XiaoMi-AI文件搜索系统
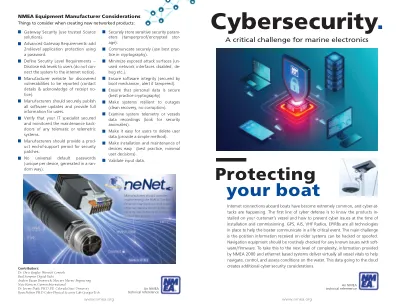
World File Search SystemNMEA
Power™的智能选择
Xplore 120/12电池充电器是当今市场上最大,最强大的充电器。通用自动范围的交流输入和120安培的输出电流可确保超快速且可靠的全球充电。最多有六个同时充电的输出库加上可以用不同化学物质为两个电池库充电的能力,Xplore 120/12消除了需要单独的单个化学充电器,并最大程度地减少房屋库和发动机库的安装和接线成本。它还配备了易于阅读的前面板LED显示屏,以用于基本配置和状态信息。使用Xantrex BLE模块,NMEA 2000协议或Xantrex应用程序启用了高级监视和配置。
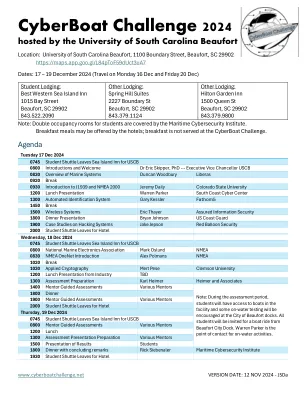
网络船挑战2024
0745 Student Shuttle Leaves Sea Island Inn for USCB 0800 Introductions and Welcome Dr Eric Skipper, PhD --- Executive Vice Chancellor USCB 0830 Overview of Marine Systems Duncan Woodbury Liberas 0920 Break 0930 Introduction to J1939 and NMEA 2000 Jeremy Daily Colorado State University 1200 Lunch Presentation Warren Parker South Coast Cyber Center 1300 Automated Identification System Gary Kessler Fathom5 1450 Break 1500无线系统Eric Thayer保证信息安全1800晚餐演示文稿Bryan Johnson美国海岸警卫队1900有关黑客系统的案例研究Jake Jepson Red气球安全2000年学生班车2000年学生班车离开酒店2024年12月18日,星期三

扩展卡尔曼滤波器设计及船舶运动预测...
摘要 — 本文使用来自自动识别系统 (AIS) 的实时数据和扩展卡尔曼滤波器 (EKF) 设计来解决船舶运动估计问题。AIS 数据从全球船舶传输,甚高频 (VHF) AIS 接收器以美国国家海洋电子协会 (NMEA) 指定的格式接收信号作为编码的 ASCII 字符。因此,必须使用解析器解码 AIS 语句以获得实时船舶位置、航向和速度测量值。状态估计用于碰撞检测和实时可视化,这是现代决策支持系统的重要特征。使用来自挪威特隆赫姆港的实时 AIS 数据验证了 EKF,并证明估计器可以实时跟踪船舶。还证明了 EKF 可以预测船舶的未来运动,并在防撞场景中分析了不同的规避动作。索引术语 — 卡尔曼滤波器、状态估计、运动预测、碰撞检测、无人水面航行器、船舶
使用实时自动识别系统 (AIS) 数据进行扩展卡尔曼滤波器设计和船舶运动预测
摘要 — 本文使用来自自动识别系统 (AIS) 的实时数据和扩展卡尔曼滤波器 (EKF) 设计来解决船舶运动估计问题。AIS 数据由全球船舶传输,甚高频 (VHF) AIS 接收器以美国国家海洋电子协会 (NMEA) 指定的格式接收编码的 ASCII 字符信号。因此,必须使用解析器解码 AIS 语句以获取实时船舶位置、航向和速度测量值。状态估计用于碰撞检测和实时可视化,这是现代决策支持系统的重要功能。使用来自挪威特隆赫姆港的实时 AIS 数据验证了 EKF,并证明了估计器可以实时跟踪船舶。还证明了 EKF 可以预测船舶的未来运动,并在防撞场景中分析了不同的规避动作。索引词——卡尔曼滤波器、状态估计、运动预测、碰撞检测、无人水面舰艇、船舶

