XiaoMi-AI文件搜索系统
World File Search SystemOPA

人类皮质场景处理的发展
在过去的三十年中,研究大大提高了我们对成人人类场景的理解,发现了三个“场景选择”大脑区域的网络:Parahippocampal Place区域(PPA; Epstein&Kanwisher,1998),枕形区域(OPA; Dilks等,2013)和reverosplenial(refosplenial; ragu complect; ragu; ragu; ragu; ragu; ragu; rague; ragu; rag rsc; rag rsc; rsc; rag rsc; rcy; rsc; rag rsc; rsc; rsc;这些区域是所谓的场景选择性的,因为它们每个区域对场景图像的响应大约是对象,面部和其他类别的响应,但有趣的是,每个在场景处理中播放的特定功能上有所不同。具体来说,我们最近提出,PPA支持我们将场景识别为特定位置(场景分类)的能力,OPA支持我们在立即可见的位置(视觉引导导航)导航的能力,RSC支持我们在更广泛的环境中导航的能力(基于MAP基于MAP的NavigaTion; Dilks et eilks et; Dilks等。1)。但是皮质场景如何发展?要在此问题上获得最初的牵引力,最早的
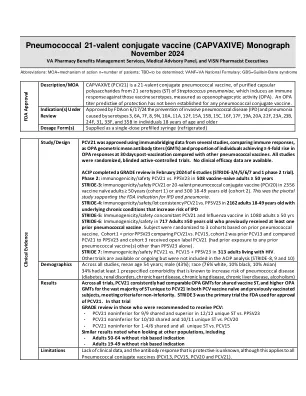
肺炎球菌 21 价结合疫苗 (CAPVAXIVE) 专著 2024 年 11 月
研究/设计 PCV21 获得批准,使用了多项研究的免疫桥接数据,比较了免疫反应,如 OPA 几何平均抗体滴度 (GMT) 和接种后 30 天内与其他肺炎球菌疫苗相比 OPA 反应增加 ≥ 4 倍的个体比例。所有研究均为随机、盲法活性对照试验。没有可用的临床疗效数据。ACIP 于 2024 年 2 月完成了对 6 项研究(STRIDE-3/4/5/6/7 和 1 项 2 期试验)的 GRADE 审查。第 2 阶段:在 508 名 ≥ 50 岁未接种疫苗的成年人中,PCV21 与 PPSV23 的免疫原性/安全性 STRIDE-3:在 2356 名 ≥ 50 岁未接种疫苗的成年人(队列 1)或 300 名 18-49 岁(队列 2)中,PCV21 或 20 价肺炎球菌结合疫苗 (PCV20) 的免疫原性/安全性。这是支持 FDA 针对 IPD 和肺炎的适应症的关键研究。 STRIDE-4:在 2162 名 18-49 岁患有潜在慢性疾病(会增加 IPD 风险)的成人中,PCV21 与 PPSV23 的免疫原性/安全性/批次一致性 STRIDE-5:在 1080 名 ≥ 50 岁的成人中,PCV21 和流感疫苗同时接种的免疫原性/安全性 STRIDE-6:在 717 名 ≥ 50 岁且曾接种过至少一次肺炎球菌疫苗的成人中,进行免疫原性/安全性测试。根据之前的肺炎球菌疫苗接种情况,受试者被随机分为 3 个组。组 1 = 之前的 PPSV23,比较 PCV21 与 PCV15,组 2 是之前的 PCV13,并将 PCV21 与 PPSV23 进行比较,组 3 接受了开放标签 PCV21(之前曾接触过除 PPSV23 以外的任何肺炎球菌疫苗)。 STRIDE 7:313 名 HIV 感染成人中 PCV21 与 PCV15 + PPSV23 的免疫原性/安全性。其他试验可用或正在进行,但未包含在 ACIP 分析中(STRIDE-8、9 和 10)人口统计所有研究中,平均年龄 54 岁;男性(43%);种族(76% 白种人、10% 黑人、10% 亚洲人)34% 患有至少一种已知会增加肺炎球菌疾病风险的预先指定的合并症(糖尿病、肾脏疾病、慢性心脏病、慢性肺病、慢性肝病、酗酒)结果在所有试验中,PCV21 在共享疫苗 ST 中始终具有可比的 OPA GMT,并且对于 PCV21 独有的绝大多数 ST 具有更高的 OPA GMT,无论是 PCV 疫苗初次接种还是之前接种过疫苗的受试者,都符合非劣效性标准。 STRIDE 3 是 FDA 用于批准 PCV21 的主要试验。在该试验中,GRADE 对建议接受 PCV 治疗的患者进行了评估:

