性的socsocɵmaɵon,将传统的BMS的SOC准确性从±20%提高到±5%。

电池电量电路电压曲线的实时状态电池状态估计
摘要 - 基于等效电路模型(ECM)估计开路电压(OCV)的所有电荷状态(SOC)估计算法,并使用SOC-OCV非线性关系将其转换为SOC。这些算法需要识别ECM参数和非线性SOC-OCV关系。在文献中,提出了各种技术来同时识别ECM参数。然而,SOC-OCV关系的同时同时鉴定仍然具有挑战性。本文提出了一种构建SOC-OCV关系的新技术,最终将其转换为单个参数估计问题。使用拟议的参数估计和SOC-OCV构建技术实施了Kalman过滤器,以估算电池中的SOC和相关状态。在数值模拟中,该算法证明它准确地估计了电池模型参数,并且SOC估计误差仍低于2%。我们还通过电池实验验证了所提出的算法。实验结果表明,SOC估计的误差保持在2.5%以内。

CheetahNAV 数据表 - 惯性实验室
这款多功能战术导航系统利用实时移动地图技术,持续为驾驶员和机组人员提供准确的态势感知信息。CheetahNAV 具有用户友好的图形导航功能,结合惯性和卫星位置信息,可在预设航点之间准确导航至目的地。CheetahNAV 使用先进的惯性导航系统 (INS),该系统由加速度计和陀螺仪等多种辅助设备组成,使用先进的卡尔曼滤波器算法提供平台的准确位置、速度、航向、俯仰和横滚。

使用MM-Wave Radar在车辆中监视生命体征...
近年来,雷达传感器和机器学习的结合改变了生命体征监测,尤其是在医疗保健和汽车行业。本研究使用车辆中的MMWave雷达技术来监视生命体征,这解决了诸如驾驶员疲倦之类的问题。与机器学习集成时,该技术在诸如患者护理设施和车辆舱的设置中提供了非侵入性,保护隐私的生理监测解决方案,同时仍在苛刻的环境中有效地执行。机器学习通过处理大量传感器数据来提高基于雷达的监视的准确性,但是在诸如车辆之类的嘈杂情况下保持精确度很难。本研究通过正确监视驾驶员和乘客来解决这些问题(Ahmed&Cho,2024)。本演示文稿讨论了硬件限制,实施的解决方案以及与生命体征获取有关的当前软件问题。诸如高斯噪声添加和生成对抗网络(GAN)之类的技术可以提高收集的数据集的准确性和可靠性。自动编码器比Kalman过滤器(例如Kalman过滤器)优选,因为它们可以有效地解决非线性问题并消除噪音和背景。机器学习方法,例如卷积神经网络(CNN)和自校准的长期短期记忆(LSTM),在各种环境条件下对特征提取更有效(Zheng等,2021)。关键字生命体征监视 - MM波雷达 - 机器学习参考Ahmed,S。,&Cho,S。H.(2024)。传统的自回旋模型对噪声敏感,因此,建议使用诸如时间卷积网络(TCN)之类的机器学习方法来进行信号处理,实时生命体征记录以及无连接传感器而重建心率变异性。研究团队利用了雷达和图形处理机(例如雷森·纳米(Jetson Nano))等尖端硬件解决方案(例如雷森·纳米(Jetson Nano))来应对实时机器学习的挑战(Zhang等,2022)。医疗保健雷达的机器学习:人类生命体征测量和活动识别的最新进展。IEEE通信调查与教程,26(1),461-495。 https://doi.org/10.1109/comst.2023.3334269IEEE通信调查与教程,26(1),461-495。 https://doi.org/10.1109/comst.2023.3334269

使用带有卡尔曼滤波器的周期性干扰观察器进行 EEG 监测......
摘要:运动想象 (MI) 具有频率特异性特征,是基于脑电图 (EEG) 的脑机接口识别操作员意图的范例之一。从理论上讲,在传统方法中很难在不产生很大延迟的情况下提取频率特异性特征。在本文中,我们尝试使用带有卡尔曼滤波器的周期性扰动观测器快速检测 alpha 和 beta 波段幅度。对原始 EEG 信号的响应表明,周期性扰动观测器可以比带通滤波器更快地提取 MI 的特征。

利用量子算法重建粒子轨迹
摘要:准确确定粒子径迹重建参数将成为高亮度大型强子对撞机 (HL-LHC) 实验面临的主要挑战。HL-LHC 同时发生的碰撞数量预计会增加,探测器占用率也会随之提高,这将使径迹重建算法对时间和计算资源的要求极高。命中次数的增加将增加径迹重建算法的复杂性。此外,由于探测器的分辨率有限以及命中的物理“接近度”,将命中分配给粒子径迹的模糊性也会增加。因此,带电粒子径迹的重建将成为正确解释 HL-LHC 数据的主要挑战。目前使用的大多数方法都基于卡尔曼滤波器,这些滤波器被证明是稳健的,并提供良好的物理性能。但是,它们的扩展性预计会比二次方差。设计一种能够在命中级别减少组合背景的算法,将为卡尔曼滤波器提供更“干净”的初始种子,从而大大减少总处理时间。量子计算机的显着特征之一是能够同时评估大量状态,使其成为在大型参数空间中进行搜索的理想工具。事实上,不同的研发计划正在探索量子跟踪算法如何利用这些功能。在本文中,我们介绍了我们在实现基于量子的轨迹查找算法方面的工作,该算法旨在减少初始播种阶段的组合背景。我们使用为 kaggle TrackML 挑战设计的公开数据集。
![arXiv:2003.08126v1 [quant-ph] 2020 年 3 月 18 日](/simg/c\c6d01874017c7d6f6947dc0a7a998c392e725488.webp)
arXiv:2003.08126v1 [quant-ph] 2020 年 3 月 18 日
摘要:准确确定粒子径迹重建参数将成为高亮度大型强子对撞机 (HL-LHC) 实验面临的主要挑战。HL-LHC 同时发生的碰撞数量预计会增加,探测器占用率也会随之提高,这将使径迹重建算法对时间和计算资源的要求变得极为苛刻。撞击数量的增加将增加径迹重建算法的复杂性。此外,由于探测器的分辨率有限以及撞击的物理“接近度”,将撞击分配给粒子径迹的模糊性也会增加。因此,带电粒子径迹的重建将成为正确解释 HL-LHC 数据的主要挑战。目前使用的大多数方法都基于卡尔曼滤波器,这些滤波器被证明是稳健的,并能提供良好的物理性能。然而,它们的扩展性预计会比二次方差。设计一种能够在命中级别减少组合背景的算法,将为卡尔曼滤波器提供更“干净”的初始种子,从而大大减少总处理时间。量子计算机的显着特征之一是能够同时评估大量状态,使其成为在大型参数空间中进行搜索的理想工具。事实上,不同的研发计划正在探索量子跟踪算法如何利用这些功能。在本文中,我们介绍了我们在实现基于量子的轨迹查找算法方面的工作,该算法旨在减少初始播种阶段的组合背景。我们使用为 kaggle TrackML 挑战设计的公开数据集。
M.Sc.物理课程内容 附件i
数据的统计分析:随机变量;概率和概率分布的原则;假设检验的基本概念;平均值的标准误差;置信区间;曲线拟合;精确测试拟合优度;功率分析;卡方测试拟合优度; G-Test拟合优度;卡方独立性测试;独立的G检验;学生的t检验用于一个样本;学生的t检验,用于两个样本;配对t检验; Wilcoxon签名式测试;相关和线性回归;斯皮尔曼的等级相关;多重回归;卡尔曼过滤器;这些统计测试的动手python培训