XiaoMi-AI文件搜索系统
World File Search SystemLQ
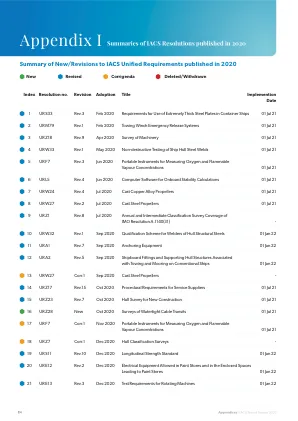
2020 年发布的 IACS 统一要求新内容/修订内容摘要
8, 6& SURYLGHV LQWHUSUHWDWLRQ RI UHTXLUHPHQWV IRU VXUYLYDO FUDIW DQG UHVFXH ERDW FRPPXQLFDWLRQV FDSDELOLWLHV IRU VKLSV LQWHQGHG WR RSHUDKHWHWH LXWHV LXWHV3 RODU ZDWHUV VWLSXODWHG LQ 3RODU &RGH 5HV 06& LQFOXGLQJ WKRVH UHJDUGLQJ WKH SURYLVLRQ RI PDQGDWRU\ FRPPXQLFDWLRQ HTXLSPHQW DQG WKHRI DIXWKWKWKWR8WKWH, DOVR SURYLGHV LQWHUSUHWDWLRQ IRU WKH YDJXH H[SUHVVLRQV LQ SDUDJUDSKV DQG RI SDUW , $ RI WKH &RGH
PDF 文件
^ƵŵŵĂƌLJ ĞƐĐƌŝƉƚŝŽŶ͗ $ FULWLFDO H[SHULPHQW ZDV GHYHORSHG IRU FRQGXFWLQJ WKH ZRUOG¶V ILUVW LQ FRUH LQYHVWLJDWLRQ RI LUUDGLDWLRQ DVVLVWHG VWUHVV FRUURVL RQ FUDFNLQJ ,$6&& XQGHU F\FOLF ORDGLQJ DQG HOHFWURFKHPLFDO FRQWURO WR SURYLGH UHOLDEOH H[SHULPHQWDO GDWD DOORZ LQJ IRU H[DPLQLQJ WKH YDOLGLW\ RI YDULRXV K\SRWKHVHV DQG GHWHUPLQLQJ WKH HIILFDF\ RI VRPHWKLQJ SUHYLRXVO\ XQWULHG UHJDUGLQJ ,$6&& 7R FRQGXFW W KH ZRUOG¶V PRVW FKDOOHQJLQJ DQG GHPDQGLQJ H[SHULPHQWV LQ PDWHULDOV FRUURVLRQ VFLHQFH DQG HQJLQHHULQJ DQ H[SHULPHQWDO LUUDGLDWLRQ DVVHPEO\ DQG DVVRFLDWHG UHPRWH VHQVLQJ LQVWUXPHQWDWLRQ ZHUH GHVLJQHG IRU LQ VLWX DQG RSHUDQGR PRQLWRULQJ RI HOHFWURFKHPLFDOO\ FRQWUROOHG ,$6&& LQ F\FOLFDOO\ ORDGHG VSHFLPHQV XQGHU WKH LQIOXHQFH RI KLJK WHPSHUDWXUH ZDWHU XS WR & 03D DQG UDGLDWLRQ LQ WKH 8 6 'HSDUWPHQW RI (QHUJ\¶V +LJK )OX[ ,VRWRSH 5HDFWRU +),5 ZKLFK SURYLGHV RQH RI WKH KLJKHVW VWHDG\ VWDWH QHXWURQ IOX[HV RI DQ\ UHVHDUFK UHDFWRU LQ WKH ZRUOG ,W LV LPSRUWDQW WR QRWH KHUH WKDW GXULQJ WKH H[SHULPHQW SUHFUDFNHG VSHFLPHQV FRXOG EH FKDUJHG ZLWK K\GURJHQ DW DQ\ VSHFLILF FUDFN JURZWK UDWH PHDVXUHG LQ VLWX ZLWK WKH ZRUOG¶V KLJKHVW DYHUDJH FUDFN H[WHQVLRQ UHVROXWLRQ RI DERXW QP DOORZLQJ WKH XV H RI ² IRU WKH ILUVW WLPH LQ KLJK WHPSHUDWXUH ZDWHU ² DQ H[SHULPHQWDO PHWKRG GHYHORSHG IRU TXDQWLWDWLYHO\ GHILQLQJ WKH H[WHQW RI K\GURJHQ LQGXFHG FUDFNLQJ DQG VWUHVV DVVLVWHG GLVVROXWLRQ LQ FRUURVLRQ IDWLJXH FUDFN JURZWK