危险材料和废物管理计划
UT HSC 将与选择、处理、储存、运输、使用和处置危险气体和蒸汽相关的风险降至最低。注意:危险气体和蒸汽包括但不限于 OPA、PAA 甲醛、使用烧灼设备和激光时产生的蒸汽以及一氧化二氮等气体。请参阅程序 HM-08-016(环境/职业监测和医疗监督)、HM-08-018(危险通报)和 HM-08-017(灭菌剂/消毒剂安全工作规范)。

石油和管道局 2022-23 年度账目
• 我们继续安全工作,没有对员工造成重大伤害。今年,COVID-19 病毒的影响显著减少,对业务没有运营影响。• OPA 完全满足皇家海军的燃料需求要求,并为我们的商业客户安全储存产品。• 我们在整个 2022-23 年继续实现合规目标,并已通过没有不合规储罐仍在使用的重要里程碑。12 个大型储罐已完成维护,增加了容量,从而提高了我们为客户提供的服务能力。• 我们的运营维护协调员正在为空军司令部提供宝贵的技术支持。• 我们的团队与国防部的国防基础设施组织 (DIO) 合作良好,安全地启用了 Gosport 升级后的仓库。• 2023 年 5 月完成 Thanckes 码头的移交。• 我们的学徒计划继续取得巨大成功,已有数人完成学徒期。我们仍有一些人正在努力完成机械技师、电气技师和工艺操作员的学徒期。我们计划在明年招募更多学徒。• 2023 年 1 月,我们的赞助商代表从 Amanda McKenna 改为 Fay Sandford,OPA 董事会发生了小幅变化。
缅因州北部可靠性和费率稳定性利益相关者小组
• GEO • PUC • OPA • NMISA • 缅因州北部的市政府 • 位于缅因州北部的大型工业电力公用事业客户 • 代表位于缅因州北部的企业的贸易协会 • 代表林产品行业的贸易协会 • 为缅因州北部服务的投资者所有的输配电公用事业公司 • 位于缅因州北部的两家不同的消费者所有的输配电公用事业公司 • 位于缅因州北部的一家能源生产商 • 公众成员

西南地区次级规划 - 2024 年 10 月
西南地区次级规划适用于伦敦市西南部的土地,通常以 Southdale 路西、White Oak 路、Exeter 路、Wellington 路南、Green Valley 路和伦敦规划图 1 上标明的城市增长边界为界。该次级规划占地约 2,700 公顷,是市政府主导的一项进程的结果,旨在指导该市最后也是最大的土地储备之一的长期管理和增长审批,未来 50 多年,很大一部分增长将被吸收。该计划是通过全面的公众和机构咨询过程、当前政策方向以及对机会和制约因素的分析制定的。(OPA

