XiaoMi-AI文件搜索系统
World File Search SystemLabView

Marco Ricci 教授 - DIMES 人员 - 卡拉布里亚大学
Marco Ricci 自 2003 年以来一直积极从事科学研究,从那时起,他的研究活动主要集中在电磁场和声场及其与物质和材料的相互作用的研究上。这些年来,他的研究活动涵盖了各种主题:他在论文和博士学位期间开始研究量子信息的量子光学实现和最佳量子测量程序,而他的研究活动目前主要集中在开发应用于工业品、食品和文化遗产的无损检测和评估 (NDT&E) 测量程序,利用涡流、超声波和热成像和脉冲压缩理论。尽管上述研究领域不同,但在这两种情况下,Marco Ricci 的研究方法都以创新测量、处理和成像协议的理论建模活动为特征,并以持久的实验验证工作为支持,旨在验证理论并促进实际应用。同时,在过去十年中,他的研究兴趣也致力于研究磁性,特别是自旋电子学现象。在此框架内,Marco Ricci 获得了电磁、声学和热理论以及信号和图像处理多个方面的广泛知识,尤其是应用于 NDT&E 技术的知识。他还获得了各种科学软件方面的专业知识,例如 MATLAB、Labview、Mathematica 和 OriginLab 等。同时,持久的实验活动使他获得了数据采集系统(数字示波器、任意波形发生器、帧抓取器等)、超声波和声学传感器、红外摄像机、激光系统、电动平移台和相关驱动器等方面的经验和技能,并且能够使用 Labview 和 MATLAB 管理甚至复杂的测量设置。他是国际期刊和国际会议论文集上约九十篇论文的合著者,拥有三项意大利专利和各种书籍章节。他是一本关于超声波 NDT 工业应用的书的编辑,该书总结了由教育、大学和研究部资助的意大利研究项目 PRIN2009 期间获得的研究成果。在无损检测与评估领域(这是他的主要研究活动),他协调并参与了各种国内外研究和应用研究项目,与知名研究人员(华威大学的 DA Hutchins 教授、纽卡斯尔大学的 GY Tian 教授、拉瓦尔大学的 X. Maldague 教授等)以及西门子、华威大学、弗劳恩霍夫研究所、鲁汶大学、纽卡斯尔大学、原子能和替代能源委员会等知名外国学术和工业合作伙伴合作。所取得的成果使他在无损检测和评估界获得了国际声誉,事实上,他最近成为了“NDT & E International”杂志的编辑委员会成员,该杂志是该领域最负盛名的杂志之一。除了使用 NDT 技术测试工业产品外,Marco Ricci 还将其应用于食品检验(与 COLUSSI 和 Biscotti Gentilini 合作)并且最近用于文化遗产的检验。关于后一个迅速发展和非常有前景的主题,他是去年 1 月提交给 H2020-MSCA-ITN2019 的欧洲培训网络提案的协调员。各种研究人员、大学、研究中心、从事文化遗产研究的公司以及著名的重要欧盟博物馆(德累斯顿国立艺术收藏馆、莱比锡大学古物博物馆、贝加莫卡拉拉学院)都是该联盟的成员。
最终BTE轨道24-25
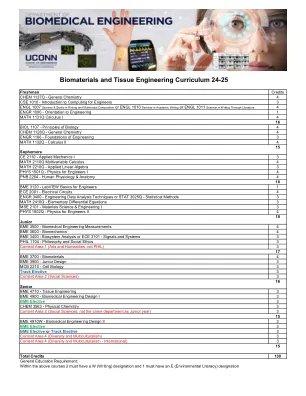
Freshman Credits CHEM 1127Q - General Chemistry 4 CSE 1010 - Introduction to Computing for Engineers 3 ENGL 1007 Seminar & Studio in Writing and Multimodal Composition or ENGL 1010 Seminar in Academic Writing or ENGL 1011 Seminar in Writing Through Literature 4 ENGR 1000 - Orientation to Engineering 1 MATH 1131Q Calculus I 4 16 BIOL 1107 - Principles of Biology 4 CHEM 1128Q - General Chemistry 4 ENGR 1166 - Foundations of Engineering 3 MATH 1132Q - Calculus II 4 15 Sophomore CE 2110 - Applied Mechanics I 3 MATH 2110Q Multivariable Calculus 4 MATH 2210Q - Applied Linear Algebra 3 PHYS 1501Q - Physics for Engineers I 4 PNB 2264 - Human Physiology & Anatomy 4 18 BME 3120 - LabVIEW Basics for Engineers 1 ECE 2001 - Electrical Circuits 4 ENGR 3400-工程数据分析技术或Stat 3025Q-统计方法3数学2410Q-基本微分方程3 MSE 2101-材料科学与工程学I 3 Phys 1502Q-物理学工程师II 4 18 JUNIOR BME 3500 3500-生物医学工程测量值4 BME 3600 -BME 3600 -BIEMENALSIC 4 BME机械310 -BME机械310 -BME 310- 1104 - Philosophy and Social Ethics 3 Content Area 1 (Arts and Humanities, not PHIL) 3 17 BME 3700 - Biomaterials 4 BME 3900 - Junior Design 3 MCB 2210 - Cell Biology 3 Track Elective 3 Content Area 2 (Social Sciences) 3 16 Senior BME 4710 - Tissue Engineering 3 BME 4900 - Biomedical Engineering Design I 3 BME Elective 3 CHEM 3563 - Physical Chemistry 3内容区域2(社会科学,与大三的部门不是同一部门)3 15 BME 4910W-生物医学工程设计II II 3 BME选修3 BME或Track pertective 3 Content 3 Content 3 Content 3(多样性和多元文化主义)3内容面积4(多样性和多元文化主义 - 国际)3 15

先进制造技术
* 通讯作者。电话 + 7 921 786 18 03;电子邮件:agkolosko@mail.ru 摘要 开发了一种用于记录和模拟复杂场发射实验的方法。该方法包括处理三种类型的数据流:场阴极电特性数据(电压和电流脉冲)、场发射投影仪数据(辉光图案)和飞行时间质谱仪数据(测量室中挥发性产物的质谱)。LabView 软件环境实现了一种同步再现多通道实验数据的算法,并可以实时处理这些数据。该程序有一套内置的软件工具,可以实现功能并多次重复实验,在指定的时间点暂停,以及在模拟中更改时间流速。通过研究基于碳纳米管的纳米复合场阴极的场发射的例子证明了该方法的能力。关键词 碳纳米管;场发射;多通道数据收集;在线处理;实验模拟。 © AG Kolosko, VS Chernova, SV Filippov, EO Popov, 2020 简介 获取、存储和处理实验数据的方法是实验物理学不可或缺的一部分。这些方法随着计算机和测量设备的发展而不断发展。如今,高速记录和数据记录手段可以接收大量信息。因此,例如,使用放射性粒子传感器的高速记录来研究热核反应堆(ITER)等离子体中发生的过程 [1]。另一方面,现代计算系统允许在线数据处理,将记录的信息量减少了几个数量级。在线处理还允许控制实验系统随时间和实验条件变化时的行为,例如,记录场发射器(电流脉冲)响应的幅度,电压脉冲幅度急剧增加 [2]。本文描述的场发射实验是一类特殊的实验,其实施需要创建真空
硕士论文实时润滑剂老化分析
目前,摩擦学系统的运行性能和可靠性是通过采用定期或在线诊断技术来维持的。这些技术当然在提高各种系统的性能、可靠性和耐用性方面是有效的。然而,这些系统总是必须关闭,以根据系统状况采取必要的纠正措施。这种方法通常被认为是被动的,目前没有太多主动方法能够就地采取纠正措施,以保持复杂技术系统所需的性能、可靠性和耐用性。吕勒亚理工大学机械元件系最近创造了一个新术语“摩擦电子学”。它本质上是基于结合摩擦学和电子学知识,用于主动控制和优化现代技术系统的性能、可靠性和耐用性。Tribotronics 目前还只是一个想法,还需要进行大量的研发工作才能开发出可行且可靠的 Tribotronic 系统。因此,本论文是长期开发 Tribotronic 系统的第一步。众所周知,润滑剂在控制(最小化)机器的摩擦和磨损方面起着非常关键的作用。因此,其性能在老化过程中的劣化会显著影响技术系统的性能、可靠性和耐用性。当然,有几种实验室测试可以分析和测量使用过的润滑剂性能的变化,但对其在使用过程中老化的理解还远远不能令人满意。因此,显然需要开发一些技术或系统来监测和现场分析润滑剂在使用过程中的老化行为。这项工作的重点是开发和实施 Tribotronic 诊断系统 (TDS),以监测位于吕莱亚理工大学 Tribolab 的 Haldex 限滑联轴器 (HLSC) 试验台上的润滑剂老化情况。在开发 TDS 原型时使用了流体特性分析仪。还开发了 LabVIEW 测量界面来测量和分析各种润滑剂参数。为了了解润滑剂的老化行为,在 HLSC 测试中使用润滑剂时,润滑剂粘度和介电性能的变化

