XiaoMi-AI文件搜索系统
World File Search SystemLegge
SLTM-4145_26-CAL-PROCEDURE.pdf - Legge 系统
欧姆安培表 第 2 部分 设备要求 注意 最低使用规格是执行校准所需的主要参数,包括这些规格以协助选择替代设备,这些设备可由使用实验室自行决定使用。替代设备的性能是否令人满意,应在使用前进行验证。所有适用设备必须有当前校准的证据。此程序中使用的仪器是从国防部设施中已知的仪器中选择的,按品牌或型号列出的列表并不意味着偏好、推荐或批准,其他制造商生产的设备可能能够在此程序中提供同样令人满意的性能。 项目 最低使用校准规格 设备 2.1 十进制电阻器 范围:0 至 1.111M 欧姆 通用无线电 1433B

根据艺术的客户信息。 45 法律关于......
数据处理依照相关的数据保护法。除上述KPT的合同伙伴外,个人数据不会传递给第三方。个人数据以电子和/或纸质格式存储。保存和删除的期限由相关法律规定予以规定。依据艺术。根据数据保护法 (LPD) 第 25 条,每个人都有权向保险公司索取有关其数据处理的法律要求的信息。有关数据保护的所有其他信息均可在 kpt.ch 网站上的数据保护声明中找到。
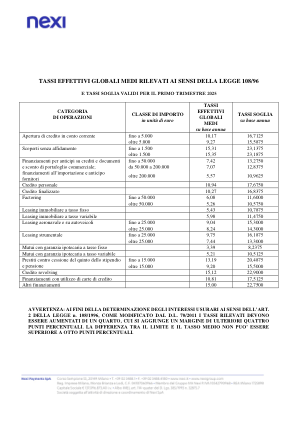
依据 108/96 号法律检测的平均有效总体比率
高达 15,000 13.19 20.4875 超过 15,000 9.20 15.5000 循环信用 15.12 22.9000 使用信用卡融资 10.81 17.5125 其他融资 15.00 22.7500 警告:根据艺术确定高利贷利息的目的。法律第 2 号108/1996,经第 70/2011 号立法法令修订,记录的税率必须增加四分之一,并在此基础上增加四个百分点的幅度。限额与平均利率之间的差异不得超过八个百分点。

根据艺术“供应商”的信息。圣马力诺法律第 13 条171/2018。
a) 从事经济活动(行政/管理、提供信息系统和档案、保险、银行或非银行中介)的公司; b) 负责完成行政/法律程序的专业会计师、劳工顾问和律师事务所,以及负责与工作场所安全有关的事务的技术和医疗公司; c) 数据控制者委托其建设和维护系统、IT/远程信息处理系统和连接和/或交付、安装和维护设备和产品的主体。上述接收者主体和类别的详细列表可在数据控制者的总部查阅。个人数据不会以任何方式泄露,除非根据透明管理立法在数据控制者的机构网站或 PA 网站上发布。
Decreto di riparto delle risorse - 预付款 - BANDO FIS
VISTA la Legge 7 年前 1990 年,n。第 241 章VISTA la Legge 2009 年 12 月 31 日,n。 196 “Lege di contabilità e finanza pubblica” e ss.mm.ii.; VISTA la Legge 2010 年 12 月 30 日,n。 240,连续修改,撤销“Norme in materia di Organizzazione delle Università, di individuale accademico e recrutamento, nonché delega al Governo per incentivare la qualità e l'efficienza del sistema universitario”,commodificata dall'articolo 64 del Decreto-legge 31 maggio 2021, n. 77,《Governance del Piano nazionale di ripresa e resilienza e prime misure di rafforzamento delle amministrative e di accelerazione e snellimento delle procedure》,convertito con modificazioni dalla L. 29 luglio 2021,n. 108(SO n. 26,相关 GU) 2021 年 7 月 30 日,n。 181); VISTO il Decreto Legislativo del 14 marzo 2013,n。 33、“Riordino della disciplina riguardante gli obblighi di pubblicità, trasparenza e spreade di informazioni da parte delle pubbliche amministrazioni”; VISTO il Decreto-legge del 9 gennaio 2020,n。 1(Gazzetta Ufficiale,Serie Generale,n. 6 del 9 gennaio 2020),“Disposizioni Emergencyi per l'istituzione del Ministryo dell'istruzione e del Ministryo dell'università e della Ricerca ”,convertito,con modificazioni,con Legge del 5 marzo 2020,n。 12; VISTO il DPCM n。 