XiaoMi-AI文件搜索系统
World File Search SystemLan

专用电缆 - 柯林斯航空
以太网电缆是用于局域网 (LAN) 应用和飞机上数据传输的高性能轻型电缆。随着航空市场对机上娱乐的需求不断增加,我们开发了整套以太网电缆来满足这些需求。我们提供 CAT 5、CAT 5e、CAT 6 和 CAT 7,提供适合任何应用并满足市场需求的电缆选项。此外,我们还提供预制电缆组件。
电子工程文凭(微电子)
*从2007年开始,除非另有说明,否则MQA的认证是永久的。所有经认可的资格都需要定期维护审核,以确保不断改进。如果撤销了资格的认证,则停止日期将显示在马来西亚资格登记册中。以前根据国家认证委员会(Lembaga Akreditasi negara,LAN)认可的资格,其有效期为5年,并且在MQR中陈述了此信息以进行参考。

Fortisase管理指南
更改日志7入门8要求8许可9初始化Fortisase 10简介11基于forticlient Agent的模式13 SWG无代理模式14专用公共IP地址14嵌入式板上登机指南15 FORTIFLEX许可18所需的服务和端口18选择可用性服务18个选择的服务端口18 SELECTION SELPESTIC dashboard 23 Resetting all dashboards 24 Drilling down on vulnerabilities 24 FortiView monitors 25 Adding a custom monitor 26 Resetting all monitors 26 Monitoring thin-edge bandwidth usage 27 Thin-Edge 28 Edge devices 30 FortiExtender 30 Prerequisites 30 Viewing notifications for a new FortiExtender 33 Configuring FortiExtender as FortiSASE LAN Extension 33 FortiGate 41 Prerequisites 42 Viewing notifications for新的Fortigate 42将Fortigate配置为Fortisase Lan扩展43 Fortiap 45先决条件46查看新Fortiap 47将Fortiap配置为Fortisase Edge设备48网络58 Secure Private Access 58
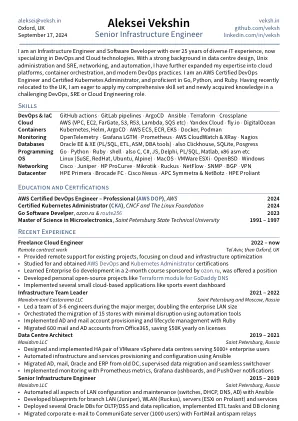
简历 - Alexei Vekshin
自由职业云工程师 2022 – 至今 远程合同工作 特拉维夫,然后是英国牛津 • 为现有项目提供远程支持,专注于云和基础设施优化 • 学习并获得 AWS DevOps 和 Kubernetes 管理员认证 • 在 ozon.ru 赞助的 2 个月课程中学习了 Enterprise Go 开发,获得了职位 • 开发了个人开源项目,例如 GoDaddy DNS 的 Terraform 模块 • 实现了几个小型基于云的应用程序,例如体育赛事仪表板 基础设施团队负责人 2021 – 2022 Maxidom and Castorama LLC 俄罗斯圣彼得堡和莫斯科 • 在重大合并期间领导了一个由 3-6 名工程师组成的团队,将企业 LAN 规模扩大了一倍 • 使用自动化工具以最少的中断协调了 15 家商店的迁移 • 使用 Ruby 实现 AD 和邮件帐户配置和生命周期管理 • 从 Office365 迁移了 600 个邮件和 AD 帐户,每年在许可证上节省 5 万美元 数据中心架构师俄罗斯圣彼得堡 • 设计并实施了 VMware vSphere 数据中心的高可用性对,为 5000 多名企业用户提供服务 • 使用 Ansible 自动化基础架构和服务配置 • 从旧 DC 迁移 AD、邮件、Oracle 和 ERP,监督数据迁移和无缝切换 • 使用 Prometheus 指标、Grafana 仪表板和 PushOver 通知实施监控 高级基础设施工程师 2015 – 2019 Maxidom LLC 俄罗斯圣彼得堡 • 使用 Ansible 自动化 LAN 配置和维护的所有方面(交换机、DHCP、DNS、AD) • 为分支 LAN(Juniper)、WLAN(Ruckus)、服务器(Proliant 上的 ESXi)和服务制定蓝图 • 为 OLTP/DSS 和数据复制部署了多个 Oracle DB,实施了 ETL 任务和 DB 克隆 • 使用 FortiMail 反垃圾邮件中继将公司电子邮件迁移到 CommuniGate 服务器(1000 个用户)
第四ICT策略概述提交给...
a)升级和刷新现有的IT数据中心组件(例如,电源备份 - 服务器,存储)b)2。升级,扩展网络连接(VoIP,LAN,VPN,备份链接,回程)c)在所有KRA站点上实现网络冗余d)实施灾难恢复中心e)通过利用绿色能源来增强远程服务的服务
对糖尿病护理和教育专家的能力的自我评估
第2步:创建一个P LAN后,一旦您将重点区域评为所有6个领域,请标记您希望今年优先考虑与您的职位和/或职业愿望相关的重点。浏览下面可用的教育资源,以确定支持您优先排序相应重点领域的教育资源。设定目标日期以完成您的教育目标,以便您可以开始练习新技能。