DNx-AI-256
一般描述 DNx-AI-256 是高性能双通道同步器/解析器输入和输出板,与 UEI 强大的 Cube、RACKtangle 和 FLATRACK I/O 机箱兼容。256 系列板在功能上与 DNx-AI-255 类似,但为需要它的应用提供了更多的输出驱动。DNx-AI-256 系列也是 LVDT/RVDT 的理想解决方案。该板可以配置为两个输入、两个输出或一个输入和一个输出。该板提供 2 个输入通道,可监控 3 线同步器或 4 线解析器。该板的高精度电路与每个通道独立的 16 位 A/D 转换器相结合,可实现高达 ± 2.6 弧分的测量精度。输入的读取速率最高可达激励频率(最大 10 kHz)。每个通道均提供自己的可编程参考,输出可独立编程,最高可达 19.8 Vrms,频率范围为 50 至 10 kHz,最高可达 2.4 VA。使用外部参考时,DNR-AI-256 可在一个参考周期内自动调整模拟输出,以获得可变幅度和频率参考。DNx-AI-256 还提供两个同步器/解析器/RVDT/LVDT 接口通道,非常适合用于姿态指示器等设备,或作为各种同步器或解析器输入设备的测试源。每个输出均接受独立的参考信号,并提供 16 位输出分辨率。无需外部缓冲,每个通道将以 3.0 VA 驱动高达 19.8 Vrms(总板输出必须小于或等于 5 VA)。可以监控每个输出通道消耗的电流,以确认接线正确,同步器/解析器或 RVDT/LVDT 的线圈符合预期。该板在通道之间以及 I/O 连接和底盘之间提供 350 Vrms 隔离。与所有 PowerDNA/UEILogger I/O 板一样,DNx-AI-256 可在恶劣环境下运行,并已通过 3g 振动、50g 冲击、-40 至 +70 °C 温度和高达 70,000 英尺的高度测试。包含软件,提供全面且易于使用的 API,支持所有流行操作系统,包括 Windows、Linux 和大多数实时操作系统(如 QNX、Intime、VXworks 等)。此外,UEIDAQ 框架(更高级别的 Windows 驱动程序)为使用多种流行 Windows 编程语言创建应用程序的用户以及 LabVIEW 和 MATLAB/Simulink 等数据采集软件包提供全面支持。由于 DNR-AI-256 具有高功率输出,因此应在其旁边的插槽中放置一个风扇装置以防止过热。风扇装置 DNR-FAN-925 包含在 DNR-AI-256 中。

SPI-TCSPC-16-Bristol
规格建议的运行条件最小标称最大限制探测器通道数量1-16-检测器输入电压0MV -180MV至-550MV -1200MV -1200MV -1200MV脉冲宽度0.48NS 6NS 6NS 6NS至12NS至12NS 34NS-触发边缘边缘掉落 - 可触发边缘掉落 - 可触发的Edgromable -able -able -able -able -able -ablebable thosmable thosmable -000 000 000 000 000 000 000 000 000 000 000 000 000 000 000 000 000 000 000 000 000 000。 -3000mV 3300mV 4000mV Input Impedance 50Ω Sync Inputs - GPS Input voltage 0mV 1000mV - 3000mV 3300mV 4000mV Input Impedance 50Ω Time to digital Converter (TDC) Minimum time bin width Refer to Mode Parameters table Timing precision 3ps 4ps Timing precision (rms) 2.12ps 2.8ps Adjustable delay range - Sync TBD Count rate Refer to Mode Parameters table Sync Rate TBD Histogrammer Count depth 16 bit Maximum number of bins 65536 Acquisition time - Oscillator sync 1ms TBD Acquisition time - GPS Sync 1ms Infinite Temperature Range Operating 0 o C - +50 o C 70 o C Storage -40 o C - +85 o C 100 o C 64-bit Time Tagging Channel Number Bits [60:63] (4 bits, 16 values) Sync event count/GPS UTC Bits [32:59] (28 bits, 4,294,967,296 values) Time Offset from sync event Bits [0:31] (32 bits, 268,435,456 values) 250fs resolution GPS Time Tagging GPS tagging allows time correlation of tags for experiments & communication systems in different physical locations.标签存储在FIFO内存中,准备在硬件接口上交付,以便在多个通道上的高速爆发收集。FIFO DEPTH 65536标签。GUI和软件模块化软件方法:模块化软件系统。用于直方图生成,巧合计数和定制模块的模块可用于特定客户应用程序灵活性Python&LabView界面,可为客户自己的接口提供。具有以太网选项的网络,可以将仪器设置为多播服务器,从而允许通过订阅多播组的多个软件连接到单个仪器。适用于许多客户需要从组检测器来源访问标签信息的大型实验室。简单的仪器接口:仪器管理接口,用于选择同步源,设置TAC模式并设置标签交付过程。主机界面USB 3.0链接链接速度5GB/s,最大持续标签率= 80 mtag/sec以太网链路链接速度1GB/s,最大持续标签率= 15.625 mtag/sec操作系统支持OS:使用交叉平台GUI接口机械宽度260mm Depth 260mm Divors Sma Andope sma sma connects os:windows/linux sma connects sma
MDY简历 - 机器人-DOMYAM
Applications : SOLIDWORKS, Simulink, LabVIEW, Microsoft Office, Creo, NX, ANSYS, Confluence, Unity Programming : Python, C++, MatLab, HTML, Java, ROS, Machine Learning, Image Processing, Embedded Firmware Manufacturing : Sheet Metal Design, CNC, Composite Materials, DFM, Soldering, PCB Design, Rapid Prototyping Professional Experience Planet Labs -系统工程实习生 - 2023年6月 - 2023年6月,加利福尼亚州旧金山•在我们的下一代航天器上开发了任务重要资格测试的测试程序。•模拟了航天器原型的一天中的一天,涵盖了所有子系统以进行需求验证。基本机器人技术 - 机械工程师 - 加利福尼亚州帕萨迪纳,2020年1月 - 2022年8月•使用神经网络推理加速器开发了下一代感知硬件。•开发了用于基于Docker的容器的机器人操作系统的外围驱动程序。•集成的神经网络将优化的边缘计算机纳入生产硬件解决方案。•向消费者,工业和食品安全的制造环境部署和集成的自定义检查硬件。Morse Corp-工程合作社 - 马萨诸塞州剑桥市2019年1月 - 2019年8月•为无人机设计的结构组件及其在Solidworks中的飞行测试设备。•开发了固件,以控制飞行测试设备上释放机制的精确时机。•使硬件测试方法更可靠,并且与自动测试和冗余安全系统一致。•与系统工程团队合作就与美国陆军的主要开发合同提案。