XiaoMi-AI文件搜索系统
World File Search SystemLo

道奇和RAM汽车进口商AEC欧洲欧洲调整了零件和配件部门的需求不断增长,外勤运营向Yusen Lo
道奇和RAM汽车进口商AEC Europe将零件和配件部门调整为需求不断增长,外勤运营向Yusen Logistics Benelux AEC外包是Fiat Chrysler Automobiles(FCA)的合作合作伙伴,而Dodge和RAM汽车的官方进口商和RAM汽车的官方进口商则是欧洲。一再完成创纪录的汽车销售数字后,对服务和备件的需求不断增长。因此,AEC Europe现在宣布其零件和配件部门的大幅扩展。AEC的服务为其欧洲经销商网络提供了500.000多种不同的OEM零件和配件,包括快速活动零件,备件,服务和维护零件,其自己的配件系列,专门为欧洲客户开发的特殊零件以及专用的配件组合,可在AEC车辆汽车处理中心的车辆订单上可用,该配件可在AEC汽车加工中心的Antwioum中安装。该部门使用全球供应商和专家网络来满足其合作伙伴需求的技术解决方案。为了使备件物流与需求不断增长,AEC决定将供应链,合并,物流运营和欧洲分销外包到全球物流解决方案提供商Yusen Logistics,该物流具有支持各种大型自动机动体的业务。AEC仓库设施最近从比利时的Kallo(比利时)搬到了Melsele(比利时),并保持了与安特卫普港的密切联系,提供高达3000平方米的存储空间。Yusen Logistics很高兴为AEC欧洲的备件物流运营。2021年1月25日结束''我们的主要目标之一是以一种非常灵活,有效的方式保持库存,使我们能够提高网络的服务水平,同时量身定制我们的库存根据特定的客户要求。这种方法有助于短期交付系统,并帮助我们控制成本。” AEC的零件和配件经理Daniele Rossa说与AEC一起,Yusen将建立一个欧洲配送中心,向AEC经销商网络提供售后备件。Yusen Logistics将执行海关清除活动,零件的接收控制,存储,重新包装以及开始交付。最新的AEC零件和配件目录可以在欧洲各地的130多家许可零售合作伙伴中访问。所有的AEC零件从小到大床,将存储在比利时Melsele的Yusen Logistics汽车仓库中。Yusen Logistics和AEC Europe期待着这项具有挑战性的设置的成功合作。

免疫检查点抑制与靶向疗法结合使用新型病毒样药物结合物在局部和远处肿瘤的鼠模型中诱导完全反应
摘要转移仍然是全球与癌症相关死亡的主要原因。因此,提高治疗疗效对这种肿瘤是至关重要的,这对于增强患者的生存至关重要。au-011(Belzupacap sarotalocan)是一种新的类似病毒的药物结合物,目前正在临床发育中,用于治疗眼睛中小脉络膜黑色素瘤和高风险不确定的病变。在光激活后,AU-011诱导了促炎和促性免疫原性的快速坏死细胞死亡,导致抗肿瘤的免疫反应。作为AU-011诱导全身性抗肿瘤免疫反应,我们研究了这种组合疗法是否也将有效地抵抗远处,未处理的肿瘤,作为通过潜线免疫作用治疗局部和远处肿瘤的模型。我们比较了将AU-011与几种不同检查点阻断抗体相结合的功效,以鉴定体内肿瘤模型中的最佳治疗方案。我们表明,AU-011通过释放和暴露与损伤相关的分子模式(DAMP)诱导免疫原性死亡,从而导致树突状细胞在体外成熟。此外,我们表明,随着时间的推移,AU-011在MC38肿瘤中积聚,并且ICI增强了AU-011对小鼠中既定肿瘤的功效,从而对所有带有单个MC38肿瘤的治疗动物的特定组合产生了完全反应。最后,我们表明AU-011和抗PD-L1/抗LAG-3抗体处理是潜线模型中的最佳组合,诱导了大约75%的动物的完全反应。我们的数据显示,将Au-011与PD-L1和LAG-3抗体相结合以治疗原发性和远处肿瘤的可行性。

•版本1.0。公开发布于2024年6月5日。推荐引用:Dworatzek,P.,Miller,E.,Lo,Kiona。,Howarth,E。和Kazubowski-Houston,S。2
•版本1.0。公共发布于2024年6月5日。推荐引用:Dworatzek,P.,Miller,E.,Lo,Kiona。,Howarth,E。和Kazubowski-Houston,S。2024。国家生态足迹和生物能力帐户,2024年版。(版本1.0)。[数据集和元数据]。与全球足迹网络合作,由约克大学生态足迹倡议为足迹数据基金会生产。https://footprint.info.yorku.ca/data/使用条款:在创意共享归因4.0国际许可下,该数据可以在任何媒介或格式中复制和重新分配材料,并可能在任何目的上进行混音,并在任何目的上构建材料,甚至在任何材料上均提供了任何属性,并且在任何媒介上都可以使用任何媒介,并且在任何媒介上均可以任何方式进行使用,并且在任何媒介上均可以任何方式进行使用,并且在任何媒介中都可以使用任何属性,并且属于conseribible in and conseribibe and Attribibe and Attribibe。学分:此版本是由Peri Dworatzek,Eric Miller,Kiona Lo,Elaine Howarth和Sandy Kazubowski-Houston在Footprint数据基金会及其科学咨询委员会的支持和方向以及York University的资金以及其环境与城市变化的资金以及其资助的。此版本受益于在生态足迹计划和全球足迹网络中的先前年度编码和研究人员的积累。该版本整合了来自全球统计数据的数据,该数据按年度以及国家或世界详细介绍了消费,生产,人口和经济参数。此版本还使用了经过同行评审的科学期刊和主题收藏的参数,并根据要求提供了完整的引用列表。Key sources include the International Energy Agency (IEA), the Food and Agriculture Organization (FAO) of the United Nations and its PopStat, ProdStat, TradeStat, ResourceStat, and FishStat databases, Sea Around Us, UN COMTRADE, CORINE Land Cover, Global Agro-Ecological Zones (GAEZ), Global Land Cover (GLC), Global Carbon Budget, World Bank, International Monetary Fund, and Penn World Tables.

