XiaoMi-AI文件搜索系统
World File Search SystemMPU6050
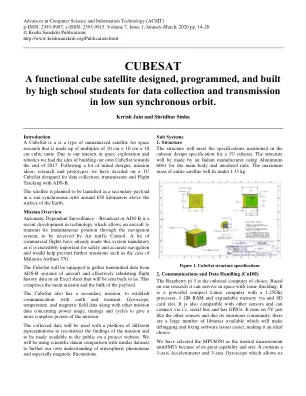
立方体卫星
3.4。”InvenSense Inc.,2013 年 8 月 19 日。[12]“MPU6050。”Elementz Engineering Guild Pvt Ltd.,www.elementzonline.com/image/cache/catalog/data/products/Se nsors%20and%20Modules/Accelerometers/MPU6050/sku_154602_2-500x500.jpg。[13]“NEO 6M。” NEO-6M GPS 模块,创客门户,images.squarespace- cdn.com/content/v1/59b037304c0dbfb092fbe894/156113568290 6- WWEYOIG7JWB7N7W2NKEE/ke17ZwdGBToddI8pDm48kC JYY-h00dNzpJuBIa- 665MUqsxRUqqbr1mOJYKfIPR7LoDQ9mXPOjoJoqy81S2I8 N_N4V1vUb5AoIIIbLZhVYxCRW4BPu10St3TBAUQYVKcX CfBfm0f5Ee_9WQJsxv3IHUyKDPayImqZ- wIZeZ3phkwVjVAetzDTY9s_x8A- rhc/neo6m_main.JPG?format=2500w。[14]“在线图表软件和可视化解决方案。”Lucidchart,

在MPU 6050
MPU6050是一种6轴运动传感器,它集成了3轴加速度计和3轴陀螺仪,通常用于运动跟踪和方向检测。虽然加速度计提供了准确的长期角度测量值,但易于噪声,而陀螺仪则提供稳定的短期数据,但随着时间的推移会流动。为了解决这些局限性,实现了一个互补的过滤器来融合两个传感器的优势,从而实现了可靠和平滑的角度估计。本文描述了使用Arduino平台和MPU6050传感器的互补过滤器的集成。该方法将基于加速度计的倾斜读数与陀螺式角速度数据结合在一起,以实时计算方向。该方法在计算上是轻巧的,使其适用于具有有限处理功能的系统,例如Arduino。此实现适用于各个领域,包括机器人,无人机和可穿戴运动跟踪设备。

轮椅跌倒检测
跌倒是轮椅使用者可能遭遇的最坏情况之一。随着越来越多的人使用轮椅,跌倒检测设备的需求也日益迫切。由于传感器网络和物联网 (IoT) 的快速发展,人机交互与传感器融合已被视为解决跌倒检测问题的可行方法。本研究提出了一种防止轮椅跌倒的装置。这种轮椅跌倒检测系统的想法是确定用户的位置或算法的位置是否表明可能跌倒。本研究中最重要的因素是能够识别轮椅使用者的动作,以确定他们何时需要亲人或护理人员的帮助。该计划声称,通过检测一个人的跌倒情况并通过安全应用程序通过电子邮件提醒他们,它可以在紧急情况下协助提供帮助。如果发生任何严重损害,它可以帮助避免可能危及生命的危险。该系统的组件 - 一个可配置为调节每个电路及其功能的 6 轴 MPU6050 陀螺仪/加速度计传感器和一个 ESP8266 NodeMCU wifi 模块 - 允许产品尽可能远地连接到 Blynk 应用程序和控件。
与ECG,SCG,SPO2 ...
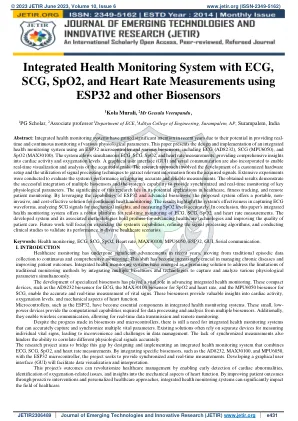
1 PG Scholar,2副教授1 ECE副教授,1 Aditya工程学院,Surampalem,AP,AP,Surampalem,印度摘要:综合健康监测系统近年来由于其提供实时和对各种生理学参数的持续监测的潜力而引起了极大的关注。 本文使用ESP32微控制器和各种生物传感器,包括ECG(AD8232),SCG(MPU6050)和SPO2(MAX30100),介绍了集成健康监测系统的设计和实施。 该系统允许同时进行ECG,SCG,SPO2和心率测量值,从而为心脏活动和氧合水平提供了全面的见解。 还合并了图形用户界面(GUI)和串行通信,以实现对获得信号的实时可视化和分析。 研究方法涉及开发自定义的硬件设置以及信号处理技术从获得的信号中提取相关信息的利用。 进行了广泛的实验,以评估系统在捕获准确可靠的测量方面的性能。 获得的结果证明了多个生物传感器的成功整合以及系统提供对关键生理参数的同步和实时监测的能力。 这项研究的重要性在于其在医疗保健,健身跟踪和远程患者监测中的潜在应用。 通过利用ESP32和高级生物传感器的功能,该系统提供了一种便携式,非侵入性且具有成本效益的解决方案,可用于连续健康监测。1 PG Scholar,2副教授1 ECE副教授,1 Aditya工程学院,Surampalem,AP,AP,Surampalem,印度摘要:综合健康监测系统近年来由于其提供实时和对各种生理学参数的持续监测的潜力而引起了极大的关注。本文使用ESP32微控制器和各种生物传感器,包括ECG(AD8232),SCG(MPU6050)和SPO2(MAX30100),介绍了集成健康监测系统的设计和实施。该系统允许同时进行ECG,SCG,SPO2和心率测量值,从而为心脏活动和氧合水平提供了全面的见解。还合并了图形用户界面(GUI)和串行通信,以实现对获得信号的实时可视化和分析。研究方法涉及开发自定义的硬件设置以及信号处理技术从获得的信号中提取相关信息的利用。进行了广泛的实验,以评估系统在捕获准确可靠的测量方面的性能。获得的结果证明了多个生物传感器的成功整合以及系统提供对关键生理参数的同步和实时监测的能力。这项研究的重要性在于其在医疗保健,健身跟踪和远程患者监测中的潜在应用。通过利用ESP32和高级生物传感器的功能,该系统提供了一种便携式,非侵入性且具有成本效益的解决方案,可用于连续健康监测。结果突出了系统在捕获ECG波形,分析机械见解的SCG信号以及准确测量SPO2水平方面的有效性。总而言之,本文的综合健康监测系统提供了一个可靠的平台,用于对ECG,SCG,SPO2和心率测量的实时监测。开发的系统及其相关的方法具有前进的医疗保健技术和提高患者护理质量的希望。未来的工作将着重于扩展系统的功能,完善信号处理算法以及进行临床研究以验证其在各种医疗保健方案中的表现。关键字:健康监测,ECG,SCG,SPO2,心率,MAX30100,MPU6050,ESP32,GUI,串行通信。

