XiaoMi-AI文件搜索系统
World File Search SystemMotion



使用Leap Motion Controller
摘要。使用技术资源来开发医院环境中的关键任务,例如手术室,必须仔细完成,例如,在使用键盘或鼠标控制的设备时,避免通过触摸污染材料。从这个意义上讲,可以通过手势控制的设备作为克服此问题的适当方法。尽管有明显的好处,但这种类型的互动带来了一些挑战,例如需要适合执行任务的手势的词汇,此外,还有一种手势词汇,可以被环境中存在的传感器所识别。在这项工作中,我们描述了使用LEAP运动传感器来解决手势词汇识别任务的结果,旨在将其与Maring'a区域大学医院紧急和紧急部门使用的系统相结合。为此,我们定义了一个手势 - 示例和一组由指尖距离手掌中心的距离组成的特征。之后,我们创建了一个手势数据集,该数据集由10个不同的手势组成,共有20,000个样本。创建的数据库也将作为对这项工作的贡献。对于分类,我们评估了许多不同的分类。实验表明,可以使用拟议的策略来实现有希望的结果:通过优化贝叶斯搜索的超参数优化,并将模型与投票分类器相结合,我们实现了95.8个关键字的准确性:Leap Motion Sensor·手势识别·人体计算机界面·人体界面·信息系统。
HubSpot 和 Motion AI:支持聊天机器人的 CRM
HBS 高级讲师 Jill Avery 和教授 Thomas Steenburgh(弗吉尼亚大学)准备了此案例。经公司指定人员审核并批准后发布。此案例的开发资金由哈佛商学院提供,而非公司提供。Jill Avery 曾担任 HubSpot 的付费顾问。HBS 案例仅作为课堂讨论的基础而开发。案例并非旨在作为认可、原始数据来源或有效或无效管理的说明。版权所有 © 2018、2019 哈佛学院院长和研究员。如需订购副本或申请复制材料许可,请致电 1-800-545- 7685,写信至 Harvard Business School Publishing, Boston, MA 02163,或访问 www.hbsp.harvard.edu。未经哈佛商学院许可,不得将本出版物数字化、影印或以其他方式复制、发布或传播。
2023-2024 #227 - 重审动议(刺激)
该措施没有定义“限制”的含义,而该术语可能涵盖该倡议中的一系列不同主题,例如警察权力的运用:地方政府是否被禁止(1)在山火警戒日限制天然气或电力服务?(2)在建筑规范中设定能源效率要求?(3)要求遵守州温室气体排放目标?(4)要求检查供暖和制冷系统?“限制”还可能限制征税权:地方政府是否被禁止对某些产品或服务征收州税或地方税?

