XiaoMi-AI文件搜索系统
World File Search SystemMPC

Goos-hänchenShift在空间上解析了磁质晶体的磁光kerr效应
摘要:我们报告了如何使用对全尼克磁性磁性晶体(MPC)的斜向磁磁光(TMOKE)增强的空间来解决空间解析横向磁光kerr效应(TMOKE)增强的观察。首先,MPC中表面等离子体的激发导致15.3μm(18λ)GH偏移。然后,在存在横向磁场的情况下,在实验中,由GH偏移引起的反射光的侧向空间强度分布的调制[Tmoke(x)]达到4.7%。与MPC中常规TMOKE测量值相比,空间解析的Tmoke(X)值高几倍。在GH偏移下,空间分辨的磁光效应的概念可以进一步扩展到其他磁极纳米版本,以增强磁光效应,传感和光调制应用。关键字:鹅 - ha nchen换移,磁性粒细胞,磁性晶体,表面等离子体,横向磁光kerr效应■简介


SodsMPC:基于 FSM 的匿名和私有量子安全智能合约
摘要 —SodsMPC 是一个量子安全的智能合约系统。SodsMPC 许可服务器(验证节点)通过安全多方计算 (MPC) 协议执行合约。MPC 确保合约执行的正确性,同时轻松保护数据隐私。此外,SodsMPC 实现合约业务逻辑隐私,同时保护合约用户匿名身份。我们用有限状态机 (FSM) 表达合约的逻辑。FSM 的状态转换用具有秘密共享系数的盲多项式表示。当使用 MPC 计算这个盲多项式时,就获得了合约业务逻辑隐私。这些控制逻辑的系数是二进制秘密共享。我们还提出了一种通过 MPC 在二进制和整数秘密共享之间进行基本转换的方法。我们的合约匿名性来自“混合然后合约”范式。 SodsMPC 混合的在线阶段是预处理置换矩阵与秘密共享形式的输入向量之间的乘法,它实现了输入的完全随机化混洗,并保持秘密共享形式以供后续合约执行。所有 SodsMPC 组件(包括可验证秘密共享方案)都是量子安全的、异步的、可应对 t < n/ 3 个受损服务器,并且在预处理和在线阶段都具有鲁棒性(可容忍拜占庭服务器)。索引术语 — 多方计算、私人智能合约、有限状态机、匿名混合、量子安全
从能源三难困境角度回顾微电网能源管理策略
摘要:能源行业正在经历从发电到消费端各个阶段的范式转变。由于可再生能源 (RES) 渗透率的提高、监测和控制技术的进步以及配电系统组件的主动性,实现了经济实惠、灵活、安全的供需平衡,从而推动了微电网 (MG) 能源系统的发展。RES 的间歇性和不确定性以及 MG 组件(例如不同类型的能源发电源、储能系统、电动汽车、加热和冷却系统)的可控性是部署高效能源管理系统 (EMS) 所必需的。多智能体系统 (MAS) 和模型预测控制 (MPC) 方法在最近的研究中得到了广泛应用,其特点可以解决大多数 EMS 挑战。这些方法的优势在于 MAS 的独立特性和性质、MPC 的预测性以及它们提供经济实惠、灵活和安全的 MG 操作的能力。因此,本篇最新综述首次对 MG 控制和优化方法及其目标进行了分类,并有助于从能源三难困境(灵活性、可负担性和安全性)的角度理解 MG 运营和 EMS 挑战。主要确定和讨论了使用 MAS 和 MPC 方法可实现的控制和优化架构。此外,还提出了 MG-EMS 未来研究建议,涉及与 MAS、MPC 方法、稳定性、弹性、可扩展性改进和算法开发相关的能源三难困境,以造福研究界。

森林流:预测Lyman-α森林聚类从线性到非线性尺度
在大范围内,Lyman-α森林提供了对宇宙膨胀历史的见解,而在小尺度上,它对生长历史,暗物质的性质和中微子质量的总和施加了严格的限制。这项工作引入了ForestFlow,这是一个新颖的框架,它弥合了大型和小规模分析之间的差距,这些分析传统上依赖于不同的建模方法。使用条件归一化的流量,ForestFlow预测了两种lyman-α线性偏见(Bδ和Bη)和六个参数,描述了三维频谱功率谱(P 3D)的小规模偏差(p 3D),从线性理论作为体体和核学中培养基的功能。随后将它们与Boltzmann求解器相结合,以对P 3D和从其衍生的任何其他统计数据进行一致的预测,从任意大的尺度到非线性制度。在30个固定和分配的宇宙流体动力学模拟的套件中训练,跨越z = 2至4.5的红移,森林流在描述P 3D和一维闪光功率谱(p 1d)中获得了3和1.5%的精度,从线性量表到k = 5 mpc- = 5 mpc- = 5 mpc-k. = 5 mpc-k. = 4 mpc- = 4 mpc = 4 Mpc = 4 mpc = 4 mpc。由于其条件参数化,森林流对电离历史和两个λCDM模型扩展(大量中微子和曲率)显示出相似的性能,尽管训练集中都不包含这些扩展。该框架将对DESI调查的Lyman-α森林测量结果进行全面宇宙学分析。

