XiaoMi-AI文件搜索系统
World File Search SystemNMD

地图与神话 - ASPRS
摘要 无论是发达国家还是发展中国家,许多地区都缺乏有效支持环境规划、资源管理和公共政策决策所需的空间精确数据。地图数据缺乏的原因是多种多样的。制图既不容易,也不便宜。这涉及到国家安全和国家主权问题。我们需要重振和扩大我们的制图计划,使其以国家为中心,但范围却全球。让一个民间机构在全球制图方面发挥主导作用也是必不可少的。我们需要努力打破阻碍地图信息公开流动的障碍,筹集所需资源填补空白,并支持增加对制图和空间分析研究的资助。如果我们要加深对这个迅速变化的世界的理解,就必须这样做。引言 需要空间精确的全球数据来解决的问题不胜枚举。生物多样性、人口统计、森林砍伐、沙漠化、淡水和贫困都很重要(Htun,1993)。生态系统健康、人类健康、空气质量以及美国全球变化研究计划(USGCRP,1993)所涉及的所有主要问题也很重要。目前阻碍这些问题研究和应用导向研究的一个主要因素是,世界上许多地区都没有足够的地图。根据规模、主题内容和时效性,发达国家和发展中国家的情况都一样。许多人觉得这很难相信。我们常常认为我们需要的地图是存在的,包含我们寻找的信息,是准确的,也是最新的。然而,我们必须提醒自己,信息在收集时就已经过时了,而根据这些信息绘制的地图对于某些类型的研究来说,其用处可能有限。有些地图信息比其他信息更容易过时,例如大陆轮廓与森林砍伐相反。数据的价值很多时候与其流通性有关。制图是一项重要、复杂、昂贵且耗时的任务,我们认为,我们目前没有以可接受的方式进行。本文中使用的“地图”一词指数字和纸质(模拟)产品。“地图”不仅指标准化的基础制图产品,例如美国地质调查局(uscs)、国家测绘部(NMD)、1:24,000 比例尺、7.5 分钟的地形图,这些地图已按照精确的规格编制,也适用于通常称为“地图”的东西,例如图表、草图和/或计划。术语“科学质量”用于
地图与神话 - ASPRS
摘要 无论是发达国家还是发展中国家,许多地区都缺乏有效支持环境规划、资源管理和公共政策决策所需的空间精确数据。地图数据缺乏的原因有很多。制图既不容易,也不便宜。这涉及国家安全和国家主权问题。我们需要重振和扩大我们的制图计划,使其以国家为重点,但范围却覆盖全球。让民间机构在全球制图方面发挥主导作用也至关重要。我们需要努力打破阻碍地图信息开放流动的障碍,筹集所需资源来填补空白,并支持增加制图和空间分析研究资金的努力。如果我们想要更好地理解这个快速变化的世界,就必须这样做。简介 需要空间精确的全球数据的问题不胜枚举。生物多样性、人口统计、森林砍伐、沙漠化、淡水和贫困都很重要(Htun,1993 年)。生态系统健康、人类健康、空气质量以及美国涉及的所有主要问题也很重要。全球变化研究计划(USGCRP,1993 年)。当今阻碍这些问题研究和应用导向研究的一个主要因素是,世界上许多地区没有足够的地图。根据规模、主题内容和时效性,发达国家和发展中国家的情况都一样。很多人觉得这很难相信。我们常常认为我们需要的地图是存在的,包含我们寻求的信息,是准确的,并且是最新的。但是,我们必须提醒自己,信息在收集时就已经过时了,而根据这些信息绘制的地图对于某些类型的研究来说,其实用性有限。有些地图信息比其他信息更容易过期,例如大陆轮廓与森林砍伐。数据的价值很多时候与其时效性有关。制图是一项重要、复杂、昂贵且耗时的任务,我们认为,我们目前没有以可接受的方式执行这项任务。本文中使用的“地图”一词指数字和纸质(模拟)产品。“科学质量”一词用于“地图”不仅仅指标准化的基础制图产品,例如美国地质调查局 (uscs)、国家测绘部 (NMD)、按照精确规格编制的 1:24,000 比例、7.5 分钟地形图,还适用于通常称为“地图”的产品,例如图表、草图和/或平面图。

海事系统设计与验证的形式化方法...
