XiaoMi-AI文件搜索系统
World File Search SystemNavigation
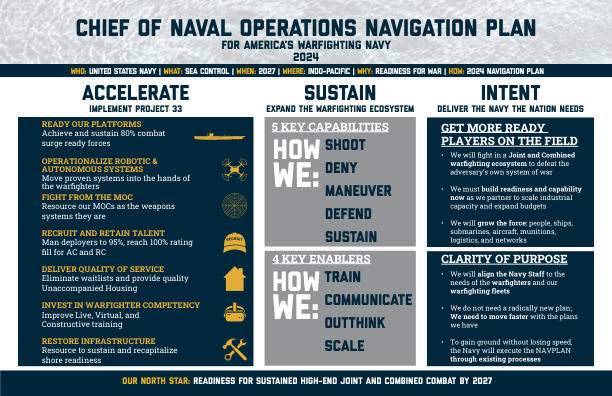
2024 年导航计划
海军作战部长 2024 年美国海军作战导航计划 对象:美国海军 | 内容:海上控制 | 时间:2027 年 | 地点:印度洋-太平洋 | 原因:备战 | 方式:2024 年导航计划
基于性能的导航 - DigitalOcean
间隔的航迹和航线允许更简单的空域设计标准,因为航线始终保持相同的宽度,并且不依赖于具有波动信号的地面导航设备发出的电子信号。这适用于 DME/DME/IRS 飞行以及 GPS(全球定位系统)飞行。DME/DME/IRS 飞行适用于尚未改装以允许 GNSS 操作且必须使用地面 DME 站的传统飞机。能够进行 GNSS 飞行的飞机和机组人员可以利用 RNP 和 RNAV 程序,从而允许与 DME/DME/IRS 混合的环境,以更好地利用间隔紧密的航线和各种空域配置,这些配置可以开发以增强 ATC 功能。
NAVWAR - 导航战
一位同事在深夜打了很多次与测试有关的电话后听力受损,他说:“我们可以马上回家了。我们的部队已收到警报,并意识到导航干扰是一个真正的威胁。在我们按下启动按钮之前,目标就已经实现了!”

空间通信与导航
频段 无线电业务 频段 无线电业务 401-403 MHz EESS (Es) 432-438 MHz eess(有源) 460-470 MHz [eess (sE)] 1215-1300 MHz EESS(有源) 1525-1535 MHz eess 3100-3300 MHz eess(有源) 1690-1710 MHz [eess (sE)] 5250-5570 MHz EESS(有源) 2025-2110 MHz EESS (Es) (ss) 8550-8650 MHz EESS(有源) 2200-2290 MHz EESS (sE) (ss) 9200-9800 MHz EESS(有源) 7190-7250 MHz EESS (Es) 9800-9900 MHz eess(有源) 8025-8400 MHz EESS (sE) 9900-10400 MHz EESS (有源) 13.75-14 GHz eess 13.25-13.75 GHz EESS (有源) 25.5-27 GHz EESS (sE) 17.2-17.3 GHz EESS (有源) 28.5-30 GHz eess (Es) 24.05-24.25 GHz eess (有源) 29.95-30 GHz eess (Es)(ss) 35.5-36 GHz EESS (有源) 37.5-40 GHz eess (sE) 78-79 GHz [EESS (有源)] 40-40.5 GHz EESS (Es) / eess (sE) 94-94.1 GHz EESS (有源) 65-66 GHz EESS 130-134 GHz EESS(有源)

导航中心-Navcen.uscg.gov
35-47-56N 122-09-23W调查将在租赁区域内以及潜在潜在海底出口电缆坐着走廊内的租约区域内进行。这些潜在的海底出口电缆坐着走廊将是狭窄的区域,宽度高达6,562英尺(2,000米),将

定位、导航和授时
全球定位系统 (GPS) 涉及世界经济的几乎每个方面;预计到 2025 年,依赖 GPS 的服务将成为一个价值 1464 亿美元的产业。1目前,GPS 的用户超过 45 亿,其中包括大多数美国军事系统和美国的几个关键基础设施部门。GPS 也是少数几个全球导航卫星系统 (GNSS) 之一。六十多年来,航空航天公司一直领导着 GPS 和更广泛的定位、导航和授时 (PNT) 功能的概念化、开发、实施、现代化和持续创新。GPS 是 PNT 的核心要素,但 PNT 的替代和补充源可以提供更大的信号可用性,有助于确保 GPS 信号的完整性,并在 GPS 访问受限或被拒绝时(例如在复杂地形或有争议的环境中)确保 PNT 解决方案。

现代导航 - SmartCockpit
2.1 一般概念................................................................................................................................................7 2.1.1 定义...................................................................................................................................................7 2.1.2 性能要求............................................................................................................................................8 2.1.3 功能要求............................................................................................................................................9 2.2 RNP 空中空间环境及实施.........................................................................................................................11 2.2.1 无线电导航设施覆盖范围内的 RNP 航路.........................................................................................................11 2.2.2 无线电导航设施覆盖范围外的 RNP 航路.........................................................................................................11 2.2.3 采用 RNP 的 RNAV 非精密进近.........................................................................................................11 2.3 飞机导航系统.........................................................................................................................................12 2.3.1 航空器设备.........................................................................................................................................12 2.3.2 导航系统能力.........................................................................................................................................13 2.3.3 MEL 要求................................................................................................................................19 2.4 RNP 操作........................................................................................................................................22 2.4.1 基于无线电导航基础设施的 RNP-5(或 RNP-4)........................................................................22 2.4.2 PRNAV......................................................................................................................................26 2.4.3 远洋或偏远地区的 RNP-10.............................................................................................................26