XiaoMi-AI文件搜索系统
World File Search SystemMITP
摩尔多瓦 IT 投资指南
Bloomcoding 如今的存在高度依赖于 MITP 的支持。我们的盈利状况和可观的增长直接得益于 IT 园区提供的优势。在成功说服 Mozaic 投资者集团参与我们的种子轮前融资后,我们成功拓展到国际市场,并最终完成了 100 万欧元的种子轮融资,这是该地区最强劲的交易之一。这一事实可以归因于与风险投资基金的深入讨论,凸显了 MITP 提供的竞争优势。从财务角度来看,IT 园区的 100 万欧元优于欧洲的 350 万欧元。我们对未来抱有远大而务实的目标;我们的目标是建立摩尔多瓦的第一个独角兽企业。这一愿景的动力来自于培育蓬勃发展的初创企业生态系统的愿望,而本地杰出人才和针对新兴企业家的鼓励性财政政策将推动这一愿景的实现。

摩尔多瓦的投资机会:通往……的门户
1. 信息和通信技术 (ICT 和 BPO):摩尔多瓦的 IT 行业正在经历快速增长,这得益于现代化的基础设施和高技能、多语言的劳动力。专门从事软件开发、人工智能和数字服务的日本公司可以从具有竞争力的运营成本和技术领域扩张的机会中受益。摩尔多瓦创新技术园区 (MITP) 以提供独特的财政制度和 7% 的统一税率脱颖而出,使其成为希望提高数字和技术能力的公司的理想选择。2. 农业综合企业和食品加工:该国 12% 的 GDP 来自农业,在食品生产和加工方面具有巨大的潜力。参与可持续农业和农业的日本公司
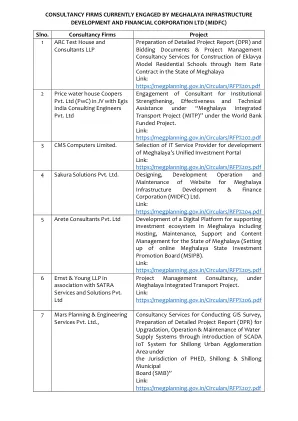
MIDFC 顾问
聘请世界银行资助项目“梅加拉亚邦综合交通项目 (MITP)”的机构加强、效率和技术援助顾问。链接:https://megplanning.gov.in/Circulars/RFP%202.pdf 3 CMS Computers Limited. 选择 IT 服务提供商来开发梅加拉亚邦统一投资门户 链接:https://megplanning.gov.in/Circulars/RFP%203.pdf 4 Sakura Solutions Pvt. Ltd. 为梅加拉亚邦基础设施发展和金融公司 (MIDFC) 有限公司设计、开发运营和维护网站。链接:https://megplanning.gov.in/Circulars/RFP%204.pdf 5 Arete Consultants Pvt. Ltd 为梅加拉亚邦开发数字平台以支持投资生态系统,包括为梅加拉亚邦提供托管、维护、支持和内容管理(建立在线梅加拉亚邦投资促进委员会 (MSIPB))。链接:https://megplanning.gov.in/Circulars/RFP%205.pdf 6 安永会计师事务所与 SATRA Services and Solutions Pvt. Ltd 合作