摘要 海上自主水面舰艇 (MASS) 正在接近现实,为海上控制系统带来了新的复杂性和关键性。在本文中,我们研究了如何使用形式化方法 (FM) 来设计和验证海上控制系统,以实现安全有效的 MASS。FM 是一系列基于数学的规范和验证方法。我们首先对 FM 进行高级介绍。我们讨论了当前的海上控制系统认证实践和走向自主化的需求。我们给出了三个具体示例,说明如何应用 FM 来满足这些需求:COLREG 的形式化规范、基于合同的设计和基于模拟的测试的自动化。最后,讨论了 FM 的一些局限性。我们得出结论,FM 似乎是满足部分自主性需求的有希望的候选者,并鼓励对 MASS 的 FM 进行进一步研究。关键词 海上自主水面舰艇、形式化方法、验证、规范、保证 简介 海上自主水面舰艇 (MASS) 正在接近现实,正在进行的项目众多,从小型研究原型到全尺寸工业船舶。虽然存在几种程度的自主性,但 MASS 的典型特点是能够在非平凡操作中独立于人类操作员运行,需要态势感知和规划能力。这些特点使得 MASS 开发人员需要新的设计方法,监管机构 (IMO 2021、NMD 2020) 和船级社 (DNV 2018) 也需要新的安全保证方法和流程。形式化方法 (FM) 是一类基于数学的规范和验证方法,源自理论计算机科学 (Woodcock 等人2009)。FM 提供高水平的保证,因此几十年来一直被积极用于其他行业(如航空航天和铁路)关键系统的开发和验证。随着自主系统的出现,FM 被认为是解决它们带来的一些保证挑战的有希望的候选者。这导致了过去十年来对应用于自动驾驶汽车和飞行器的 FM 的积极研究(Luckcuck 等人2019)。海运业尚未看到 FM 的广泛采用。然而,这种情况似乎正在改变,因为去年发表了一些文章。Shokri-Manninen 等人。福斯特等人。(2020) 创建了一个基于自动机的单船相遇正式模型,并综合了一种构造正确的导航策略。Park 和 Kim (2020) 基于可达性分析,综合了一种构造正确的船舶自动停靠控制器。(2020) 提出了一种混合动力系统形式的自主船舶控制器,并使用自动定理证明器来验证一些安全不变量。本文旨在通过首先进行高级介绍,引起海事界对 FM 的关注。接下来,我们回顾当前海事控制系统设计和验证的实践,并讨论一些走向自主化的需求。然后,我们在三个特定用例中激励并演示了 FM 的使用,以满足这些需求。最后,我们讨论一下 FM 的一些局限性。
电气工程
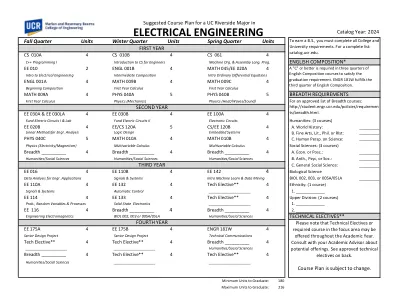
(1) 通信、信号处理和网络(CSPN) (4) 智能系统(IS) EE 115 - 必修* 通信简介 (4) EE 144 - 必修* 机器人技术简介 (4) EE 141 - 必修* 数字信号处理 (4) EE 146 - 必修* 计算机视觉 (4) EE 100B 电子电路 II (4) EE 105 动态系统建模与仿真 (4) EE 117 电磁学 II (4) EE 106 实用机器人编程 (4) EE 118 射频电路设计 (4) EE 115 通信简介 (4) EE 146 计算机视觉 (4) EE 128 嵌入式系统的传感与驱动(4) EE 150 数字通信 (4) EE 141 数字信号处理 (4) EE 152 图像处理 (4) EE/ME 145 机器人规划与运动学 (4) ENGR 160 工程优化技术简介 (4) EE 147 GPU 计算与编程 (4) EE 150 数字通信 (4) (2) 控制与机器人 (CR) EE 151 数字控制简介 (4) EE 105 - 必修* 动态系统建模与仿真 (4) EE 152 图像处理 (4) EE 144 - 必修* 机器人简介 (4) ENGR 160 工程优化技术简介 (4) EE 