XiaoMi-AI文件搜索系统
World File Search SystemLIDAR
中美新兴技术领域的竞争:激光雷达
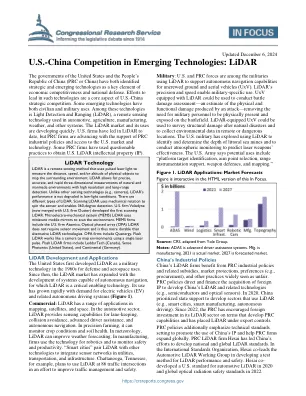
美国政府和中华人民共和国政府都将战略性和新兴技术视为经济竞争力和国防的关键要素。争取在这些技术领域占据领先地位是中美战略竞争的核心方面。一些新兴技术既有民用用途,也有军用用途。这些技术中包括光检测和测距 (LiDAR),这是一种用于汽车、农业、制造、气象和其他系统的遥感技术。LiDAR 市场及其用途正在迅速发展。迄今为止,美国公司在 LiDAR 领域处于领先地位,但中国公司在中国产业政策的支持以及美国市场和技术的准入下也取得了进展。一些中国公司使用可疑的做法来获取美国 LiDAR 知识产权 (IP)。

特刊 - 激光雷达的大气应用
使用激光束在1960年由T. Maiman发明激光后不久就会发出大气。在整个大气中,气溶胶的观察和表征随着复杂性的日益激增而普遍,现在经常整合到网络中。2006年发射了云 - 大气圈激光雷达和红外探路者卫星观察(卡利皮),仍在绕地球绕。LIDAR气溶胶观测值现在用于空气质量的预测。多普勒激光雷达,以观察较低或更高大气中的风场。现在,它们已商业可用,并在世界各地广泛部署了风能行业,机场的监视等。LIDAR,用于测量温度,湿度,大气中气态成分的浓度,设想用于太空任务的垂直轮廓,并得益于激光和探测器技术的进展。特刊将试图概述LiDAR技术和科学的最新发展以及观察大气的工业应用。

沿海弹性和拉曼激光雷达测深
本文概述了空气中的海洋激光雷达性能和带有多个散射的激光雷达回报的基本半分析理论的准实时计算机模拟软件AOLS(机载海洋激光雷达模拟器)。该模型在带有极化设备以及拉曼和荧光通道的弹性激光雷达中提供了信号。模型数据与Hycode 2001现场测试所提供的实验数据非常好地比较。提出的模型不仅是预测和优化海洋机载激光雷达的性能,而且是开发和验证检索技术的强大工具。显示了具有多个散射的LiDAR方程的分析反转,并且显示了具有多个散射的LiDAR剖面反转的第一个进步。

激光雷达联盟希望实现自动驾驶突破
沃尔沃汽车和芬兰高端增强现实耳机制造商 Varjo 共同创建了一种混合现实方法来评估原型、设计和主动安全技术。沃尔沃汽车技术基金决定投资 Varjo,这将进一步加强双方的合作。沃尔沃和 Varjo 已经实现了佩戴混合现实耳机驾驶真实汽车,无缝添加虚拟元素或完整功能,这些功能对驾驶员和汽车传感器来说都是真实的,用于开发目的。Varjo XR-1 耳机以高分辨率提供逼真的混合或虚拟现实。它使用高清摄像头并实现混合现实。这使设计师和工程师能够驾驶未来的汽车并在模拟环境中评估所有功能,而这些功能早在它们问世多年前就已存在。安全专家可以在沃尔沃位于瑞典的研究机构佩戴耳机驾驶真实汽车,测试通过增强现实在现实环境中实施的虚拟主动安全系统。XR-1 中嵌入的眼动追踪技术可以评估驾驶员如何使用新功能以及他们是否分心。

海上运输安全和...中的激光雷达测量
I. 引言 如今,LiDAR(光探测和测距)被广泛用于检查大气的各种特性、自动驾驶以及测绘和地形等许多其他方面。如今,LiDAR 在自动驾驶方面的可能性正在高度发展,但如果我们考虑其他类型的交通,如远洋运输或一般的运输和导航,我们就会发现它还没有得到充分的开发和利用,无法满足更安全的运输需求。这个话题可能被忽视,因为水下使用存在局限性,与 LiDAR 在大气和地球表面的使用相比,这似乎导致了更多有关其发展的问题。本文讨论了如何使用 LiDAR 造福航运、导航、自主导航、当前天气测量和检测,并提出了一些建议。这项工作的范围是介绍 LiDAR 在航运中可以提供的多种用途,以及为深海海底和水下世界探测提出的整体解决方案。一些新的和不为人熟知的 LiDAR 用途可能会在许多方面改变未来,对此,我们进行了一番思考。我想强调一下 LiDAR 在海岸线保护、深海海底物种、动物、藻类和其他水生植物以及海绵生物分析方面可能发挥的作用。此外,其中一个有趣的应用是检测水的盐度水平和分析水下矿物的化学性质。稍后,我们将提到 LiDAR 的更多应用及其优势,这些应用可以为人类带来更多关于水下世界的知识。
海上运输安全和...中的激光雷达测量
I. 引言 如今,LiDAR(光探测和测距)被广泛用于检查大气的各种特性、自动驾驶以及测绘和地形等许多其他方面。如今,LiDAR 在自动驾驶方面的可能性正在高度发展,但如果我们考虑其他类型的交通,如远洋运输或一般的运输和导航,我们就会发现它还没有得到充分的开发和利用,无法满足更安全的运输需求。这个话题可能被忽视,因为水下使用存在局限性,与 LiDAR 在大气和地球表面的使用相比,这似乎导致了更多有关其发展的问题。本文讨论了如何使用 LiDAR 造福航运、导航、自主导航、当前天气测量和检测,并提出了一些建议。这项工作的范围是介绍 LiDAR 在航运中可以提供的多种用途,以及为深海海底和水下世界探测提出的整体解决方案。一些新的和不为人熟知的 LiDAR 用途可能会在许多方面改变未来,对此,我们进行了一番思考。我想强调一下 LiDAR 在海岸线保护、深海海底物种、动物、藻类和其他水生植物以及海绵生物分析方面可能发挥的作用。此外,其中一个有趣的应用是检测水的盐度水平和分析水下矿物的化学性质。稍后,我们将提到 LiDAR 的更多应用及其优势,这些应用可以为人类带来更多关于水下世界的知识。