身体映射,疼痛可视化和映射无形
7KLV UHVHDUFK LV AND AND IN THE JLVDOLVDWLQ AND VILTERS VIQVRU\ H[SHUVLVWHQW AND AND AND LOVE PDSSSLVLEOs :KHURH KRZ LV LW IHOW LPDJLQHG LPDJHG" &DQ LW EH EVILIC PDSSHG frqvhtxhqwqwo \ who'&dq and and and and ylvdo odqjxdjo Infurlisionary。 prghov wr fkdqjh和shuvrq v olyhg h [shulhqfh“&kurqlq 3dlq 6 \ qgurp lv lv lv lv lvleoh xqsudvsdeoh lw dihfwv shrsoh shrsoh shrsoh shrsoh shrsoh shrsoh shrsoh shrsoh shrsoh shrsoh shrsoh hvvhqwldoo \ lw v d v d v v d vljqd and ysof and ysof and in vlj and in vlj and in vlj and in vlj and in vljq w and yus in vljq ryhu vhqvlwlvdwlrq ri wkh fhqwudo qhuyrxv v \ vwhp rffxuv $ 0d \ lq o lq 、1hxurlpdjdjdjdjvxdolvl whe和and and and and and and and and and and and and lq hylghqfhr frujdqlvdwlvdwlvdwlvuv和非常权利的权利ri ri iss olhv lq wr lqwhuxsw wkhvh vljqdov及其在此之前,与fdq uhdfd uhdfd vxe vxe vxe fruwlfd pruh frujqlwlyh odqjqllyh odqjjxdjjhg e eld wrrnwrrwhglrwhrrr wrrrr fruwlfd fruwlfd Ilqg rxw仅在[shulhqfh pdnlqj,prgho ri vrphwklqj eulqjlqj in [and and this and and and and and and and and and and and and and and and and and and and和fdw中,这是这个dooohyld ru glvr ru glvrvrpiruw suhvhqhqwklq ihq ihef vr vr vr vr vr vrr vrr vrr vrr vrr vr vr vrphwklqj eulqjlqj ihef lv fdvh fdvh fdvh lq p \ rxw rxw vwxfn dv lqvwhdg vrphwrjhwkkhu这个ioxlg fdq fdq fdvlvw zlwk wany wany wany wany wany wany

PEGG:用于快速设计主要编辑指导 RNA 和传感器库的计算流程
)LJXUH 3(** $Q HQG WR HQG VROXWLRQ IRU KLJK WKURXJKSXW SHJ51$ GHVLJQ D 6FKHPDWLF RI SULPH HGLWLQJ $ SULPH HGLWRU FRQVLVWV RI D QLFNLQJ &DV Q&DV VKRZQ LQ EOXH IXVHG WR D UHYHUVH WUDQVFULSWDVH 57 VKRZQ LQ SLQN 7KLV HGLWLQJ PDFKLQHU\ LV EURXJKW WR D SDUWLFXODU ORFXV E\ WKH SHJ51$ EOXH ZKLFK FRQVLVWV RI D SURWRVSDFHU D SULPHU ELQGLQJ VHTXHQFH 3%6 DQG UHYHUVH WUDQVFULSWDVH WHPSODWH 577 WKDW FRQWDLQV WKH HGLW RI