列奥纳多·达·芬奇:运动中的机器
机器——以及他的发明如何影响着我们今天 康涅狄格州哈特福德——2016 年 1 月 25 日——“列奥纳多·达芬奇:运动中的机器”将于 1 月 30 日在康涅狄格科学中心首次亮相新英格兰。列奥纳多·达芬奇是发明之父,他的遗产在这场令人兴奋的新展览中重现生机。达芬奇的手稿统称为“抄本”,包含当今许多现代技术的设计图。从旋转起重机到装甲车,《运动中的机器》中介绍的所有 40 台互动机器都是按全尺寸建造的,设计真实、可用的模型,所用材料都是 500 年前达芬奇时代的材料。这些精心打造的机器是由一群科学家和技艺精湛的工匠与意大利佛罗伦萨的列奥纳多·达芬奇博物馆合作建造的。该展览此前曾在雅典的希腊文化中心基金会和伊斯坦布尔的 Rahmi M. Koc 博物馆以及美国各地的多个地方展出。《列奥纳多达芬奇:机器在运动》由全球博物馆活动部设计和制作,目前在康涅狄格科学中心展出至 2017 年 1 月 8 日。康涅狄格科学中心总裁兼首席执行官 Matt Fleury 表示:“我们非常高兴能够向康涅狄格州及其他地区的游客展示这次展览。自达芬奇诞生以来,技术已经取得了长足的进步,但我们仍然可以在我们日常使用的许多设备和工具中看到他的作品。这次展览让我们深入了解了人类历史上最伟大的创新头脑之一,以及将带领我们走向未来的创造性思维的鼓舞人心的力量。”游客可以触摸这些发明并启动它们,让参与者沉浸在发明之父的独创性中。手摇曲柄和杠杆使机器栩栩如生,让孩子和大人都感到高兴。图形显示和视频探索了达芬奇的生平和遗产,介绍了他的创造力,并解释了这些超前的发明如何继续影响我们今天享受的许多现代技术。康涅狄格科学中心的“列奥纳多达芬奇:运动中的机器”的亮点包括:
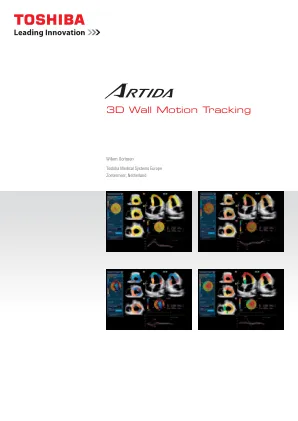
Artida 3D 墙壁运动追踪
可以执行 3D WMT 分析。要将 3D WMT 应用于数据集,用户必须提供一些参考点。在选定的 A 平面(通常是心尖四腔视图)中,用户必须为 WMT 固定三个参考点,两个位于二尖瓣水平的 LV 底部,一个位于心尖。B 平面使用相同的三个点,B 平面是与心尖四腔视图成 90° 正交的平面。通过这六个参考点,系统将自动检测心内膜边界。心外膜边界可以手动输入,也可以通过设置心肌的默认“厚度”来输入。在舒张末期参考框架处检测到心肌边界后,如果需要,用户可以在起始图像处校正 LV 参考的形状。当用户接受了舒张末期 LV 的形状时,可以开始 3D 壁运动跟踪过程。 20 秒内即可获得 3D WMT 的结果,并提供许多参数来解释心肌功能。
Huron 报告和董事会动议 06-16-23.pdf
亲爱的同事们,6 月 15 日和 16 日,肯塔基社区和技术学院系统 (KCTCS) 董事会 (BOR) 会议在多个层面上都取得了重大进展。在众多积极行动中,董事会投票通过了休伦项目的十二个优先事项,这些优先事项是校长领导团队 (PLT) 和 BOR 在 6 月 5 日和 6 日的联席会议上确定的。这十二个优先事项附在本通讯中,是 6 月 15 日和 16 日会议的董事会材料的一部分。该项目现在进入第二阶段“路线图”。路线图是概述实现每个优先事项的路径。虽然这是一种简单的表述方式,但路线图过程比设置线性过程并遵循它要复杂得多。相反,路线图将涉及绘制路径、走这条路所需的资源、走这条路所需的速度、各种优先路径的交集,以及用于衡量 KCTCS 在走这条路时所取得的成功的标准。所有这些都表明工作才刚刚开始。在肯塔基州旅行有其乐趣——风景和人民——但主要道路的修建需要几十年,维护则需要几十年。这是我提醒大家在修建道路和上路时不要失去耐心或忘记目的地的方式。该项目始于对透明度的承诺,董事会和管理层致力于就调查结果和机会进行公开交流。休伦资源优化研究可以在系统总裁办公室 SharePoint 站点的“最终报告和董事会动议”文件夹中找到。另请注意,这不包括人力资源分析或薪酬和公平研究的数据或数据分析。这些是项目的独立部分,有不同的时间表。该项目这些部分的机会将分别在 8 月和 9 月才能最终确定。再提醒一句,成本节约和投资回报不一定关注人员或他们的工作。路线图中的某些项目与我们流程的有效性以及资源的最佳利用有关,从我们的建筑到我们与当地企业的社区伙伴关系,再到我们敬业的员工。最重要的是,这些优先事项及其路线图对于驾驭我们不断变化的教育和劳动力格局以及确保我们实现使命和践行我们的价值观至关重要。诚挚的,帕梅拉·M·邓肯 总法律顾问 肯塔基社区和技术学院系统

2019 年 7 月电子运动与转换
英飞凌科技公司与赛普拉斯半导体公司宣布,两家公司已签署最终协议,英飞凌将以每股 23.85 美元现金收购赛普拉斯,企业价值为 90 亿欧元。 英飞凌首席执行官 Reinhard Ploss 表示:“计划收购赛普拉斯是英飞凌战略发展的重要一步。我们将加强和加速我们的盈利性增长,并将我们的业务推向更广阔的基础。通过此次交易,我们将能够为客户提供连接现实世界和数字世界的最全面产品组合。这将在汽车、工业和物联网领域开辟额外的增长潜力。此次交易还使我们的商业模式更具弹性。” 赛普拉斯总裁兼首席执行官 Hassane El-Khoury 表示:“赛普拉斯团队很高兴能与英飞凌联手,利用下一波技术浪潮中连接性和计算需求大幅增长所带来的数十亿美元机遇。这一声明不仅证明了我们团队的实力