第 13 章-MyNavyHR
航空维修管理人员 (AZ) 执行海军航空维修计划 (NAMP) 要求的技术、管理和支持职责;准备与飞机和维护相关的信函;维护指令控制和保管记录、控制表格和报告要求;维护组织计划和方案内的管理文件;协调计划内和计划外的维护任务以及对海军飞机、航空设备和支持设备的变更和修改;组织、维护和运营海军航空技术出版物库 (ATPL);监督分散的图书馆;构建、配置、部署和操作海军航空后勤指挥管理信息系统 (NALCOMIS) 和自我监控分析报告技术 (SMART) 服务器;执行海军飞机、相关组件和支持设备的配置管理;管理 NALCOMIS 硬件、软件升级、网络安全和信息保证 (IA) 要求;建立和管理基本局域网 (LAN) 以支持海军行动;与舰载和/或岸上信息技术 (IT) 人员联络以获得 NALCOMIS 局域网 (LAN) 支持;并维护运营和维护部门之间的数据完整性。
职位描述供应链和IT官员团队/ ... div>
等级:4邮类和合同长度:国家(合同) - 直到2025年12月31日,可能性扩展。儿童保障:3级 - 邮政持有人会经常与孩子和/或年轻人接触(例如每周一次或更多)或强度(例如一个月或更长时间或过夜四天),因为它们与程序一起工作;或正在访问国家计划;或者因为他们负责执行警察检查/审查过程。角色目的:该职位的目的是为物流提供有效的支持(主要关注供应链,物流和IT),以适当实施不丹的“拯救儿童计划”。职位持有人将负责帮助IT领导/团队从事各种战略和技术工作,主要负责对整体IT系统,IT资产和资源以及管理各种服务器,Active Directory,Global/Global/Local Applications,LAN,LAN,WAN,WAN,WAN,WAN,WAN,WLAN,安全系统和协助信息管理系统的各种服务器,Active Directory,Active Directory,Active Directory和Active Directory,Active Directory和Active Directory,Active Directory和Active Directory,以及管理各种服务器。
五月 - 华盛顿军事部
在执行州《紧急状况管理法》第 38.52 章《华盛顿州修订法典》(RCW)时,我们尽一切努力遵守美国国土安全部 (DHS) 和联邦紧急事务管理局 (FEMA) 的要求。CEMP 支持国家防备系统,并将国家事件管理系统 (NIMS) 和《卡特里娜飓风后改革法》的要求纳入州紧急状况管理流程。该计划指定了权限、职能和职责,以在地方、州、部落、联邦、志愿者、私人和公共部门组织之间建立涉及整个社区的协作行动。通过协调紧急状况管理的所有阶段,该计划协助各组织将华盛顿州的灾难和紧急情况的影响降至最低。我相信它将成为拯救生命、保护财产、维持经济和保护环境的重要工具。