106 编程实用机器人 (4) (5) 纳米技术、先进材料与设备 (NMD) EE 141 数字信号处理 (4) EE 136 - 必修* 半导体器件处理 (4) EE/ME 145 机器人规划与运动学 (4) EE 137 - 必修* 半导体光电器件简介 (4) EE 146 计算机视觉 (4) EE 100B 电子电路 II (4) EE 151 数字控制简介 (4) EE 117 电磁学 II (4) EE 152 图像处理 (4) EE 118 射频电路设计 (4) ENGR 160 工程优化技术简介 (4) EE 135 模拟集成电路布局与设计 (4) EE 138 材料的电子特性 (4) (3) 嵌入式系统和 VLSI EE 139 磁性材料 (4) EE 128 - 必修* 嵌入式系统的传感与驱动(4) EE 162 纳米电子学概论 (4) EE/CS 168 - 必修* VLSI 设计简介 (4) EE/CS 168 VLSI 设计简介 (4) EE 100B 电子电路 II (4) (6) 电力系统与智能电网(PSSM) EE 117 电磁学 II (4) EE 123 - 必修* 电力电子学 (4) EE 118 射频电路设计 (4) EE 155 - 主修课程* 电力系统分析 (4) EE 135 模拟集成电路布局与设计 (4) EE 100B 电子电路 II (4) EE 147 GPU 计算与编程 (4) EE 117 电磁学 II (4) EE 165 集成电路与系统的可靠性设计 (4) EE 128 嵌入式系统的传感与驱动(4)CS 161 计算机系统设计与架构(4)EE 153 电力驱动(4)CS 162 计算机架构(4)ENGR 160 工程优化技术简介(4)
罗扎诺利珠单抗治疗全身性重症肌无力患者的长期安全性结果:汇总分析
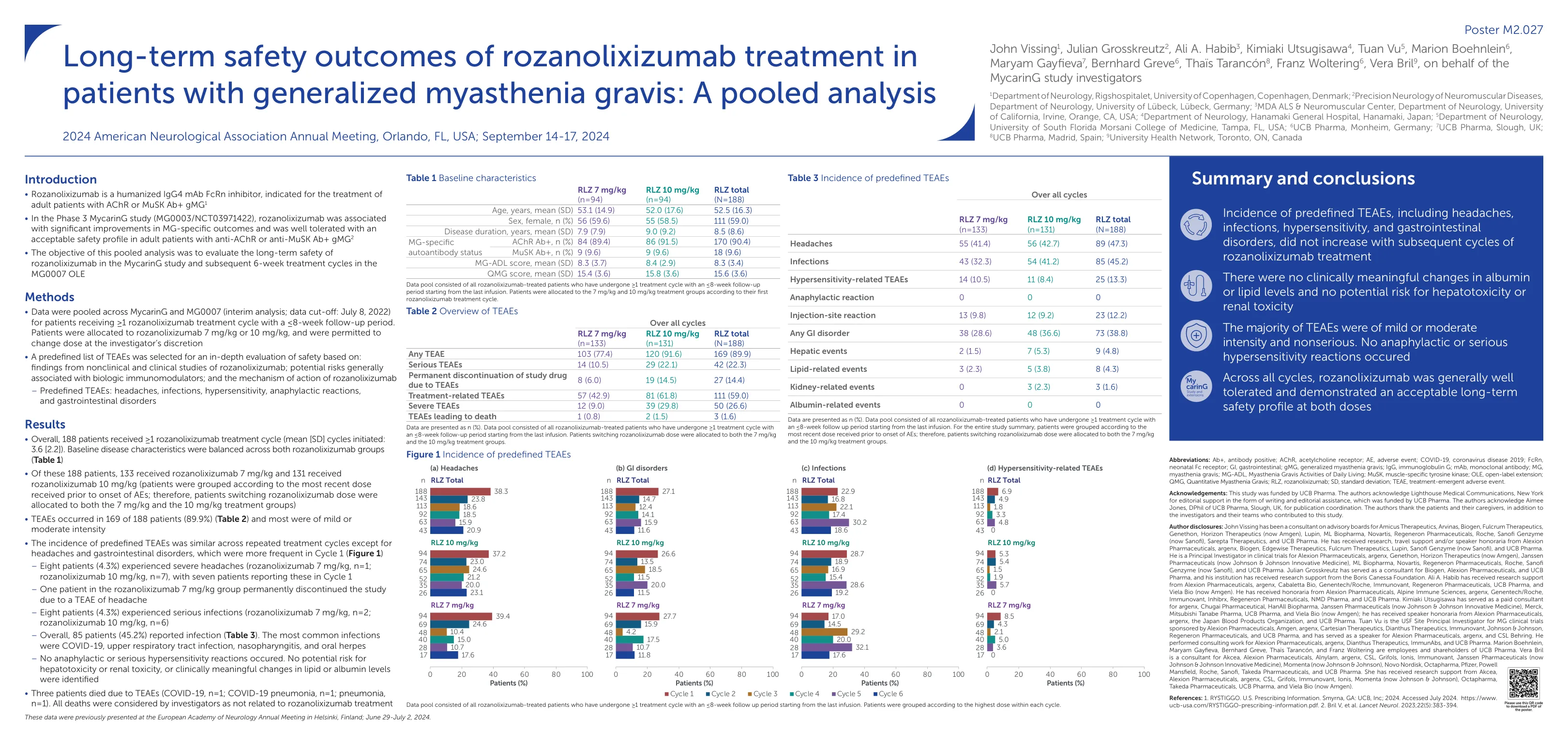
作者披露:John Vissing 曾担任 Amicus Therapeutics、Arvinas、Biogen、Fulcrum Therapeutics、Genethon、Horizon Therapeutics(现为 Amgen)、Lupin、ML Biopharma、Novartis、Regeneron Pharmaceuticals、Roche、Sanofi Genzyme(现为 Sanofi)、Sarepta Therapeutics 和 UCB Pharma 顾问委员会的顾问。他曾获得 Alexion Pharmaceuticals、argenx、Biogen、Edgewise Therapeutics、Fulcrum Therapeutics、Lupin、Sanofi Genzyme(现为 Sanofi)和 UCB Pharma 的研究、差旅支持和/或演讲者酬金。他是 Alexion Pharmaceuticals、argenx、Genethon、Horizon Therapeutics(现为 Amgen)、Janssen Pharmaceuticals(现为 Johnson & Johnson Innovative Medicine)、ML Biopharma、Novartis、Regeneron Pharmaceuticals、Roche、Sanofi Genzyme(现为 Sanofi)和 UCB Pharma 临床试验的首席研究员。Julian Grosskreutz 曾担任 Biogen、Alexion Pharmaceuticals 和 UCB Pharma 的顾问,他的机构获得了 Boris Canessa 基金会的研究支持。