努力机器人 - 系统工程合作社 - 马萨诸塞州切尔姆斯福德,2018年1月 - 2018年6月•对机器人性能进行了移动性,耐力,通信和附属互操作性的验证。•设计了一种定制测试工具,以使用基于Python的软件来测量和记录机器人地面速度。HASBRO Inc.-工程合作社,Integrated Play -Pawtucket,RI,2017年1月至2017年6月•使用高级技术,诸如语音交互之类的高级技术,为动画,连接的玩具设计了新的游戏体验。•使用Unity和Google Cardboard Android应用程序原型的新型游戏VR互动概念。•使用加工和3D打印零件创建了用于未来动画玩具的机制模拟。工程活动结构和复合材料实验室 - 研究生研究员2023-2024•研究物理知情的神经网络,用于建模飞行中机翼的空气动力学和结构响应。•开发和训练神经网络,使用Pytorch和Nvidia模量框架预测复杂的3D流。Avatar Xprize Arm Capstone Project 2019秋季•在由5名学生组成的团队中,设计和原型拟建了拟人化机器人手臂和触觉外骨骼控制器。•开发了一个带有精确扭矩控制的准直接驱动应用程序的紧凑型无刷发动机驱动程序。•编写了电动机控制器固件,包括面向现场的控制,RS485上的串行通信以及实施

奥斯汀·C·海耶斯
• CU 博士论文工作 2018 年 8 月至今 直驱发电机比齿轮发电机具有更高的可靠性;但是,它们通常非常大(10MW 涡轮机重达 220 吨)。其中大部分质量是结构支撑材料。通过实施适合增材制造的拓扑优化和晶格结构,发电机重量可减轻多达 50%。此外,通过集成先进的冷却方法,可以显着提高功率密度,从而进一步减轻重量并降低机器成本。我制造了一个定制的 3 kW 发电机来测试各种冷却技术所能实现的最大电流密度,并使用这些数据来支持高功率密度 12 MW 直驱风力涡轮发电机的分析设计。我还研究了增材制造的空气质量和糊料挤出工艺的建模。 • HP Inc 金属 3D 打印实习生 2019 年 5 月 - 2019 年 8 月 在 HP Inc 的第二次实习中,我致力于开发用于现场打印机监控的方法和指标,以改善分层缺陷和各向同性。粉末粘合剂喷射本质上是一个分层过程,这会导致烧结缺陷。我创建了一个 MATLAB 脚本来自动分析烧结横截面以确定定量打印指标 • HP Inc 金属 3D 打印实习生 2018 年 5 月 - 2018 年 8 月 在 HP Inc 工作期间,我开发了一种高速成像装置,以更好地了解 3D 打印过程。我研究了粉末粘合剂喷射应用中的粉末-粘合剂相互作用。金属打印提出了聚合物粉末-粘合剂喷射中未曾见过的独特挑战;因此,我的工作是为了更好地理解这些独特的挑战。 • RIT 硕士论文工作 2016 年 8 月 - 2018 年 5 月 在我的硕士论文中,我使用金属增材制造的微结构来增强池沸腾传热。RIT 与 Vader Systems 合作,获得了第一台液体磁喷射 3D 打印机(现为 Xerox ElemX)。该打印机使用线材将熔融的铝液滴一滴地喷射到构建平台上,以产生高沉积速率和高分辨率。在我的项目中,我使用这项技术构建了新颖的微结构,以利用增材制造实现的气泡设计将池沸腾传热提高多达 7 倍•微流体高级设计项目(HP 赞助)2017 年 8 月 - 2018 年 5 月通过 RIT 进行的多学科项目,我们小组在惠普公司的支持下提出了自己的项目。我们开发了一种方法来创建一种低成本的微流体装置以评估层流的混合。目前,很难混合层流状态(例如生物医学应用所需的层流状态)。通过在 FAB 中的硅晶片上创建集成电阻加热器,并与低成本封装方法接口实现密封,可以创建一个流动混合装置。混合机制来自于实现类似于 HP 专利热喷墨技术的局部亚稳态沸腾。该项目是一个正在进行的研究项目,旨在确定其可行性和影响混合的参数。• NREL 科学本科实验室实习生 2017 年 5 月 - 2017 年 8 月在 NREL 工作期间,我使用有限元分析 (ANSYS) 来确定减轻大型直驱发电机重量的潜力。这可以减少 24% 的质量,同时还可以将径向偏转减少 60%。最佳的添加方法是粉末粘合剂喷射,并使用多喷射打印创建实验模型以证明设计的可打印性。我们的研究产生了两份会议论文集和两项 ASME 论文奖。• 在 IBM 与高级热能效率实验室合作 2016 年 5 月 - 2016 年 8 月在 IBM,我的工作是密封一个实验性的两相测试回路,该回路之前出现泄漏,已停运一年半。这涉及使用与 Matlab 脚本交互的 LabVIEW 数据采集来确定 Swagelok 系统是否长时间保持真空。此外,我与其他实习生和热工程师合作设计了一张流量卡,以模拟主机中的实际压降。然后,这张流量卡被 3D 打印出来并进行测试,以查看它是否对齐

