XiaoMi-AI文件搜索系统
World File Search SystemLoc
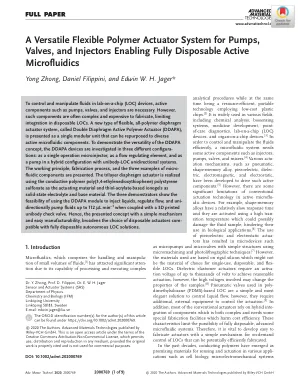
用于泵,阀门和喷油器的多功能柔性聚合物执行器系统,可实现完全一次性的活动微流体
分析程序虽然同时是采用低成本塑料芯片的一种资源有效的便携式技术。[2]它被广泛用于各个领域,包括化学分析,生物传感系统,医学开发,临时诊断点,实验室芯片(LOC)设备(LOC)设备和芯片上的器官。[3]为了有效地控制和操纵流体,微流体系统需要一些有源组件,例如喷油器,泵,阀门和混合器。[4]已经开发了各种作用机制,例如气动,形状 - 内存合金,压电,二电,电磁和静电,以驱动这种活性成分。[5]但是,在主动微型设备中,常规驱动技术存在一些显着的局限性。例如,形状内存合金的响应时间相对较慢,并且使用高转换温度激活,这可能会损害流体样品,从而阻碍其在生物应用中的使用。[6]使用压电和静电代理的使用导致了微型电视和使用微加工和光刻技术的简单结构等微型发言。[7]但是,所使用的材料基于刚性硅,这可能不是单次使用,一次性和屈曲loc的首选材料。介电弹性体执行器需要高达数千伏的电压以实现合理的致动,但是,所涉及的高电压可能会改变样品的性能。这些特征限制了完全一次性的高级微流体系统的可能性。[8]基于聚二甲基硅氧烷(PDMS)的LOC中使用的气阀是一种控制液体流量的简单,最优雅的解决方案,但是,它们需要其他外部设备来控制驱动。[9]此外,大多数常规执行器都依赖于组件的混合整体,这些组件既复杂又需要一些特殊的制造设施,以损害成本效率。因此,至关重要的是,使用简单的机制来开发易于制造的执行器,以对LOC进行按需控制,该机制可能有效地制造。在过去的几十年中,导电聚合物已成为各种应用中的感测和致动材料,例如细胞生物学,微电力学系统
音乐和音频视角 George Tzanetakis,大学......
集成机器学习 ● 声明式数据流架构(计算结构与执行分离) ● >200K LOC,> 1000 次引用 ● 2017 年左右停止积极开发


深硅蚀刻应用的无损斜面工艺集成解决方案
硅制造技术已成功应用于开发芯片实验室应用设备。最近,我们提出了针对单核苷酸多态性 (SNP) 检测的芯片实验室 (LoC) 系统 [1-2]。单核苷酸多态性 (SNP) 是指 DNA 序列中只有一个核苷酸的差异。每个人大约有 5 x 10 6 个 SNP [3- 4]。SNP 会导致人与人之间的差异,例如长度、头发和眼睛的颜色,但更重要的是,SNP 会导致对药物的反应和患病倾向的差异;因此,经济高效的 SNP 检测可以在个性化医疗保健中发挥重要作用。在我们提出的 LoC 系统中,主要组件是微柱过滤器、混合器、聚合酶链反应 (PCR) 腔和储液器。这些结构由 DSiE 制造。这些结构的目标深度为 250-300µm。

“汽车可靠软件设计面临的挑战...
动力传动系统:主要是闭环控制功能底盘控制:主要是闭环控制功能车身电子:主要是反应式、事件驱动功能信息娱乐:主要是反应式、事件驱动功能软件密集型 >>100k LOC
KFC 325 - Bendix/King
Bendixking.com › dam › 下载 PDF 2019 年 11 月 22 日 — 2019 年 11 月 22 日 Bendix/King 数字飞行控制系统AP LOC 360 ... 使 KFC 325 能够以最大可靠性确定空中...

KAP 140 - 卡莱尔飞行俱乐部
概述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2 KAP 140 双轴/高度预选自动驾驶仪系统 ..................................................................................................................................2 系统集成 ..................................................................................................................................................................................................................................4 电源应用和飞行前测试 ..................................................................................................................................................................................................................................8 KAP 140 单轴操作 .................................................................................................................................................. . . . . . . . . . . . . . . 9 系统操作模式. . . . . . . . . . . . . . . . . . . . 12 机翼水平器 (ROL) 模式. . . . . . . . . . . . . . . . . . . 12 航向选择 (HDG) 模式. . . . . . . . . . . . . . . . . 13 使用 DG 从 HDG 模式 (45° 截距) 进入导航 (NAV) 模式 . . . . . . . . . . . . . . . . . . . . 14 使用 DG 从 ROL 模式 (全角度截距) 进入导航 (NAV) 模式. ...
俄勒冈州主要街道网络战略计划概述
目标指标鼓励地方努力 - # 外联/宣传活动 - 使用年度报告 - # 主要奖项提名卓越表现 - # 奖项视频分享推广重点项目/活动 - 增加博客文章 - # 视频分享 - 拨款更新 - 年度报告 - TO 营销 - LOC、CAC