Ali A. Habib 曾获得 Alexion Pharmaceuticals、argenx、Cabaletta Bio、Genentech/Roche、Immunovant、Regeneron Pharmaceuticals、UCB Pharma 和 Viela Bio(现为 Amgen)的研究支持。他曾获得 Alexion Pharmaceuticals、Alpine Immune Sciences、argenx、Genentech/Roche、Immunovant、Inhibrx、Regeneron Pharmaceuticals、NMD Pharma 和 UCB Pharma 的酬金。Kimiaki Utsugisawa 曾担任 argenx、Chugai Pharmaceutical、HanAll Biopharma、Janssen Pharmaceuticals(现为 Johnson & Johnson Innovative Medicine)、Merck、Mitsubishi Tanabe Pharma、UCB Pharma 和 Viela Bio(现为 Amgen)的付费顾问;他还曾获得 Alexion Pharmaceuticals、argenx、日本血液制品组织和 UCB Pharma 的演讲酬金。 Tuan Vu 是 MG 临床试验的 USF 首席研究员,该临床试验由 Alexion Pharmaceuticals、Amgen、argenx、Cartesian Therapeutics、Dianthus Therapeutics、Immunovant、Johnson & Johnson、Regeneron Pharmaceuticals 和 UCB Pharma 赞助,并曾担任 Alexion Pharmaceuticals、argenx 和 CSL Behring 的发言人。他为 Alexion Pharmaceuticals、argenx、Dianthus Therapeutics、ImmunAbs 和 UCB Pharma 提供咨询服务。Marion Boehnlein、Maryam Gayfieva、Bernhard Greve、Thaïs Tarancón 和 Franz Woltering 是 UCB Pharma 的员工和股东。 Vera Bril 是 Akcea、Alexion Pharmaceuticals、Alnylam、argenx、CSL、Grifols、Ionis、Immunovant、Janssen Pharmaceuticals(现为 Johnson & Johnson Innovative Medicine)、Momenta(现为 Johnson & Johnson)、Novo Nordisk、Octapharma、Pfizer、Powell Mansfield、Roche、Sanofi、Takeda Pharmaceuticals 和 UCB Pharma 的顾问。她曾获得 Akcea、Alexion Pharmaceuticals、argenx、CSL、Grifols、Ionis、Momenta(现为 Johnson & Johnson)、Octapharma、Takeda Pharmaceuticals、UCB Pharma 和 Viela Bio(现为 Amgen)的研究支持。
电气工程
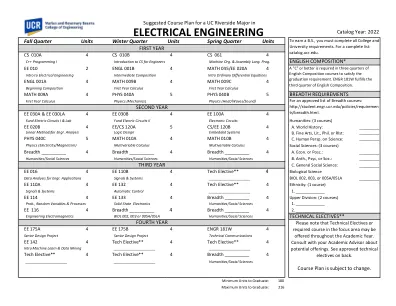