用于对流层臭氧监测的准分子激光雷达
摘要。预先指出了基于KRF和XECL准分子激光器的臭氧差异吸收激光雷达(DIAR),用于对流层中的白天和夜间测量。XECL激光用作“ OFF”波长发射极,而KRF激光的辐射在氢化代和氘池中被拉曼移位,以获得277 nm和292 nm“ ON”波长。用于范围0的测量值。5–4。5 km,使用了277 /308 nm,并且在4-10 km范围内使用了292 /308 nm。与弹性反向散射的同时,监测了氮气和水蒸气的XECL激光的拉曼反向散射。氮拉曼信号用于计算气溶胶反向散射和灭绝系数的计算,这些信号与Klett方法的结果与XECL弹性反向散射的结果进行了比较。获得的气溶胶纤维用于校正臭氧浓度。给出了LIDAR应用昼夜和季节性臭氧变化的一些例子。
海上运输安全和...中的激光雷达测量
I. 引言 如今,LiDAR(光探测和测距)被广泛用于检查大气的各种特性、自动驾驶以及测绘和地形等许多其他方面。如今,LiDAR 在自动驾驶方面的可能性正在高度发展,但如果我们考虑其他类型的交通,如远洋运输或一般的运输和导航,我们就会发现它还没有得到充分的开发和利用,无法满足更安全的运输需求。这个话题可能被忽视,因为水下使用存在局限性,与 LiDAR 在大气和地球表面的使用相比,这似乎导致了更多有关其发展的问题。本文讨论了如何使用 LiDAR 造福航运、导航、自主导航、当前天气测量和检测,并提出了一些建议。这项工作的范围是介绍 LiDAR 在航运中可以提供的多种用途,以及为深海海底和水下世界探测提出的整体解决方案。一些新的和不为人熟知的 LiDAR 用途可能会在许多方面改变未来,对此,我们进行了一番思考。我想强调一下 LiDAR 在海岸线保护、深海海底物种、动物、藻类和其他水生植物以及海绵生物分析方面可能发挥的作用。此外,其中一个有趣的应用是检测水的盐度水平和分析水下矿物的化学性质。稍后,我们将提到 LiDAR 的更多应用及其优势,这些应用可以为人类带来更多关于水下世界的知识。

使用LIDAR技术的自动驾驶汽车
电子邮件:1 pallavidakhore47@gmail.com,2 kiteymayuri@gmail.com,3 dipaktembhurne6763@gmail.com,4 chetanthobre214@gmail.com摘要:摘要:一项前进的技术已经不可能忽略了Autonomus车辆的工作。这些车辆从科学的好奇心转变为几年后的主流,很快我们将把它们视为街头的正常交通。自动驾驶车辆中的一个非常独特的组件是安装在车辆顶部的旋转激光雷达传感器。这是自动驾驶车辆的主要组件之一,因为它收集了有关周围区域的数据,以便导航系统安全地指导车辆。关键字:Arduino,LiDar,颜色传感器。1。简介该项目的主要目的是使用LiDAR提供自动驾驶汽车。想象一辆公共汽车自行运送乘客,驾驶比任何公共汽车司机都能做得更好。想象一下出租车,可以通过安装在智能手机中的应用程序来调用,该应用程序可以尽可能快,经济地将您带到目的地。想象一下独自致力于农业的车辆,而无需休息。想象车辆自己行驶,不仅在地球上,而且在宇宙中的任何岩石上绘制所有经历的地方。想象一下自己的汽车为您开车,而您不需要关心,而它的驱动力比以往任何时候都更好。想象一下在一个自主驱动的世界中的可能性。2。目标1。2。3.设计自动问题的定义通常称为自动驾驶汽车的自动驾驶汽车的开发和部署,由于其可能彻底改变运输系统的潜力,因此引起了极大的关注。LIDAR(光检测和范围)技术在使这些车辆能够导航和与环境互动中起着至关重要的作用。但是,与“使用激光雷达技术自动驱动的车辆”实施相关的挑战和问题领域存在一些挑战和问题领域。使用LIDAR技术设计自动驱动的车辆,以进行障碍物检测和避免。设计自动驱动车辆以进行监视和定位。

西伯利亚激光雷达站:仪器和结果
LIDAR设施的长期常规测量非常有效。测量数据的分析允许开发大气参数的经验模型;确定其季节性,准两年和其他定期变化周期;研究确定所测量参数之间的动态和相关性的原因;在自然和人为因素的作用下检测缓慢变化的短期大气干扰,最后,检测大气变化中趋势的检测和预测,并估计了它们对可能气候变化的影响。西伯利亚激光雷达站(SLS)是在V.E.创建的独特大气天文台。ZUEV大气光学研究所。它在Tomsk(56.5°N,85.0°E)中运行,并结合了用于远程激光的最新仪器和气溶胶和云场的被动声音,空气温度和湿度,以及臭氧环的臭氧和气态组件。除了控制广泛的大气参数外,天文台还允许同时监视整个有价值的高度范围0-75 km的大气。