XiaoMi-AI文件搜索系统
World File Search SystemMobile

Telstra 移动计划
如果我出国了会怎样?如果您要转移现有服务,并且目前国际漫游已被阻止,这将继续适用于您的新计划,否则,国际漫游和国际一日通行证将默认在您的计划中激活。您可以通过拨打 125 109(在澳大利亚境内)或 +61 439 125 109(在澳大利亚境外)免费使用 Telstra 服务来停用它们。国际一日通行证允许您拨打和接听无限制的标准语音电话和短信,并包含在符合条件的漫游目的地旅行时每天使用的 500MB 数据(澳大利亚东部标准时间)。如果您使用的流量超过国际一日通行证的数据限额,我们将自动以 1GB 为单位添加额外的数据,每个 10 美元。如果您:
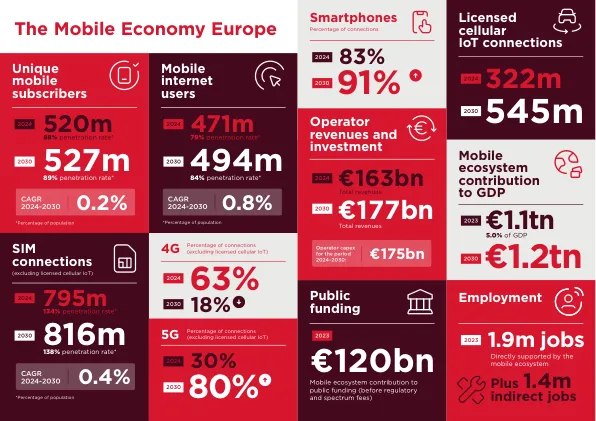


2024 年的移动经济
电信网络已将语音和数据连接推向当前水平(目前移动互联网用户超过 47 亿)。卫星和其他非地面网络 (NTN) 也提供了连接,但规模要小得多。然而,各种卫星和 NTN 解决方案的进步带来了性能改进、部署成本降低和更具商业可行性的商业模式,提高了更多参与连接领域的前景。在过去两年中,电信运营商和卫星公司之间的合作伙伴关系不断增加,预计 2024 年及以后将有更多交易达成。与此同时,随着技术突破使卫星能够连接到标准智能手机,直接到设备 (D2D) 解决方案和合作伙伴关系正在获得关注。

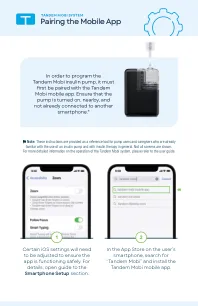
配对移动应用
重要的安全信息:仅RX。使用的指示:串联MOBI系统:带有可互动技术(泵)的串联MOBI胰岛素泵(泵)用于在需要胰岛素的人中的胰岛素和可变速率的皮下输送胰岛素,用于管理糖尿病。该泵能够可靠,安全地与兼容的,数字连接的设备(包括自动胰岛素给药软件)接收,执行和确认这些设备的命令。该泵旨在用于单一患者,家庭用途,需要处方。该泵指示用于6岁且更大的个体。Control-IQ技术:Control-IQ技术旨在与兼容的集成连续葡萄糖监测器(ICGM,单独出售)和启用备用控制器(ACE)泵一起使用,以自动增加,减少并暂停基于ICGM读数和预测的Glucose值的基础胰岛素。预计葡萄糖值超过预定义的阈值时,它也可以提供校正大量。Control-IQ技术旨在管理6岁及更高年龄的人的1型糖尿病。Control-IQ技术旨在单一患者使用。Control-IQ技术用于与Novolog或Humalog U-100胰岛素一起使用。

移动电力清洗
egle可以通过豁免或签发许可证从便携式电力清洗操作中授权将其放电,具体取决于放电的性质。如果没有地下水排放许可证(即授予许可证豁免)可以进行洗涤废水的排放,如果由家庭的乘员用于洗涤建筑物,车辆,车辆或其他与家庭占领相关的表面。将便携式电力洗涤水废水排放到地面上也不需要地下水排放许可证,以便在不使用添加剂时从车辆和表面上取出非冲洗物质。“添加剂”是指在水中添加的任何物质,以增强其在使用(但不限于清洁和消毒的肥皂,脱脂剂,脱脂剂,霉菌和藻类去除剂,漂白剂和酸)等用途的有效性。可生物降解的产品也被视为添加剂。商业操作员或在包含添加剂的商业或工业环境中使用的便携式垫圈的废水可以排放到
2022 年移动经济
GSMA 是一家全球性组织,致力于统一移动生态系统,发现、开发和提供创新,为积极的商业环境和社会变革奠定基础。我们的愿景是释放连接的全部力量,使人们、行业和社会蓬勃发展。GSMA 代表整个移动生态系统和相关行业的移动运营商和组织,通过三大支柱为其成员提供服务:良好的连接、行业服务和解决方案以及外展。这些活动包括推进政策、应对当今最大的社会挑战、支持使移动发挥作用的技术和互操作性,并在 MWC 和 M360 系列活动中提供世界上最大的平台来召集移动生态系统。