(1) 通信、信号处理和网络(CSPN) (4) 智能系统(IS) EE 115 - 必修* 通信简介 (4) EE 144 - 必修* 机器人技术简介 (4) EE 141 - 必修* 数字信号处理 (4) EE 146 - 必修* 计算机视觉 (4) EE 100B 电子电路 II (4) EE 105 动态系统建模与仿真 (4) EE 117 电磁学 II (4) EE 106 实用机器人编程 (4) EE 118 射频电路设计 (4) EE 115 通信简介 (4) EE 146 计算机视觉 (4) EE 128 嵌入式系统的传感与驱动(4) EE 150 数字通信 (4) EE 141 数字信号处理 (4) EE 152 图像处理 (4) EE/ME 145 机器人规划与运动学 (4) ENGR 160 工程优化技术简介 (4) EE 147 GPU 计算与编程 (4) EE 150 数字通信 (4) (2) 控制与机器人 (CR) EE 151 数字控制简介 (4) EE 105 - 必修* 动态系统建模与仿真 (4) EE 152 图像处理 (4) EE 144 - 必修* 机器人简介 (4) ENGR 160 工程优化技术简介 (4) EE 106 编程实用机器人 (4) (5) 纳米技术、先进材料与设备 (NMD) EE 141 数字信号处理 (4) EE 136 - 必修* 半导体器件处理 (4) EE/ME 145 机器人规划与运动学 (4) EE 137 - 必修* 半导体光电器件简介 (4) EE 146 计算机视觉 (4) EE 100B 电子电路 II (4) EE 151 数字控制简介 (4) EE 117 电磁学 II (4) EE 152 图像处理 (4) EE 118 射频电路设计 (4) ENGR 160 工程优化技术简介 (4) EE 135 模拟集成电路布局与设计 (4) EE 138 材料的电子特性 (4) (3) 嵌入式系统和 VLSI EE 139 磁性材料 (4) EE 128 - 必修* 嵌入式系统的传感与驱动(4) EE 162 纳米电子学概论 (4) EE/CS 168 - 必修* VLSI 设计简介 (4) EE/CS 168 VLSI 设计简介 (4) EE 100B 电子电路 II (4) (6) 电力系统与智能电网(PSSM) EE 117 电磁学 II (4) EE 123 - 必修* 电力电子学 (4) EE 118 射频电路设计 (4) EE 155 - 主修课程* 电力系统分析 (4) EE 135 模拟集成电路布局与设计 (4) EE 100B 电子电路 II (4) EE 147 GPU 计算与编程 (4) EE 117 电磁学 II (4) EE 165 集成电路与系统的可靠性设计 (4) EE 128 嵌入式系统的传感与驱动(4)CS 161 计算机系统设计与架构(4)EE 153 电力驱动(4)CS 162 计算机架构(4)ENGR 160 工程优化技术简介(4)
电气工程
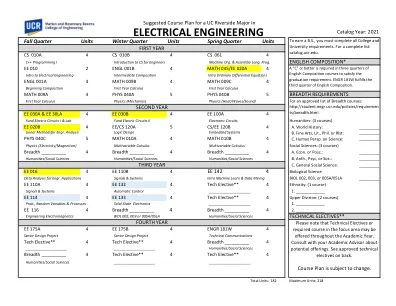
(1)通信,信号处理和网络(CSPN)(4)智能系统(IS)EE 115-必需*通信(4)EE 144-必需*机器人的简介(4)EE 141-必需*数字信号处理*数字信号处理* 117电磁学II(4)EE 106编程实用机器人(4)EE 118射频电路设计(4)EE 115通信介绍(4)EE 146计算机视觉(4)EE 128 EE 128嵌入的感应和驱动。sys。sys。(4)EE 162纳米电子学入门(4)EE/CS 168-必需* VLSI设计简介(4)EE/CS 168 VLSI设计简介(4)EE 100B电子电路II(4)EE 117 EE 117 EE 117 EE EE 117电子电磁频率II(4)电气频率(6)频率EE(4)频率EE EE(4)EE EE(4)EE(4)EE EE(4)EE EE EE(4)EE EE(4) Required* Power Electronics (4) EE 135 Analog Integrated Circuit Layout and Design (4) EE 155 - Lead Course* Power System Analysis (4) EE 141 Digital Signal Procesing (4) EE 100B Electronic Circuits II (4) EE 147 GPU Computing and Programming (4) EE 117 Electromagnetics II (4) EE 165 Design for Reliability of Integrated Circuits and Sys.