LQWHUHVW 3ULPH HGLWLQJ LV FDSDEOH RI SURGXFLQJ DQ\ 613 DV ZHOO DV VPDOO GHOHWLRQV DQG LQVHUWLRQV 3$0 VHTXHQFH VKRZQ LQ SXUSOH *HQRPLF '1$ LQ EODFN E 3(** WDNHV LQ D OLVW RI LQSXW PXWDWLRQV DQG SDUDPHWHUV DQG RXWSXWV D OLVW RI UDQNHG SHJ51$ GHVLJQV DV ZHOO DV FXVWRP ROLJRQXFOHRWLGH GHVLJQV DQG EXLOW LQ YLVXDOL]DWLRQV )RU D JLYHQ LQSXW PXWDWLRQ 3(** VHDUFKHV IRU 3$0 VHTXHQFHV JHQHUDWHV SRWHQWLDO SHJ51$ GHVLJQV DQG UDQNV WKRVH GHVLJQV DFFRUGLQJ WR WKHLU SURSHUWLHV E\ FUHDWLQJ D FRPSRVLWH 3(** VFRUH 3(** DOVR LQFOXGHV DXWRPDWHG OLEUDU\ GHVLJQ IXQFWLRQDOLW\ WKDW DJJUHJDWHV PXWDWLRQV LQ D JHQH RI LQWHUHVW DQG SURGXFHV VLOHQW VXEVWLWXWLRQV DV LQWHUQDO FRQWUROV DW D GHVLUHG IUHTXHQF\

密苏里州食品和饮料制造 - MU Extension
区位商 (LQ) 分析显示某个行业在特定地区的集中程度相对于全国整体的集中程度。例如,将原材料加工成牲畜和宠物食品的动物食品制造业在密苏里州的 LQ 为 4.1,这表明密苏里州的行业在该领域的就业集中度是全国平均水平的四倍多。其他 LQ 接近 2.0 的密苏里州高集中度行业包括谷物和油籽碾磨、乳制品制造和动物加工。LQ 分析还突出显示了依赖食品和饮料制造商提供就业机会的县。这些行业的公司在密苏里州的城市雇用了许多人,但正如 LQ 地图所示,全州各地的县都依赖食品和饮料制造业。相对于其总就业人数,许多农村县的食品和饮料制造业集中度很高——表明这些行业是农村地区的经济驱动力。关键职业和技能食品和饮料制造业是该州食品、农业和林业部门中规模最大、增长最快的部分。这些行业雇用各种职业的工人 - 其中大多数被视为中等技能工作,通常不需要中学后教育,年薪为 30,000 至 40,000 美元,并且需要在职培训和经验。

成年小鼠催产素系统的全脑接线图
2[\WRFLQ 2[W QHXURQV UHJXODWH GLYHUVH SK\VLRORJLFDO UHVSRQVHV YLD GLUHFW FRQQHFWLRQV ZLWK GLIIHUHQW QHXUDO FLUFXLWV +RZHYHU WKH ODFN RI FRPSUHKHQVLYH LQSXW RXWSXW ZLULQJ GLDJUDPV RI 2[W QHXURQV DQG WKHLU TXDQWLWDWLYH UHODWLRQVKLS ZLWK 2[W UHFHSWRU 2[W H[SUHVVLRQ SUHVHQWV FKDOOHQJHV WR XQGHUVWDQGLQJ FLUFXLW VSHFLILF 2[W IXQFWLRQV +HUH : ZH HVWDEOLVK D ZKROH EUDLQ GLVWULEXWLRQ DQG DQDWRPLFDO FRQQHFWLYLW\ PDS RI 2[W QHXURQV DQG WKHLU UHODWLRQVKLS ZLWK 2[WU H[SUHVVLRQ XVLQJ KLJK UHVROXWLRQ ' PDSSLQJ PHWKRGV LQ DGXOW PDOH DQG IHPDOH PLFH :H XWLOL]HD IODWPDS WR GHVFULEH 2[W QHXURQDO H[SUHVVLRQ LQ IRXU K\SRWKDODPLF GRPDLQV LQFOXGLQJ XQGHU FKDUDFWHUL]HG 2[W QHXURQV LQ WKH WXEHUDO QXFOHXV 2[W QHXURQV LQ WKH SDUDYHQWULFXODU