Google无人驾驶汽车报告PDF
Google无人驾驶汽车是一款自动驾驶的汽车,可以安全,合法和舒适地在道路上航行。它结合使用Google地图,硬件传感器和人工智能软件来控制其运动。该项目由塞巴斯蒂安·瑟伦(Sebastian Thrun)领导,他还共同发明了Google Street View,并赢得了2005年DARPA大挑战赛。汽车将Google地图与各种硬件传感器集成在一起,包括LiDAR,摄像机,距离传感器和位置估算器。LIDAR技术使汽车可以测量最多60米的距离,而摄像机检测到即将到来的交通信号灯。距离传感器使汽车能够“查看”附近或即将到来的汽车或障碍物。位置估计器确定车辆的位置并跟踪其运动。人工智能软件从Google地图和硬件传感器接收数据,确定何时加速,放慢,停止或引导轮子。AI经纪人的目标是安全和合法地将乘客运送到所需的目的地。截至2012年,内华达州已经对Google无人驾驶汽车进行了测试,六辆汽车乘以140,000英里,偶尔进行人工干预。这项技术有可能彻底改变全球运输系统。回顾我在2014-2015学年在浦那大学的工程旅程,在AISSMS-SCOE的Gaikwad和Head Computer Engineering系的指导下,这是令人难以置信的启发性。我最真诚的感激之情延伸到A.M. Jagtap教授,他不仅提供了宝贵的指导,而且在整个学术期限内都为我提供了支持。自动驾驶汽车将控制驾驶,使用传感器来检测障碍物并相应地调整速度。这需要多种技术,包括车道检测,障碍物检测,自适应巡航控制,避免碰撞和横向控制。此外,传感器将监视道路状况,调整速度以确保安全行驶。完全自动化汽车是一项复杂的任务,但是在单个系统中取得了进步。配备了雷达,激光镜头和摄像机的Google的机器人汽车可以快速,准确地处理信息,从而做出决策并比人类更好地实施它们。这项技术有可能减少与交通相关的伤害和死亡,同时优化能源使用和道路空间。该系统结合了来自包括Google Street View在内的各种来源的数据,以创建完全自主的驾驶体验。过道Coe,浦那。车辆的转向和制动系统由通用处理器直接控制。该系统从各种来源接收感官输入,包括LiDar,Radar,位置估计器和Street View图像。LIDAR创建了一个三维平台,用于映射障碍物和地形。相机视觉馈电用于检测交通信号的颜色,使车辆能够相应地移动。同时,处理器不断与发动机控制单元进行通信。发动机控制单元具有硬件传感器,包括雷达,它使用无线电波来检测对象并确定其范围,高度,方向或速度。视觉选择会影响角分辨率和检测范围。雷达技术具有多种应用,例如空中交通管制,天气监测和军事系统。高科技雷达系统能够从高水平的噪声中提取物体。雷达系统以预定的方向传输无线电波,然后将其反映和/或被对象散射。反射回发射器的信号使雷达成为可能。如果一个物体移动更近或远,则由于多普勒效应,无线电波的频率发生了略有变化。雷达接收器通常位于发射器附近,电子放大器加强了接收天线捕获的弱信号。还采用复杂的信号处理方法来恢复有用的雷达信号。雷达系统在长范围内检测物体的能力是由于它们通过的介质对无线电波的吸收较弱。雷达系统依赖于他们自己的传输,而不是自然光或对象发射的波,通常是为了避免检测到某些对象,除非需要进行预期的检测。雷达技术使用人工无线电波照亮物体,尽管在数字信号处理和噪声水平提取方面具有高科技功能,但该过程使人眼或相机看不见。相反,LiDAR(光检测和范围)系统利用从激光器来测量目标的距离和特性的光脉冲,其应用涵盖了各个领域,例如地质和遥感。孔镜或梁分离器用于收集返回信号。1。与雷达不同,Lidar不使用微波或无线电波,从而与传统的雷达技术不同。它在大气研究,气象学甚至月球着陆任务中的使用都证明了其在不同地区的潜力。雷达和激光雷达系统之间的选择取决于特定要求,例如要检测到的对象的类型,环境条件和技术能力。与较短的红外激光器不同,机载的地形图映射激光雷达通常使用1064 nm二极管泵式YAG激光器,而测深的系统则使用532 nm的频率加倍激光器,因为后者能够以较少的衰减渗透水穿透水。图像开发的速度也受到系统中的扫描速率的影响,可以通过各种选项(例如双振荡平面镜或与多边形镜的组合)实现。固态照片探测器(例如硅雪崩光电二极管)和激光射击中的光电构皮之间的选择至关重要,接收器的敏感性是在激光雷达设计中需要平衡的另一个参数。