(4)EE 128嵌入的感应和致动。sys。(4)CS 161计算机系统的设计和体系结构(4)EE 153电动驱动器(4)(4) EE 150 Digital Communications (4) EE 141 Digital Signal Procesing (4) EE 152 Image Processing (4) EE/ME 145 Robotic Planning & Kinematics (4) ENGR 160 Intro to Engineering Optimization Techniques (4) EE 147 GPU Computing and Programming (4) EE 150 Digital Communications (4) EE 151 Introduction to Digital Control (4) (2) Control and Robotics (CR)EE 152图像处理(4)EE 105-必需*动态系统的建模和模拟工程学优化技术(4)EE 144-必需*机器人介绍(4)EE 106编程实用机器人(4)(4)(5)Nanotechnology,先进的材料,和设备EE EE EE EE EE EE EE(4)半导体设备处理(4)EE/ME 145机器人计划和运动学(4)EE 137-必需*半导体光电设备的介绍(4)EE 146 EE 146计算机视觉(4)EE 100B电子电路II(4)EE II(4)EE 151数字控制(4)EE 117 Electermage Electii ii(4)EE EE 117 EELOMAGETIC EE EE(4)EE EE EE EE(4)EE EE(4)EE(4)EE(4)EE(4)EE(4)EE EE(4)EE EE(4)电路设计(4)ENGR 160工程优化技术的简介(4)EE 135模拟集成电路布局和设计(4)EE 138材料的电子性能(4)(3)嵌入式系统和VLSI EE 139磁性材料(4)EE 128-所需的*传感和嵌入的操作。

情节扭曲:当RNA证据挑战我们对DNA结果的期望时,Alexandra Richardson,MS; Terra Brannan,博士; Colin Young博士; Marcy Richa
情节扭曲:当RNA证据挑战我们对DNA结果的期望时,Alexandra Richardson,MS; Terra Brannan,博士; Colin Young博士; Marcy Richardson博士; Carrie Horton,MS-CGC; Heather Zimmermann,博士背景:配对的DNA和RNA测试(DGT-RGT)通过检测位于标准的下一代序列(NGS)捕获以外的剪接变体和提供变体分类中的证据范围来提高DNA结果的准确性。DGT-RGT的另一个好处是识别导致意外或非常规剪接事件的变体。在这里,我们提出了一个变异级别的病例系列,该病例序列突出了通过DGT-RGT在一个临床诊断实验室中鉴定出的意外RNA发现。变体呈现:变体1-NF1 C.888+2T> C会影响剪接供体部位内的规范位置,从而根据当前ACMG指南将其分类为病原(LP)。最近的研究表明,+2位置的T> c取代能够在某些基因组环境中产生野生型转录本。