第六届国际工业4.0国际会议和智能制造业2024年11月20日,布拉格(捷克共和国)会议时间:捷克共和国lo
。ISM 2024 General Co-Chairs Francesco Longo, MSC-LES – DIMEG, University of Calabria, Italy David Romero, Tecnológico de Monterrey, Mexico ISM 2024 Program Chair Vittorio Solina, MSC-LES – DIMEG, University of Calabria, Italy ISM 2024 Board of Advisors Agostino Bruzzone - University of Genoa, Italy - ISM Mentor Chair Michael Affenzeller - University of Applied Sciences Upper Austria, Austria -Former ISM General Co-Chair Weiming Shen - Huazhong University of Science and Technology, China - Former ISM General Co-Chair Luigi D'Oriano - Baker Hughes, Italy - Advisory Board Member – Corporate James C. Spohrer - ISSIP, ex-IBM - Advisory Board Member – Corporate Antonio Padovano - University of意大利卡拉布里亚 - 前ISM计划联合主席TuğrulÖzel -rutgers University-美国新不伦瑞克省 - 顾问委员会成员 - 北美Florinda Matos -Iscte Business School,葡萄牙dinâmia'cet -Iscte,葡萄牙 - 咨询委员会成员Radu Godina- Nova Godina- Nova Goda -Nova Science of Science and Dive -diva -div
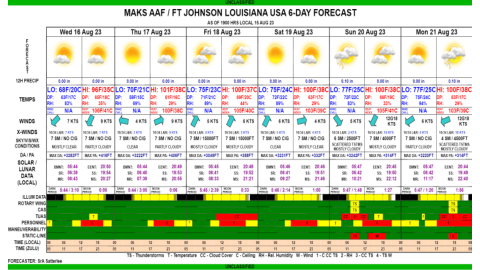
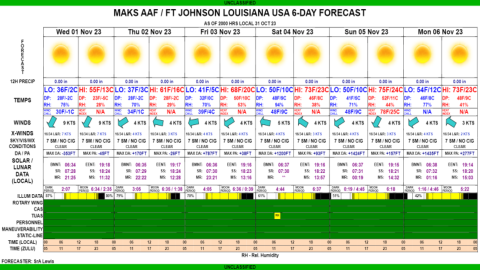
aaf/ft 约翰逊 美国路易斯安那州 6天预报
2023 年 11 月 1 日——LO:36F/2C HI:55F/13C LO:37F/3CHI:61F/16C LO:41F/5CHI:68F/20CLO:50F/10CHI:73F/23C LO:50F/10CHI:75F/24C|LO:54F/12CHI:73F/23C。
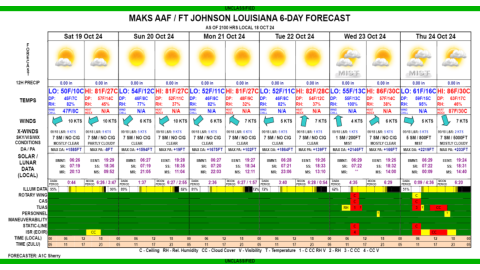
路易斯安那州约翰逊堡 6 天预报
2024 年 10 月 19 日 — LO:50F/10CHI:81F/27C LO:54F/12CHI:81F/27C|LO:52F/11CHI:81F/27C LO:52F/11CHI:82F/CHI:52F/183F| C|LO:61F/16C HI:86F/30C。

s y n t h e t i c b i o lo g y lo g y yarrowia lipolytica代谢,以有效合成从烧瓶到半纤维量表
Itaconic Acid是一种具有广泛应用的新兴平台化学物质。iTaconic酸目前是由曲霉通过生物发酵产生的。然而,曲霉是一种真菌病原体,需要额外的形态控制,使工业尺度上的岩性酸产生有问题。在这里,我们将普遍认为是安全的(GRAS)酵母Yarrowia脂溶剂来重新编程,以产生竞争性的iTaconic酸的产生。防止碳汇成脂质积聚后,我们在微调其生物合成途径的同时评估了线粒体内外的Itaconic酸的产生。然后,我们通过下调NAD +依赖性异位酸异位酸脱氢酶,通过弱启动子,RNA干扰或CRISPR干扰来模仿氮恢复条件下氮的限制。最终,我们在1升生物反应器中优化了批量培养的发酵参数,并在半脂肪量表上以50升生物反应器中的1升生物反应器中的130.1克滴度和94.8克每升产生了含酸的发酵参数。我们的发现提供了有效的方法来利用GRAS微生物Y.脂溶剂来用于竞争性工业规模生产Itaconic Acid。

RNP APCH 降至 LPV 最小值 - EGNOS 用户支持
“在 LO 表中新增的列中,几个 LO 被归类为‘基础知识 (BK)’” “这些 LO 将不再是专门考试题目的主题” “但是,学生飞行员仍然需要吸收 BK LO 所需的特定知识”