非扫描系统(例如“ 3D门控观看激光雷达”)应用脉冲激光器和快速门控相机进行3D成像。在移动平台(例如飞机或卫星)中,需要仪器,包括全球定位系统接收器和惯性测量单元(IMU),以确定传感器的绝对位置和方向。这允许使用扫描和非扫描系统进行3D成像。每个卫星都会传输包括精确的轨道信息,一般系统健康以及所有卫星的粗糙轨道的消息。2。全球定位系统(GPS)在所有天气条件下都提供位置和时间信息,从地球上方的GPS卫星发送的准确的时序信号来计算其位置。接收器使用这些消息来确定运输时间,计算到每个卫星的距离,并使用三尾征来计算接收器的位置。然后以派生信息(例如根据位置变化计算出的方向和速度)显示此位置。在此处给出的文字Google Street View使用各种技术来捕捉全球街道的全景。专门的GPS应用程序同时使用位置和时间数据,包括用于交通信号的时机以及手机基站的同步。位置传感器(例如旋转器编码器)用于工业控制,机器人技术和其他需要精确轴旋转的应用。该系统由15个摄像头的玫瑰花结成,带有5百万像素CMOS图像传感器和自定义镜头。新一代的相机可以改善分辨率,取代了早期的相机。Google Street View显示了特殊改装的汽车的图像,但还使用替代方法来用于无法通过汽车(例如Google Trikes或Snowmobiles)进入的区域。这些车辆具有定向相机,GPS单元,激光范围扫描仪和3G/GSM/Wi-Fi天线。高质量的图像现在基于开源硬件摄像头。街道视图图像在放大地图和卫星图像后出现,可以通过将“佩格曼”图标拖到地图上的位置来访问。在交叉和交叉点处,显示了其他箭头。3。4。通过照片中的固体或损坏的线可视化相机汽车的路径,箭头指向每个方向的后续图像。人工智能软件过道COE,Pune使用控制单元。人工智能是旨在创建智能机器的计算机科学领域。智能代理人感知其环境并采取行动以最大程度地提高成功。Xeon处理器是一个多核处理器,最多8个执行核,每个核心支持两个线程。每个核心的共享指令和数据中级缓存处理实时传感器值和一般处理。两个Cortex-A9处理器处理转向和制动系统。异质计算是指使用各种计算单元(例如通用处理器或自定义加速逻辑)的电子系统。传感器数据获取:人类的感知经历了程序的运行,传感器数据采集涉及从各种传感器中收集和处理环境数据,包括LIDARS,CAMERAS和GPS/INS。JAUS互操作通信:无人系统的联合体系结构是由美国国防部开发的,为无人系统创建开放的建筑,Labview在其开发中起着至关重要的作用。驱车系统过热COE,浦那19 25。使用机电执行器和人机界面用电子系统替换传统的机械控制系统,从而消除了诸如转向柱和泵等组件。5。早期的副驾驶系统将演变成汽车运动员。算法:一种算法用于接收和解释从领导者车辆的位置数据,模仿其导航属性以准确遵循设定路径,并利用诸如面包屑位置和立方样条拟合的技术。逐线技术6.乘线技术驱动驱动线将技术与人工智能和算法相结合,仅控制三个驾驶零件:转向,制动和油门,取代传统的机械系统。通过电线技术进行电子驱动器及其应用的电子驱动技术涉及从车辆控制系统中消除传统的机械组件,并用电子传感器,计算机和执行器代替它们。DBW的优点包括通过计算机控制的干预来提高安全性,例如电子稳定控制(ESC),自适应巡航控制和车道辅助系统。此外,DBW提供的设计灵活性扩大了车辆定制选项的数量。但是,由于更高的复杂性,开发成本和安全性所需的冗余要素,实施DBW系统的成本可能会更高。另一个缺点是,制造商可能会降低某些范围内的油门灵敏度,以使车辆更容易或更安全。电子动力转向(EPS)是通过电线技术对驱动器进行的常见应用,该技术使用具有可变功率辅助的电子驱动转向系统。EPS系统在较低的速度下提供更多的帮助,而在较高速度下的援助则比液压系统更节能。电子控制单元(ECU)根据方向盘扭矩,位置和车辆速度等因素来计算所需的辅助功率。有四种形式的EPS:列辅助类型,小齿轮辅助类型,直接驱动类型和机架辅助类型。这些系统具有独特的优势,例如低惯性和摩擦,对各种汽车模型的适应性以及补偿单方面力量的能力。总体而言,电线技术的电子驱动器在车辆控制系统中提供了提高的安全性,灵活性和能源效率,这使其成为制造商的流行选择。在无人驾驶汽车中,使用算法和馈送到ECU的数据计算转向角度和扭矩,从而可以免提操作。6.3电线技术制动器用电子传感器和执行器代替了传统的机械制动系统,从而提供了减轻体重,较低的操作噪声和更快的反应时间等好处。但是,冗余制动系统对于安全性至关重要,在主要系统故障的情况下激活。