DGT-RGT并未确定与该变体相关的明显异常剪接,这与载体中缺乏神经纤维瘤病一致。变体2- BRIP1 c.727a> g(p.i243v)是中期错义变化,在硅剪接站点中,该算法预测了创建强大的de从头供体站点。RNA研究证实了这种新型供体部位的使用,但出乎意料地表明,外显子内的现有隐性受体位点同时被激活,从而有效地在外显子内产生了伪内龙。在计算机剪接算法中预测了新型U2受体位点的创建。变体3&4 NF1 C.5750-184_5750-178 duptttcttc和atm c.3480g> t(p.v1160v)分别是内含子和同义中的中性和同义性中性变化。RNA测试确定了使用远处的隐性受体部位引起的异常转录本。这两个变体都会增加神秘受体上游隐秘的多吡啶氨酸段中的嘧啶含量。多嘧啶界是受体剪接位点识别中的重要组成部分,但据我们所知,尚未据报道隐性多吡啶氨酸裂纹激活作为异常剪接的机制。变体5&6 -BRCA2 [C.6816_6841+1534DEL1560; c.6762delt]和APC c.1042c> t(p.R3248*)预计由于过早终止密码子(PTC)而导致无义介导的衰减(NMD),因此根据ACMG指南将其归类为致病性。然而,RNA测试表明,这些变体引起了框架内的剪接事件,从而去除了PTC,这一发现与载体中相关的基因 - 疾病表型不存在一致。变体7- lztr1 c.2232g> a(p.a744a)是一种高频同义词,位于内含子的下游,它通过毫无常见的U12剪接体剪接。RNA测试表明,新型U2受体位点经常与现有的上游,隐秘的U2供体站点一起使用,但仅在某些个体中。其他具有低级异常剪接的概率对于弱化隐秘的U2供体部位的常见多态性是纯合的。结论:据我们所知,这是影响内含子的U2/U12-身份的单个核苷酸变化的第一个例子,它也例证了转录组中的个体变异性。
分子生物学(3cfu)综合课程
超螺旋和拓扑性质。拓扑异构酶。细菌类核。组蛋白和核小体的性质和组装。染色质的高级结构。组蛋白的翻译后修饰。溴多胺和染色质结构域。表观遗传学。原核生物和真核生物的基因组。复制模型。DNA合成。细菌DNA聚合酶。校对和缺口翻译。复制子模型。OriC和半甲基化。Ter/Tus。真核细胞核中的复制工厂。ARS结构和复制控制。酶学。前RC和前启动复合物。复制抑制剂,如化疗药物和抗病毒药物。端粒和端粒酶的结构、功能和意义。DNA损伤和修复。基因组作为动态实体。体细胞和种系突变。SNP。内在和外在损伤。化学和物理诱变剂。原核生物和真核生物中的去除、逆转和损伤避免系统。MUT 系统。BER 系统。糖基化酶的重要性。安全系统。NER 系统:UvrABCD 和 XP 蛋白。GG-NER 和 TC-NER。光解作用、MGMT、AlkBH。损伤耐受机制。TLS。细菌中的 SOS 反应。单丝和双丝断裂。HR 和 NHEJ。由于修复系统突变而导致的人类疾病。位点特异性重组。重组酶。Lambda 噬菌体。Cre-Lox 系统和 KO 小鼠。简单和复杂的转座子。SINE 和 LINE 元素、Alu 序列。原核生物和真核生物中的 RNA。结构、类型和特性。细菌 RNA 聚合酶和相关因子。转录单位。转录步骤。细菌启动子中的共识序列。终止机制。抑制剂。 Lac、ara 和 trp 操纵子。阳性和阴性对照。真核细胞中的 RNA 类别。RNA 聚合酶 (CTD) 的结构和功能。三种启动子的特征。基础转录机制。TFIIH。反式激活因子、辅激活因子。CpG 岛甲基化。组蛋白密码。长程调节剂。DNA 结合蛋白的功能域 (HTH、HD、HLH、ZF、LZ)。RNA 成熟、核运输和转录后控制。加帽类型。添加 polyA。CTD 的变化。外显子和内含子。外显子改组。四类内含子及其去除机制。剪接体和剪接位点。AT-AC 剪接。