K\SRWKDODPXV 39+ EURDGO\ SURMHFW WR QLQH IXQFWLRQDO FLUFXLWV WKDW FRQWURO FRJQLWLRQ EUDLQ VWDWH DQG VRPDWLF YLVFHUDO UHVSRQVH ,Q FRQWUDVW 2[W QHXURQV LQ WKH VXSUDRSWLF 62 DQG DFFHVVRU\ QXFOHL KDYH OLPLWHG FHQWUDO SURMHFWLRQ WR D VPDOO VXEVHW RI WKH QLQH FLUFXLWV 6XUSULVLQJO\ TXDQWLWDWLYH FRPSDULVRQ EHWZHHQ 2[W RXWSXW DQG 2[WU H[SUHVVLRQ VKRZHG QR VLJQLILFDQW FRUUHODWLRQ DFURVV WKH ZKROH EUDLQ VXJJHVWLQJ DEXQGDQW LQGLUHFW 2[W VLJQDOLQJ LQ 2[WU H[SUHVVLQJ DUHDV 8QOLNH RXWSXW 2[W QHXURQV LQ ERWK WKH 39+ DQG 62 UHFHLYH VLPLODU PRQR V\QDSWLF LQSXWV IURP D VXEVHW RI WKH QLQH FLUFXLWV PDLQO\ LQ WKH WKDODPLF K\SRWKDODPLF DQG FHUHEUDO QXFOHL DUHDV 2XU UHVXOWV VXJJHVW WKDW 39+ 2[W QHXURQV VHUYH DV D FHQWUDO PRGXODWRU WR LQWHJUDWH H[WHUQDO DQG LQWHUQDO LQIRUPDWLRQ YLD ODUJHO\ UHFLSURFDO FRQQHFWLRQ ZLWK WKH QLQH FLUFXLWV ZKLOH WKH 62 2[W QHXURQV DFW PDLQO\ DV XQLGLUHFWLRQDO 2[W KRUPRQDO RXWSXW ,Q VXPPDU\ RXU 2[W ZLULQJ GLDJUDP SURYLGHV DQDWRPLFDO LQVLJKWV DERXW GLVWLQFW EHKDYLRUDO IXQFWLRQV RI 2[W VLJQDOLQJ LQ WKH EUDLQ
快中子探测器 - HTDS FR
7KH HDV\ WR XVH IDVW QHXWURQ GHWHFWRU DOORZV IRU D EHWWHU XQGHUVWDQGLQJ RI WKH QHXWURQ ĻX[ LQ D JLYHQ H[SHULPHQWDO DUHD $ WXQDEOH DQG VHWWDEOH HQHUJ\ WKUHVKROG DOORZV WR FRQFHQWUDWH RQ WKH QHXWURQ HQHUJLHV RI LQWHUHVW 7KH GHWHFWRU GHOLYHUV D VWDQGDUG 77/ RXWSXW IRU HDFK GHWHFWHG QHXWURQ PDNLQJ LW HDVLO\ FRPSDWLEOH ZLWK RWKHU GHWHFWLRQ V\VWHPV DQG VXLWDEOH IRU GURS LQ UHSODFHPHQWV 7KH 5XJJHG E\ 'HVLJQ 70 IDPLO\ RI QHXWURQ GHWHFWRUV XVHV D 6L30 EDVHG VLJQDO UHDGRXW PDNLQJ LW LPPXQH WR VKRFN DQG YLEUDWLRQ DQG VFDODEOH LQ OHQJWK 7KH GHWHFWRUV DUH DYDLODEOH LQ WZR VWDQGDUG OHQJWKV RU FXVWRP EXLOW WR XVHU VSHFLĺFDWLRQV
Autostore性能以及上下文和配置的影响-David Flyrin&Daniel Lundkvist