电线技术的制动器使用雷达和激光镜输入来计算制动踏板传感器,从而使驾驶员无法施加制动器。使用电线技术的6.4节气门用电子控制代替了加速器踏板和油门之间的机械连接,并使用诸如加速器踏板位置,发动机速度和车辆速度等传感器来确定所需的油门位置。此设置提高了无缝的功率训练一致性,并促进了诸如巡航控制,牵引力控制和防止系统等功能的集成。运输官员的头等重点是流畅的流量。减少排放,燃油消耗减少,COE,Pune驾驶,带踏板位置无关,等等,辅助,空气燃料混合控制,减少排气排放。还与汽油直接注射技术,Aissms COE,Pune一起使用,许多地区正在开发许多区域,以允许人们使用它们,尤其是出租车服务,驾驶员由于各种原因而需要这份工作。当自动驾驶汽车能够执行没有额外的人的任务时,涉及人类服务的工作就会开始减少。这种现象类似于由自动驾驶汽车引起的大规模工作,这些汽车可以更有效地执行任务。自动驾驶汽车有可能彻底改变交通流量,而人类驾驶员可以选择破坏交通法律。随着自动驾驶汽车变得越来越普遍,交通拥堵将大大减少,从而使合并并退出高速公路。流量的减少将导致经济改善和平均燃油经济性的改善,以及由于其他车辆的一致性而导致的燃料消耗降低。3)燃油经济性自动驾驶汽车将消除不必要的加速和制动,以最佳的性能水平运行,以达到最佳的燃油效率。即使提高了1%的燃油效率,仅在美国就可以节省数十亿美元。通过实施自主安全系统,可以实现卓越的燃油效率。4)时间成本每天的价值在增加,自动化汽车可以为居住在繁忙城市的个人节省大量的时间。即使没有考虑货币价值,还有更多的时间进行休闲活动也会提高生活标准。降低由于流量而浪费的时间将使人们能够准时,更具动态并提高工作效率。期货距离自动驾驶汽车的过渡带来了一些好处,包括减少交通拥堵,提高燃油经济性和提高生产率。但是,它还引起了人们对设备成本,复杂的人工智能软件以及非理想道路条件对系统性能的潜在影响的担忧。demerits:1)高设备成本:使用高级技术,例如雷达,激光雷达,位置传感器,GPS模块,多核异质处理器和高分辨率摄像头很昂贵。2)复杂的AI软件:用于机器人汽车的人工智能软件的设计和实施是复杂的任务。3)多样化的道路条件:非理想的道路条件可能会影响软件做出的决策,从而可能影响系统性能。4)专业驾驶员结构的失业将大大减少许多与交通相关的问题。自动驾驶汽车可以更有效地利用道路,从而节省空间和时间。狭窄的车道将不再是一个问题,大多数交通问题将通过这项新技术的帮助最小化。研究表明,使用自动驾驶汽车,交通模式将变得更加可预测,而且问题越来越小。汽车制造商已经在高端型号中纳入了驱动程序辅助系统,这一趋势预计将继续。为了实现这一目标,需要进行广泛的研究和测试。随着智能车辆变得越来越普遍,公共部门的积极主动方法将决定何时到达这些福利。目前,存在各种技术来帮助自动驾驶汽车开发,例如GPS,自动巡航控制和巷道保持援助。这些技术可以与其他其他技术结合使用,例如基于视频的车道分析,转向和制动驱动系统以及编程控件,以创建一个完全自主的系统。主要挑战是获得公众信任,以允许计算机驾驶车辆。不会立即接受该产品,但是随着系统变得更加普遍,揭示其收益,随着时间的流逝,该产品会随着时间的流逝而获得接受。实施自动驾驶汽车将引起人们对可以执行任务的计算机代替人类的担忧。但是,社会不会立即改变;取而代之的是,随着这些车辆融入日常生活,随着时间的流逝,它将变得更加明显。2010年第11届国际控制,自动化,机器人技术和愿景国际会议(ICARCV)提出了一份名为“智能车辆导航方案”的研究论文。会议诉讼位于当年出版物的第1809-1814页。此外,2013年Kollam的T.K.M理工学院的研讨会报告探索了自动驾驶汽车的概念。A. Frome的一篇论文,“ Google Street View中的大规模隐私保护”,在2009年的第12届IEEE国际计算机视觉会议(ICCV 09)上发表了。该报告与来自浦那的Aissms Coe的研究人员合着。此外,罗尔夫·伊斯曼(Rolf Isermann)在2011年发表了《国际工程研究技术杂志》(IJERT)的第22卷。Google Street View开发的关键人物 Sebastian Thrun也是将Google的街头图像与人工智能软件相结合的先驱,以创建创新的导航系统。 他的工作为他赢得了美国国防部的重大认可和大量赠款。Sebastian Thrun也是将Google的街头图像与人工智能软件相结合的先驱,以创建创新的导航系统。他的工作为他赢得了美国国防部的重大认可和大量赠款。