MIT开放访问文章学习模型预测...
摘要:模型预测控制(MPC)中的调整参数提出了重大挑战,尤其是当控制器的预测与闭环工厂的实际行为之间存在明显差异时。这种不匹配可能源于诸如实质性模型植物差异,不涵盖整个关注时间的预测范围有限或无法预见的系统干扰等因素。这种不匹配会危害性能和安全性,包括限制满意度。传统方法通过修改有限的地平线成本函数来解决此问题,以更好地反映总体运营成本,从数据中学习预测模型的部分或实施强大的MPC策略,这些策略可能是计算密集型或过于谨慎的。作为替代方案,已经提出了直接优化或学习控制器参数以增强闭环性能。我们将贝叶斯优化应用于有效学习未知模型参数和参数化约束词语项,旨在提高电池快速充电的闭环性能。这种方法建立了一个层次控制框架,其中贝叶斯优化直接对全球和长期目标进行微调闭环行为,而MPC则处理较低级别的短期控制任务。对于锂离子电池快速充电,我们表明学习方法不仅可以确保安全操作,而且还可以最大程度地提高闭环性能。这包括将电池的操作保持在其最大端子电压下方,并减少充电时间,所有这些都使用标准的标称MPC模型以短层和显着的初始模型植物不匹配而实现。
物理计算任何布尔函数
安全的多方计算(MPC)是CRYP-图表中最积极研究的领域之一,该领域研究了多方如何在不透露其私有信息的情况下比较其私人信息。MPC中最古典的问题之一涉及以下设置。爱丽丝和鲍勃想知道他们是否彼此喜欢。但是,由于拒绝尴尬,没有人愿意首先承认。他们需要一个协议,该协议仅区分彼此喜欢的两种情况,而没有泄漏任何其他信息。从理论上讲,此设置等效于计算两个输入位的逻辑和函数,一个来自每个播放器。除了和功能外,其他经过广泛研究的布尔函数还包括逻辑XOR函数,多数函数(确定输入中是否有1s比0)和等效函数(确定所有输入是否相等)。而不是数字协议,许多研究人员使用在日常生活中发现的便携式对象(例如卡,硬币和信封)开发了MPC的物理协议。这些协议的好处是它们不需要计算机,还允许外部观察者验证所有各方如实地执行它们(这通常是一个具有挑战性的
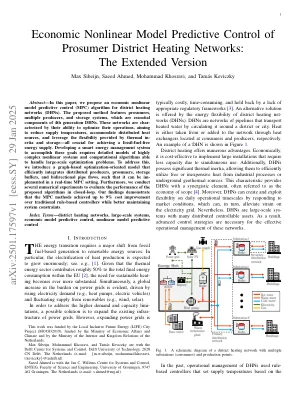
经济非线性模型预测性控制造船区供暖网络:扩展版本
摘要 - 在本文中,我们提出了一种用于地区供暖网络(DHNS)的经济非线性模型预测控制(MPC)算法。所提出的方法具有生产者,多个生产者和存储系统,这是第四代DHN的重要组成部分。这些网络通过它们优化其运营的能力,旨在降低供应温度,适应分布式的热源以及利用热含量和存储提供的灵活性,这对于实现化石燃料燃料的能源供应至关重要。开发一个智能能源管理系统来实现这些目标,需要高度复杂的非线性系统和能够处理大规模优化问题的详细模型。为了解决这个问题,我们引入了一个基于图的优化模型,该模型有效地集成了分布式生产者,生产者,存储缓冲区和双向管流,以便可以在实时MPC设置中进行影响。此外,我们进行了几个数值实验,以评估闭环中提出的算法的性能。我们的发现表明,MPC方法比传统的基于规则的控制器获得了多达9%的成本提高,同时更好地维护系统限制。
能量
摘要:本文旨在通过采用多个最佳能量控制器,展示预测随机负载对提高具有储能系统 (ESS) 的低压 (LV) 网络性能的重要性。考虑到橡胶轮胎龙门起重机 (RTG) 所需的高度随机行为,本研究开发并比较了基于滚动点预测模型的模型预测控制器 (MPC) 和基于随机预测需求模型的随机模型预测控制器 (SMPC) 的最佳能量控制器,作为最小化需求不确定性影响的潜在合适方法。将提出的 MPC 和 SMPC 控制模型与具有完美和固定负载预测曲线的最佳能量控制器以及标准设定点控制器进行了比较。结果表明,与传统控制算法相比,利用负载预测的最佳控制器可以改善峰值降低并节省存储设备的成本。对滚动时域控制器 MPC 和 SMPC 进行了进一步改进,以更好地处理起重机需求的波动性。此外,还提出了最佳控制器的计算成本分析,以评估预测最佳控制系统实际实施的复杂性。

这是真正的驱动程序,还是只是机器人?人...- lirias
使用移动式驱动模拟器进行了一个型型人类实验,其中40名参与者,由26名男性和14个女性组成,平均年龄为34.33岁。使用了受试者间的设计,而参与者的人口统计学的分配在群体之间达到了很好的平衡。参与者首先经历了人类驱动的基线,然后是由同一人类驾驶员或AV Conloller进行的其他动作。然后,要求参与者将驾驶行为分类为人类或自动化,并在1到5的李克特量表上提供信心评级。测试了两种类型的控制器:标准模型预测控制器(MPC)和一个名为drividoc的控制器(从视觉从视觉驱动到可区分的最佳控制),以前在人类驾驶示范中训练了端到端模仿学习与MPC结合使用的人类驱动示范。此控制器会根据从相机图像中提取的驾驶上下文自动调整MPC成本函数PA-RAMETER。有关drividoc的更多详细信息可以在[1]中找到。