海洋扫盲研究社区:共同识别差距和优先事项以促进联合国海洋十年
源自2000年代初的美国,其最初的基础是正规教育和海洋科学知识,其最简单形式的海洋素养可以定义为“对您对海洋的影响有了“了解您对海洋的影响,而海洋对您的影响”(国家海洋教育工作者协会(NMEA),2023年)。最初是基于七个基本原则(Cava等,2005;国家海洋和大气管理局(NOAA),2013年),海洋素养倡议经常着重于发展公共知识和对海洋的认识,许多学者探索了许多学者,主要通过上学和教师的镜头教育,在过去的两个十年中,参见了钢铁的范围。 ; Mogias等人,2019年;人们对扩大这一点的兴趣充满了兴趣,以更好地说明海洋素养和海洋扫盲研究(OLR)的许多方式,以帮助使社会与海洋联系和依赖的方式的多样性提升。越来越多地被认为是一种最终决定我们共同活力的互惠和循环关系,这需要对基于位置的环境中的海洋影响的多种经验和价值进行更彻底的研究

手册和绘制乘以Multiplus-II 15KVA 3偶然MPPT 250 ...
cerbo gx带有GX Touch-70显示屏和GX LTE 4G:带有GX Touch 70显示器和4G通信设备GX LTE 4G的Cerbo GX在lynx发行器上方都可见。CERBO与GX Touch 70显示屏一起是安装的监视心脏,向您展示了所有连接的设备的情况。可以使用Victron GX LTE 4G设备在您面前或从世界任何地方使用CERBO进行监视,如图纸中所示,使用VictronConnect应用程序或网站使用Victron VRM Portal。CERBO还提供远程固件更新,并允许远程更改设置。您连接到CERBO的任何内容都可以在GX Touch 70显示器上或使用:远程控制台,VRM仪表板,高级VRM小部件,VRM App Widgets和VE.Can/NMEA2000。这一切都在Cerbo手册中清楚地解释了。您可以在Victron网站上找到此手册的最新版本。

GNSS 中 AI 算法执行的可能性
人工智能算法在 GNSS 中执行的可能性 Darshna Jagiwala(1)、Shweta N. Shah(2) (1) 女科学家,DST (2) 助理教授,SVNIT,印度 摘要 大量研究验证了在全球导航卫星系统 (GNSS) 领域使用人工智能 (AI) 算法的机会。实现智能有两种方式:一种是通过机器学习 (ML),另一种是通过深度学习 (DL)。最常见的是,支持向量机 (SVM) 和卷积神经网络 (CNN) 是人工智能的重要算法,在文献中用于提高 GNSS 系统的定位精度。本文通过考虑 GNSS 接收器在射频 (RF) 前端级别、预相关级别、后相关级别和导航级别的不同阶段来进行文献综述,这将更好地理解 AI 在该领域的实施。主要研究工作是在后相关阶段进行的,其中使用了不同的数据格式,如相关输出、国家海洋电子协会 (NMEA) 数据和接收器独立交换格式 (RINEX) 数据。除此之外,本文还讨论了与 AI 算法应用相关的威胁和风险因素。1.简介 GNSS 使用精确的定时信息、定位和同步技术提供全球和实时服务。目前,美国的全球定位系统(GPS)、俄罗斯的全球导航卫星系统(GLONASS)、欧洲的伽利略(GALILEO)和中国的北斗卫星导航系统(BDS)是全面运行的GNSS系统。此外,印度的印度星座导航(NavIC)和日本的准天顶卫星系统(QZSS)都是独立自主的区域导航系统。近年来,GNSS应用越来越精确,其精确度为广泛的应用打开了大门。[1]。卫星导航系统是根据发现的物理定律设计的[2]。• GNSS系统背后的基本思想是卫星在太空中传输信号。在这里,卫星在轨道上的位置遵循开普勒行星运动定律。• 这些信号由地球表面或附近的接收器接收。扩频技术用于获取从地球轨道发射的非常微弱的卫星信号。