基于人工智能的空中手势键盘
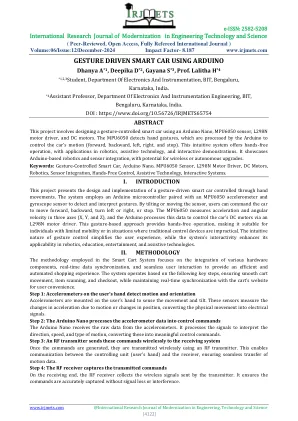
印度迈索尔 Vidhyavardhaka 工程学院计算机科学系助理教授 5 摘要:目前已经存在许多手势识别系统,但在许多系统中,用户必须记住许多不同的手势符号,这使得识别变得非常困难。在本文中,我们仔细研究了人工智能在医疗保健领域的贡献,开发了一种使用手势与计算机通信的系统,该系统在技术上具有重要意义,也有助于视障人士。基于人工智能的空中手势键盘是一种包括空中书写的模型,它对于不允许用户在键盘上打字的用户界面特别有用。该系统使用与加速度计接口的 Arduino 板。它具有组合程序结构,可根据需要识别字母和数字。该模型维护一个数据集,以便以不同的方式实现每个手势,系统使用相同的手势进行多次训练以识别。然后可以分配此手势在计算机上执行任务,并使用算法从用户那里挑选输入。关键词:手势、人工智能、arduino、MPU6050。

带有蓝牙和NRF24L01+ Communication的Arduino控制的多功能机器人
本文概述了高级机器人系统的设计和开发,该系统将硬件实现与理论模拟集成在一起,以满足各种环境中多功能和用户友好的机器人解决方案的需求。解决现有机器人系统中适应性有限的问题时,我们提出了一个无线,语音和手势控制的机器人车,其集成的机器人臂能够执行复杂的任务,例如线条跟随,避免障碍物,对象操纵,对象操纵和自主导航,并在单公里范围内执行自主导航。为了提高运营效率和用户参与,本文设计了一个多功能机器人平台,将用户友好的控制接口与廉价,最先进的传感器技术集成在一起。为了实现这一目标,我们集成了各种传感器,包括用于精确距离测量的超声传感器,用于对象检测和线条跟随的红外传感器,用于控制齿轮电动机的L298电动机驱动器,用于控制机器人臂的伺服电机,用于链球控制的螺纹传感器的伺服电动机,用于链球控制的弹性传感器以及MPU6050 ACCELEREMER的距离识别途径。该系统还使用定制的蓝牙应用程序进行远程控制,NRF24L01+用于远程无线控制,以及Arduino Mega和Nano进行处理和控制功能。结果证明了该机器人在动态条件下的功能很好,并且可以在医院中使用,以帮助医疗保健专业人员,餐馆提供食品交付以及在工业环境中进行对象操纵。在现实世界中,系统的设计证明了强大的功能,从而可显着提高可访问性和操作效率。这项研究与可持续发展目标(SDGS)3(健康与福祉),9(行业,创新和基础设施)和17(目标的合作伙伴关系)保持一致。机器人部门在医疗保健环境中的潜在应用可持续发展可持续发展目标3,其对工业生产力提高SDG 9的贡献以及与科技公司的合作,以扩展和提高机器人的能力促进SDG17。