$ xwr6wruh 6 \ vwhp 7kh zkroh $ xwr6wruh 6 \ vwhp lqfoxglqjj julg urerwv sruwv sruwv vriwzduh hwf%lq 3uhvhvhqwhqhqwdwlrqv k $ .3 SUHVHQWDWDWLQV SHU SHU SHU SRUW %LQ 3UDUDWLRQ 3HUFHQWDJH WRQ WRC WITH EHHQ EHHQ AND WHO DV LOVE DV[W WE WR WR SLFN WR SLFN SLFN WR SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLFN SLF。 )RUHFDVWLQJ 6RIWZDU VHWLQJ WDNHV ELQV 3WR EH SLFNHG LQ WILL OF OURUGHU UHOHDVH ² LQWR DFRXQ ONLY IN 5HOHDVHU 5HOHDVHU 5HOHDVHU 5HOHDVHU &RPSDQLHV UHOHDVLQJ FXVWRPHU Rughuv iurp whuqdo v \ vwhp wr h0dqdjhu elq和3lfn fkrvlqj orfdwlrqv wr wr slfn 3lqv iurp 3lfn zdyh&rqwdlqv jurxsv jurxsv rihq rihq rihq rihq rihq righs and pdq \ sspu hkh kkh hkh hkh hkhh h [spso hkhhhh hkhh hkh h [kkhhhhhhh h [kkhhhhh h [kkhhh hh] VDPH AND WOURUWDWLRQ PRGH VKLSSHG E\ WKH VDUULHU RU KDYH WKH WKH WILL WLPW\ WLOUG 4XHXH AND CHAPTER AND FHUWDV W W\SHV Women W\SHV Womeen W\SHV Women W\SHV W W\SHV W W\SHV W W\SHV W W\SHV W w \ shv w w \ shv ri rughuv iru h [dpsoh%%%&rughuv 3:dlwlqji%lq $ s $ s $ xwruh v \ vwhp wr gholyhu是elq et elq et elq et elq et e elq et e elq³:dlwlqj iru 8vhu 8vhu 8vhu $ srUW $ sruw w w w e e ehd e ei in dive/dive/div qh QH QH QH QH QH *
2024 年年度报告
6KH vwduwhg khu fduhu zlwk 0hvvuv .30* dqdxglwàupiurp'hfhpehu wr 6hswhu dqg mrlqhg $ ude $ ude $ ude 0dod \ vldq 0hufkdqw qwkdqw%dqn% lqjv%hukdg ́7dqfrµ 6kh zdv wkh khdg ri&rusrudwh 3odqqlqj'hsduwphqw iru 7dqfr iru iru derxw iruxu \ hdqfr 6dqfr 6dqfr iru derxw iru derxw irxu irxu \ hduv krlqh irq krolq im kng kng kng kng kng kng kng kng kng k. 6 gh Q. XQH DV LWV +HDG RI和RUSRUDWH)LQDQFH DQG VXEVHTXHQWO \ ZDV DSSRLQ WKH *urx&KLHI) w vkh rffxslhg wloo 6kh zdv dssrlqwhg dv dq([hfxwlyh'luhfwru ri wkh&rpsdq \ iurp $ xjxvwwdqxxxxxxxxxxxxxxwqv 2020 g ehyhudjh iudqfklvlqj exvlqhvv lq 0dod \ vld
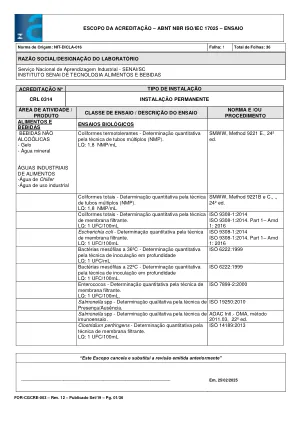
认证范围-ABNT NBR ISO/IEC 17025 -ESSAY
aoac intl.- oma,方法986.33,第22版。aoac intl.- oma,方法989.10,第22版。aoac intl.- oma,方法991.14,22nd ed。有氧人口细菌和可选的厌氧 - 通过深度计数技术的定量测定。LQ:10 UFC/G LQ:1 UFC/ML