XiaoMi-AI文件搜索系统
World File Search SystemOBJECT


AKB-48:现实世界中阐明的对象知识库
人类的生命中有铰接的物体。对清晰的物体的综合理解,即外观,结构,物理特性和语义,将使许多研究社区受益。作为当前的符号对象理解解决方案通常是基于具有无物理属性的CAD模型的合成对象数据集,从而阻止了在视觉和机器人任务中的实现对现实世界应用的满足概括。为了弥合差距,我们提出了AKB-48:一个大规模的对象k nowledge b ase,由48个猫咪的2,037个现实世界3D 3D铰接式对象模型组成。每个对象由知识图Artikg描述。为了构建AKB-48,我们提出了快速的发音知识建模(FARM)管道,可以在10-15分钟内满足铰接对象的Artikg,并在很大程度上降低了Real

使用机械影响,粘弹性的对象识别...
摘要 - 电流机器人触觉对象识别依赖于从运动相互作用信号(例如力,振动或位置)得出的统计措施。可以从这些信号估算的机械性能是可能产生更强大对象表示的内在对象属性。因此,本文提出了一个使用多种代表性的机械特性的对象识别框架:刚度,粘度和摩擦系数以及恢复原状的系数,很少被用于识别对象。这些属性是使用双重卡尔曼滤波器实时估计的(无切向力量测量),然后用于对象clasinition和clustering。通过触觉探索识别20个对象的机器人,对所提出的框架进行了测试。结果证明了该技术的有效性和效率,并且所有四个机械性能都是最佳识别率为98.18±0.424%所必需的。对于对象聚类,与基于统计参数的方法相比,这些机械性能的使用也可以提高性能。

无数的全闪存规模输出文件和对象存储
量子提供为AI时代设计的端到端数据管理解决方案。拥有超过四十年的经验,我们的数据平台使客户可以从其独特的非结构化数据中提取最大价值。从为AI应用和苛刻的数据密集型工作负载提供动力的高性能摄入,到大量耐用的数据湖泊,以促进AI模型,量子提供了最全面,最具成本效益的解决方案。生命科学,政府,媒体和娱乐,研究和工业技术信任量子的领先组织及其最有价值的资产 - 他们的数据。Quantum在NASDAQ(QMCO)上列出。有关更多信息,请访问www.quantum.com。

使用最佳定位的基于视觉的对象跟踪...
在定位和跟踪应用中,位置估计的准确性受到能够提供相对目标测量值的传感器/信标数量的影响。虽然单个传感器/信标是最容易实现的系统,但必须进行多次测量才能确保位置信息的准确性。多个传感器/信标可以实现更及时的位置验证,但会增加系统复杂性。例如,传感器/信标的属性及其相对于目标物体的几何形状会影响系统的准确性。如果相同的传感器/信标太近,它们将提供几乎相同的信息,对知识库的补充很少。如果传感器/信标相距太远,可能会遗漏一些重要信息。因此,最佳传感器/信标间距介于这两个极端之间。本文将进一步探讨一种控制传感器/信标阵列几何形状的方法,以在实验期间保持最佳跟踪性能配置。
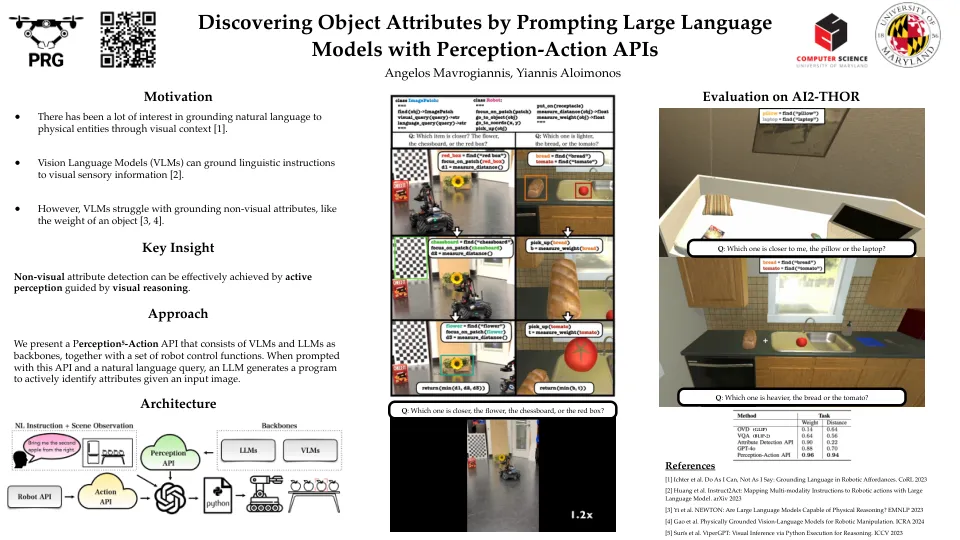
通过提示大语言来发现对象属性
我们提出了一个由VLM和LLMs组成的p API API,以及一组机器人控制功能。使用此API和自然语言查询提示时,LLM会生成一个程序来积极识别给定输入图像的属性。
铁路轨道和电力生成上的对象检测
现代铁路系统需要一个可靠的框架,以优先考虑安全,效率和可持续性。这种集成的方法结合了先进的火车保护机制,智能平台技术以及通过涡轮机的可再生能源产生,以创建更安全,更环保的铁路运输环境,该系统通过控制火车速度和运动来防止事故,并在必要时自动应用制动器。安装在火车和轨道上的传感器提供有关火车性能,轨道状况和使用机器学习算法的潜在危害的连续数据,该系统可以分析数据以预测潜在的事故,从而使积极的措施可以建立一个可靠的通信网络,以连接火车,控制中心,并确保对新兴的紧急响应。小型涡轮机可以安装在火车平台或相邻区域上,以利用高速行驶的火车产生的风能。这种可持续的能源可以为平台系统供电并提高整体效率。整合电池系统以存储生成的能源可以提供可靠的电源,尤其是在高峰使用时间

