XiaoMi-AI文件搜索系统
World File Search SystemMediaPipe

智能耕种机器人用于检测工厂...
Sivakasi的P.S.R工程学院。 摘要:手势识别对于在人类计算机互动(HCI)领域的业务4.0技术的发展被认为很重要;它允许计算机捕获和解释手势以执行命令而无需物理触摸设备。 媒体管道提供了预先训练的手模型,用于在实时视频流中提取重要的符号和手势特征。 这些核心功能提供了对专有机器学习模型的访问权限。 OpenCV(开源计算机视觉库)是一个开源计算机视觉和机器学习库。 它为与计算机视觉,图像处理和视频分析有关的各种任务提供了各种工具,功能和算法。 通过手势识别,媒体管道和OPENCV的整合为人类计算机相互作用的重大进步铺平了道路。 该项目探讨了这种新技术的使用来实现对人类运动的快速翻译和响应。 手势识别具有广泛的激动人心的应用程序,从提高可访问性到改变游戏体验和互动体验。 1。 在人类计算机互动的不断发展的景观中引言,理解和反应手势的能力是一个非凡的边界。 手势识别提供了人类与技术之间的无缝和直观的沟通方式。 它不仅可以增强可访问性,而且还可以为一系列应用程序打开门,从虚拟鼠标控制到交互式游戏体验。Sivakasi的P.S.R工程学院。摘要:手势识别对于在人类计算机互动(HCI)领域的业务4.0技术的发展被认为很重要;它允许计算机捕获和解释手势以执行命令而无需物理触摸设备。媒体管道提供了预先训练的手模型,用于在实时视频流中提取重要的符号和手势特征。这些核心功能提供了对专有机器学习模型的访问权限。OpenCV(开源计算机视觉库)是一个开源计算机视觉和机器学习库。它为与计算机视觉,图像处理和视频分析有关的各种任务提供了各种工具,功能和算法。通过手势识别,媒体管道和OPENCV的整合为人类计算机相互作用的重大进步铺平了道路。该项目探讨了这种新技术的使用来实现对人类运动的快速翻译和响应。手势识别具有广泛的激动人心的应用程序,从提高可访问性到改变游戏体验和互动体验。1。在人类计算机互动的不断发展的景观中引言,理解和反应手势的能力是一个非凡的边界。手势识别提供了人类与技术之间的无缝和直观的沟通方式。它不仅可以增强可访问性,而且还可以为一系列应用程序打开门,从虚拟鼠标控制到交互式游戏体验。手势识别是一个引人入胜且迅速前进的计算机视觉和人类计算机互动(HCI),重点介绍了手工运动和计算机系统的解释和理解。计算机能够识别并响应用户做出的手势,该手势用于与系统交互。手势识别是一种使计算机解释和理解人类手势和手势的技术,

使用 OpenCV 和 Mediapipe 的 AI 虚拟画家
摘要 — 手势识别对于人机交互 (HCI) 非常重要。与整个人体相比,人的手非常小,连接复杂,因此识别人手并非易事。通过使用手势识别,可以检测到手的点/坐标,从而实现许多不可能的事情。我们的工作表明了这样一个发现,即虚拟画家。在我们的项目中,主要目标是在显示器屏幕上显示我们在网络摄像头前空中书写的文字。这是通过计算机的普通网络摄像头识别人手来实现的,并使用 MediaPipe Python 库检测手势点。使用检测到的手势点存储张开的手指数。当食指和中指张开时,表示处于选择模式,而当只有食指张开时,则处于绘图模式。在选择模式下,我们可以从屏幕上显示的颜色列表中选择要绘制的颜色。绘图模式是将现场在摄像机前书写的内容绘制在监视器屏幕上。这种实现方式可以应用在许多需要立即执行或解释的地方。