164 del 30 settembre 2020 (Gazzetta Ufficiale, Serie Generale n. 309 del 14 dicembre 2020), recante il Regolamento di Organizzazione del Ministryo dell'università e della Ricerca (di seguito, anche alone MUR) ed il DPCM n. 2020 年 30 月 165 日(Gazzetta Ufficiale,Serie Generale n. 309 del 14 dicembre 2020),“ Regolamento di Organizzazione degli Uffici di diretta collaborazione del Ministro dell'università e della Ricerca ”; VISTO il Decreto Ministryiale del 19 febbraio 2021 (Gazzetta Ufficiale, Serie Generale, n. 74 del 26 marzo 2021), recante l'individuazione e la definizione dei compiti degli uffici di livello dirigenziale non Generale del MUR; VISTA la Legge 2020 年 12 月 30 日,n。 178 “ Bilancio di previsione dello Stato per l'anno finanziario 2021 e bilancio pluriennale per il triennio 2021-2023 ” ed, in particolare, l'art.1 comma 551, il quale dispone che “...il Ministryo dell'università e della Ricerca si avvale di技术科学和专业能力、委员会的独立组织、技术科学分析、财务和管理控制以及验证、监控和控制的后续行动。 Gli oneri derivanti dall'attuazione del Presente comma, compresi quelli di cui all'articolo 5 del decreto-legge 25 settembre 2002, n. 212,convertito,con modificazioni,dalla Legge 2002 年 11 月 22 日,n。 268, sono posti a carico, nel limite Massimo del 7 per cento,该计划和计划的财务目标是该计划的目标。 Le disposizioni del Presente comma si applicano anche alle spese per
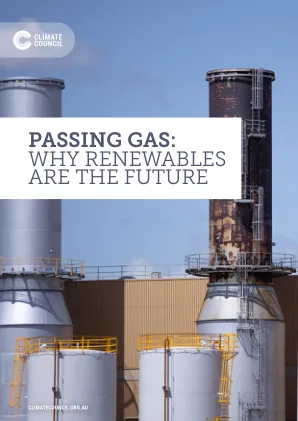
传递气体:为什么可再生能源是未来
间接影响(Biddle 等人,2020 年)。33 人在火灾中丧生(Bushfire Royal Commission,2020 年),另有 429 人估计死于森林大火烟雾(Johnson 等人,2020 年)。全国有 3000 多所房屋被烧毁(Bushfire Royal Commission,2020 年),约 30 亿脊椎动物死亡或流离失所(WWF Australia,2020 年)。数十种受威胁和非受威胁物种的保护状况可能会被重新审视,其中一些物种预计将灭绝(Ward 等人,2020 年;Wintle、Legge 和 Woinarski,2020 年),全国至少有 2430 万公顷土地被烧毁(Bushfire Royal Commission,2020 年)。仅在澳大利亚东部,就有面积与英格兰相当的地区被烧毁,面积接近 1300 万公顷(Wintle、Legge 和 Woinarski 2020 年)。澳大利亚还记录了有史以来最大的火灾,即 Gospers Mountain 特大火灾,仅火灾就烧毁了 50 万公顷土地(新南威尔士州政府 2020 年)。
U-MC/22 循环。 n.917/XIX Session/2022 致理事会......
3 因此,纪律委员会任期与相应地方工程师协会委员会任期相同的原则,受到《地方纪律委员会成员指定条例》第 7 条第 4 款规定的限制,根据该规定,任职期间的纪律委员会“行使其职能,直至新的纪律委员会有效成立”。 4 这主要涉及 2011 年 8 月 13 日第 138 号立法法令第 3 条第 5 款(经第 148/2011 号法律转换)、2011 年 11 月 12 日第 183 号法律第 10 条、2012 年 1 月 24 日第 1 号立法法令第 9 条(经第 27/2012 号法律转换)和 2012 年 8 月 7 日第 137 号总统令(“根据 2011 年 8 月 13 日第 138 号立法法令第 3 条第 5 款,经 2011 年 9 月 14 日第 148 号法律转换并经修订),包含专业法规改革的条例”)。 5 例如,参见文章。 43 及以下。皇家法令第 2537/1925 号。 6 除上述 CNI 通函 n.151/2012 外。
大学和研究部 - FIS致电
经理给定法律1990年8月7日,n。 241包含“有关管理程序的新规则和访问行政文件的权利”;鉴于2009年12月31日法律。 196“会计与公共财政法”和ss.mm.ii。普通n。 25)在第61条中建立了意大利科学基金;鉴于D.P.C.M.2024年8月8日,于2024年10月11日在审计师法院记录。 2611,他被授予博士Vincenzo di Felice研究总监研究总监的总体管理任务;