基于激光雷达的强度感知室外3D对象检测
摘要:基于激光雷达的3D对象检测和定位是自动导航系统的关键组成部分,包括自动驾驶汽车和移动机器人。大多数基于LIDAR的3D对象检测和定位方法主要使用LIDAR点云中的几何或结构特征抽象。但是,由于不利的天气条件或高度散射培养基的存在,这些方法可能会因环境噪声而易受环境噪声。在这项工作中,我们提出了一个强度感知的体素编码器,用于鲁棒3D对象检测。提出的体素编码器生成了一个强度直方图,该强度直方图描述了体素内点强度的分布,并用于增强体素特征集。我们将此强度感知的编码器集成到有效的单级体素检测器中,以进行3D对象检测。使用Kitti数据集获得的实验结果表明,我们的方法相对于3D检测中的CAR对象的最新方法,从鸟类的视图和行人和环体对象获得了可比的结果。此外,我们的模型可以在推理期间达到40.7 fps的检测率,该检测率高于最新方法的检测率,并产生较低的计算成本。

基于视觉的实时空中物体定位和... - arXiv
摘要 — 本文主要研究基于视觉的无人机导航障碍物检测与跟踪问题。通过将物体检测和跟踪有效地集成到动态卡尔曼模型中,开发了一种单目图像序列的实时物体定位和跟踪策略。在检测阶段,通过每帧图像背景连通性提示计算出的显著性图自动检测和定位感兴趣的物体;在跟踪阶段,采用卡尔曼滤波器对物体状态进行粗略预测,然后通过结合显著性图和两个连续帧之间的时间信息的局部检测器进一步细化预测。与现有方法相比,所提出的方法不需要任何手动初始化跟踪,运行速度比同类最先进的跟踪器快得多,并且在大量图像序列上实现了具有竞争力的跟踪性能。大量实验证明了所提出方法的有效性和优越性能。

开放式对象检测的生成区域训练
在最近的研究中,已对开放式摄制对象检测任务进行了大量关注,旨在概括训练期间标记的类别的有限级别,并检测推理时任意类别名称所描述的对象。与常规对象检测相比,打开的词汇对象检测在很大程度上扩展了对象检测类别。但是,它依赖于计算图像区域与一组具有验证视觉和语言模型的任意类别名称之间的相似性。这意味着,尽管具有开放式的性质,但该任务仍然需要在推理阶段的预定义对象类别。这提出了一个问题:如果我们在推理中对对象类别没有确切的了解,该怎么办?在本文中,我们称之为新的设置为生成性开放式对象检测,这是一个更普遍和实际的问题。为了解决它,我们将对象检测形式为生成问题,并提出了一个名为generateu的简单框架,该框架可以检测密集的对象并以自由形式的方式生成其名称。尤其是,我们采用可变形的DETR作为区域促成生成器,其语言模型将视觉区域转换为对象名称。为了评估自由形式的对象划分任务,我们介绍了一种评估方法,旨在定量测量生成量的性能。广泛的实验表明我们的生成量强烈的零射击性能。代码可在以下网址获得:https://github.com/foundationvision/generateu。例如,在LVIS数据集上,我们的GenerateU在推理过程中属于类别名称,即类别名称无法看到类别名称,即使类别名称看不见类别名称,我们的GenerateU也可以与开放式唱机对象检测方法GLIP相当。