使用MediaPipe和OpenCV -IJRPR
随着技术的快速发展,电子产品每天都在越来越小。现在有无线设备。这项研究提出了一种机制,该机制可能会导致一些将来会塑造HCI(人为计算机相互作用)的小工具。这个想法是使用手势识别来创建虚拟鼠标。目标是用简单的摄像头替换传统或普通的鼠标设备,以控制鼠标光标的功能。仅使用相机,虚拟鼠标可作为用户和计算机之间的管道起作用。它促进了鼠标功能,并允许用户与机器连接,而无需任何物理或机械设备。使用网络摄像头或内置摄像头拿着彩色帽子或彩色粘纸纸,使用这种手势识别技术很有可能记录和跟踪手的指尖。系统将跟踪手的颜色和移动,并与之同时移动光标。通常,我们使用鼠标,键盘或其他交互设备,这些设备主要与计算机计算机紧凑。无线设备还需要电源和连接技术,但是在本文中,用户的裸手是使用网络摄像头的唯一输入选项。因此,这是控制鼠标光标的一种非常互动的方法。使用基于计算机愿景的库OpenCV以Python编程语言实现此系统。该系统有可能替换典型的鼠标和机器的遥控器。唯一的障碍是照明条件。这就是为什么系统仍然不足以替换传统鼠标的原因,因为大多数计算机都在较差的照明条件下使用。
使用Mediapipe进行统一的计算机视觉的空气画布...
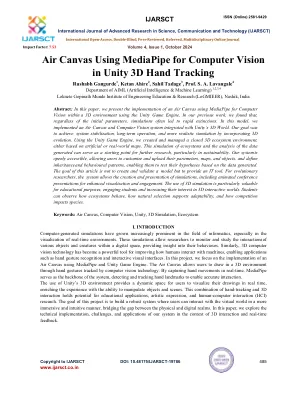
摘要:在本文中,我们使用Mediapipe使用MediaPipe使用Unity Game Engine介绍了用于在3D环境中的计算机视觉的实现。在我们以前的工作中,我们发现,无论最初的参数如何,模拟通常都会导致快速灭绝。在此模型中,我们实施了与Unity的3D世界集成的空气画布和计算机视觉系统。我们的目标是通过合并3D演化来实现系统稳定,长期操作和更现实的模拟。使用Unity Game Engine,我们根据人工或现实世界地图创建并管理了一个封闭的3D生态系统环境。对生态系统的模拟和生成的数据分析可以作为进一步研究的起点,尤其是在可持续性方面。我们的系统公开访问,允许用户自定义和上传其参数,地图和对象,并定义继承和行为模式,从而使他们能够根据生成的数据来测试其假设。本文的目标不是创建和验证模型,而是提供IT工具。对于进化研究人员,该系统允许创建和呈现模拟,包括动画会议演示文稿,以增强可视化和参与度。使用3D模拟对于教育目的特别有价值,吸引学生并增加对3D互动世界的兴趣。学生可以观察生态系统的行为,自然选择如何支持适应性以及竞争如何影响物种。关键字:空气画布,计算机视觉,统一,3D模拟,生态系统

使用OpenCV,MediaPipe
---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract - Hand gesture recognition offers a natural, touchless method for controlling digital devices, enhancing accessibility and user experience.该项目使用Python,OpenCV和MediaPipe实现虚拟鼠标,通过实时视频提要跟踪手动运动,从而实现了移动,点击和屏幕截图(例如移动,点击和屏幕截图)。利用MediaPipe的预训练的手工标志性模型,该系统确保了准确的手势检测,可为机动性有限或触摸限制环境的用户提供响应式,无提交互。使用虚拟和增强现实,游戏和遥控器中的应用程序,该项目突出了计算机视觉和机器学习的潜力,以提供高效的,无创的人类计算机接口。

使用MediaPipe和...
1副教授,2,3 BCA学生摘要:云存储是云计算最重要的服务之一,可以帮助云用户打破限制资源的瓶颈,并在不升级设备的情况下扩展其存储空间。为了保证云用户的安全性和隐私,数据总是以加密形式外包。但是,加密的数据可能会浪费云存储,并使授权用户之间的数据共享复杂化。我们仍在使用重复数据删除的数据存储和管理面临挑战。传统的重复数据删除方案始终专注于特定的应用程序方案,其中重复数据删除由数据所有者或云服务器完全控制。他们无法根据数据敏感性的水平灵活满足数据所有者的各种需求。在本文中,我们提出了一种异质数据存储管理方案,该方案在多个云服务提供商(CSP)的同时灵活地提供了重复数据删除管理和访问控制。我们通过安全分析,比较和实施来评估其性能。结果表明其对潜在实际用法的安全性,有效性和效率。索引项 - DATA重复数据删除,云计算,访问控制,存储管理

带有重新构造的预处理MediaPipe关键点和孤立的手语识别的锚点
抽象孤立的手语识别(ISLR)的目的是将标志分类为相应的光泽,但由于快速运动和小动手变化,它仍然具有挑战性。基于姿势的方法,由于其对环境的鲁棒性而引起了人们的注意,这对于这种挑战性的运动和变化至关重要,这是由于难以从嘈杂的关键点捕获小的关节运动。在这项工作中,我们强调了预处理关键以减轻此类错误风险的重要性。我们使用锚点采用归一化来准确跟踪骨骼接头的相对运动,重点是手动运动。此外,我们实施双线性插值来重建关键点,特别是为了检索未检测到的手的缺失信息。这项工作中提出的预处理方法表明,通过在WLASL数据集上的数据增强,准确性提高了6.05%,并且在基于姿势的方法中最高的数据增加了准确性83.26%。所提出的方法显示出在手部形状重要性的迹象的情况下,尤其是当某些框架没有被发现的手时。