EJC 复合体。可变剪接。ESE 和 ESS 序列、SR 和 hnRNP 蛋白。SMN 基因。剪接和病理。rRNA 和 tRNA 加工反应。核糖体基因。 SnoRNA 和核仁功能。RNA 编辑。插入和转换编辑。人类 RNA 编辑的示例。细胞核和细胞质中的 RNA 周转。外泌体。无义介导的 mRNA 衰变 (NMD)。非编码 RNA。小 RNA 在细胞中的功能。RNA 干扰。siRNA。微小 RNA 的生物发生。miRNA、长链非编码 RNA、环状 RNA 的作用机制。逆转录病毒的一般信息。遗传密码和翻译。遗传密码的性质和特征。线粒体密码。ORF。tRNA 的特征。不常见碱基。aa-tRNA 合成酶的功能和类别。遗传密码的翻译重编码和扩展。SeCys。核糖体是一种核酶。原核生物和真核生物的翻译阶段。不同的启动机制。能量成本。NSMD。细菌中的 tmRNA。抑制剂。蛋白质的翻译后修饰、分选和降解。折叠和错误折叠。朊病毒。HSP60 和 HSP70。泛素和泛素化系统。SUMO 化糖基化。蛋白酶体。肽信号。蛋白质分选。线粒体输入。线粒体基因组细胞中的线粒体可塑性。人类线粒体基因组。遗传、结构、复制及其表达的原理。线粒体 DNA 中的改变。DNA 克隆的原理。修饰限制系统。克隆载体。cDNA 合成。基因组 DNA 和 cDNA 文库。TA 克隆。表达克隆。基因表达沉默。基因治疗。数据库。基因组编辑元件(Talen、Zn 指、CRISPR/Cas9 系统)。PCR 和 DNA 测序。PCR 的特性。PCR-RFLP。实时 PCR、DNA 测序。NGS。核酸杂交。杂交原理。熔点和严格性。探针制备:切口平移。Southern、Northern、杂交测定。蛋白质印迹。

玩具车垫 3D 全印花运动服
“美国城市、城镇、社区、州、县、大都市区、邮政编码、区号和学校的本地指南。” 76 次观看45 次观看49 次观看39 次观看41 次观看36 次观看36 次观看37 次观看33 次观看37 次观看35 次观看35 次观看36 次观看40 次观看34 次观看45 次观看36 次观看39 次观看27 次观看35 次观看25 次观看37 次观看35 次观看32 次观看26 次观看29 次观看41 次观看24 次观看43 次观看25 次观看35 次观看30 次观看39 次观看27 次观看27 次观看30 次观看27 次观看22 次观看31 次观看30 次观看24 次观看26 次观看26 次观看31 次观看31 次观看29 次观看22 次观看40 次观看26 次观看24 次观看30 次观看40 次观看25 次观看26 次观看25 次观看19 次观看93 次观看80 次观看69 次观看84 次观看61 次观看63 次观看70 次观看83 次观看91 次观看105 次观看52 次观看57 次观看89 次观看67 次观看74 次观看88 次观看71 次观看55 次观看82 次观看52 次观看80 次观看73 次观看49 次观看69 次观看51浏览次数56 浏览次数56 浏览次数55 浏览次数60 浏览次数41 浏览次数65 浏览次数50 浏览次数65 浏览次数50 浏览次数41 浏览次数43 浏览次数52 浏览次数45 浏览次数55 浏览次数49 浏览次数43 浏览次数52 浏览次数62 浏览次数49 浏览次数44 浏览次数 从 0 天 0 小时 00 分钟 00 秒 分享此优惠 送货需要至少 7 个工作日才能发货 购买的物品可以从我们的办公室领取或送货 物品必须在 2021 年 6 月 27 日之前领取/收到 未在 2021 年 6 月 27 日之前领取/收到的物品将被没收,不予退款 您的产品可立即领取 - 详情请参阅下文 无现金价值/无现金返还/不退款 立即检查产品;自收到产品之日起 7 天内有缺陷退货,前提是退回的物品未使用且