MediaPipe框架确定面部和手的针灸血...
图1。a)21个手敲门坐标在检测到的手部区域内的坐标,b)468 3D面对地标和c)33个车身地标位置,分别使用Mediapipe Hand,Facemesh和姿势解决方案。 为了解决这个问题,我们将手分为四个姿势,即前部,内部,外部和背面,以增强穴位检测过程的准确性和可靠性。 为此,为了确定棕榈正常,我们在棕榈的平面内选择了三个点。 地标0用作我们的参考点,我们用它来计算向量1和2。 通过采用这些向量的交叉产物,我们获得了棕榈正常(图 2)。 最后,我们计算z方向和棕榈正常之间的角度。 此角度有助于我们区分不同的手姿势。 脸部使用了相同的方法。 通过使用MediaPipe提供的地标坐标,可以通过应用简单的数学和代数方程(例如等式1和eq.2)来得出兆头位置是可行的。 这些计算基于地标和特定穴位位置之间的相对距离和角度。a)21个手敲门坐标在检测到的手部区域内的坐标,b)468 3D面对地标和c)33个车身地标位置,分别使用Mediapipe Hand,Facemesh和姿势解决方案。为了解决这个问题,我们将手分为四个姿势,即前部,内部,外部和背面,以增强穴位检测过程的准确性和可靠性。为此,为了确定棕榈正常,我们在棕榈的平面内选择了三个点。地标0用作我们的参考点,我们用它来计算向量1和2。通过采用这些向量的交叉产物,我们获得了棕榈正常(图2)。最后,我们计算z方向和棕榈正常之间的角度。此角度有助于我们区分不同的手姿势。脸部使用了相同的方法。通过使用MediaPipe提供的地标坐标,可以通过应用简单的数学和代数方程(例如等式1和eq.2)来得出兆头位置是可行的。这些计算基于地标和特定穴位位置之间的相对距离和角度。

卷积瑜伽姿势估计器
实时身体姿势估计是计算机视觉中的关键组件,在各个域中找到了应用程序。这项研究深入研究了OpenCV和Mediapipe的合并,这是两个可靠的库,以实时实现精确有效的人体姿势估计。OpenCV以其计算机视觉功能而闻名,与MediaPipe联手,该公司提供了预先训练的机器学习模型,该模型明确制作了用于关键点的估计。这项合作能够准确检测和持续跟踪人体地标。该研究的方法是利用OpenCV的能力来管理视频输入和采用MediaPipe的姿势估算模型,以识别解剖关键。OpenCV负责重要的视频流操作,例如框架调整大小,颜色空间转换和降低噪声,优化了MediaPipe的专用模型的输入数据。随后,MediaPipe精巧地查明并跟踪关键的身体接头,从而赋予实时视频流或相机馈送中复杂人类姿势的实时估计。对该系统的全面评估包括对其准确性,实时性能和在不同条件下的鲁棒性的审查,包括遮挡和不同环境环境的情况。该系统在检测和持续跟踪关键点的功效,再加上其实时功能,揭示了其在多方面应用中的潜力,例如Sports Analytics,Healthcare,Healthcare,Human-Computer互动等。OpenCV和MediaPipe的融合封装了实时姿势估计的有希望的轨迹,为精确的人类姿势分析提供了坚固的框架。该研究的发现通过为实时姿势估计提供可靠,有效的解决方案,从而有助于推动计算机视觉领域的进步。这些进步具有影响各种行业和领域的希望,暗示了实时姿势估计技术的重大进步。
rakshit poudel
摘要:本文介绍了一种用于健身运动形式检测的自动化系统,利用MediaPipe [1]进行实时姿势估计,而OpenCV [2]进行计算机视觉处理。该系统在练习中分析诸如下蹲,硬拉和二头肌卷曲等练习中的关键身体地标,从而立即提供了形式准确性的反馈。通过检测不正确的姿势,例如膝关节不当或背部曲率,该系统旨在降低受伤的风险并提高锻炼效率。所提出的方法旨在轻巧,易于访问且能够在消费级硬件上运行,从而使其可用于广泛使用。实验结果表明,检测常见形式错误的准确性很高,展示了该系统作为传统个人培训的一种具有成本效益的替代品的潜力。这项工作有助于自动健身监测的不断增长的领域,并突出了计算机愿景在改善运动安全性和性能中的作用。关键字:锻炼形式检测,媒体管,OpenCV,姿势估计,计算机视觉。