大脑解剖:fMRI 训练的网络揭示自然图像处理中的空间选择性
深度神经网络 (DNN) 特征与皮质反应之间的一致性目前为更高级的视觉区域提供了最准确的定量解释 [1、2、3、4]。与此同时,这些模型特征也被批评为无法解释的解释,将一个黑匣子(人脑)换成了另一个黑匣子(神经网络)。在本文中,我们从头开始训练网络,让其直接从大量自然场景数据集中预测大脑对图像的反应 [5]。然后,我们采用“网络解剖” [6],这种方法通过识别和定位图像中已训练网络各个单元的最显著特征来增强神经网络的可解释性,并已用于研究人脑的类别选择性 [7]。我们采用这种方法创建了一个假设中性模型,然后使用该模型探索类别选择性之外的特定视觉区域的调节特性,我们称之为“大脑解剖”。我们使用大脑解剖来检查一系列生态上重要的中间特性,包括深度、表面法线、曲率和物体关系,并发现顶叶、侧部和腹侧视觉流子区域之间存在一致的特征选择性差异。例如,在三个场景选择网络中,我们发现 RSC 更喜欢远深度和平面水平表面法线,而 OPA 和 PPA 更喜欢近深度和中深度以及垂直表面法线,这表明在 RSC 和 OPA/PPA 中用于场景表示的空间坐标系发生了变化。这些发现有助于更深入、更细致地了解人类视觉皮层在观看自然场景时的功能特征。项目网站:https://brain-dissection.github.io/ 。
基于上下文对象识别的因果神经机制
抽象对象可以根据其内在特征(包括形状,颜色和纹理)识别。但是,在日常生活中,这种特征通常不明确,例如,当物体出现在外围,杂物中或远处时。有趣的是,当对象在其典型场景上下文中看到对象时,对象识别仍然可以高度准确。基于上下文对象识别的神经机制是什么?根据并行处理帐户,基于上下文的对象识别是由对象和场景信息在单独的路径中的并行处理支持的。然后将这些途径的输出组合在下游区域中,从而在对象识别中获得上下文益处。另外,根据反馈帐户,基于上下文的对象识别受(直接或间接)从场景选择性到对象选择区域的反馈支持。在这里,在三个预注册的经颅磁刺激(TMS)实验中,我们测试了反馈假设的关键预测:该场景选择性皮质因果关系和选择性地支持基于上下文的对象识别,然后才能识别对象选择性皮层。早期视觉皮层(EVC),对象选择性的枕叶皮层(LOC)和场景选择性枕骨位置(OPA)在相对于刺激发作的三个时间点刺激,而参与者则在不同的试验中分别对场景和完整对象进行分类。这些结果表明,基于上下文的期望通过在视觉皮层中删除对象表示来有助于对象识别。结果证实了我们的预测:相对于孤立的对象识别,基于上下文的对象识别在发作后160-200毫秒被OPA选择性和因果支持,然后在发作后的260-300 ms下进行LOC。

增强的非线性吸收和光致发光特性
摘要在这项研究中,掺杂元元件对超声喷涂的Moo 3薄膜的线性,非线性吸收和光学限制特性的影响。线性光学结果表明,随着带量的缺陷状态的密度与掺杂的密度增加,并结合使用带隙能量和URBACH能量的增加。广泛的光致发光排放在350和600 nm的范围内,通过掺杂降低了强度。揭示了对非线性吸收(NA)行为的缺陷效应,使用两个理论模型分析了OA Z-SCAN数据,仅考虑两种光子吸收(2PA)(模型1)和一个光子吸收(OPA),2PA和自由载体吸收(模型2)。观察到NA行为,并发现由于新的氧空位和进一步缺陷状态的形成而产生的输入强度和掺杂原子会增强。模型2中薄膜的Na系数比模型1中的2PA系数高100倍。该结果揭示了缺陷状态对NA行为的强烈影响。在研究的掺杂原子中,由于缺陷态密度较高,CU导致Na增强。虽然真正的2Pa是V和Fe掺杂的MOO 3薄膜的主要Na机制,但OPA和2PA是Ni,Zn和Cu掺杂的MOO 3薄膜的主要Na机制,因为它们的缺陷状态较高。Cu掺杂的MOO 3薄膜的光学限制阈值为0.026 MJ / cm 2,这是由于其增强的Na行为。考虑到获得的结果,这项研究为可见的波长区域中的光学限制器打开了掺杂的MOO 3薄片的潜力的门。
缅因州零售供应和标准报价服务改革
作为 2000 年电力公用事业重组的一部分,缅因州允许非公用事业 CEP 向缅因州消费者供电。从总体上看,鲍德温报告的结论是,竞争性电力市场对住宅客户的预期利益(包括承诺的定价和产品创新)尚未实现。因此,OPA 建议逐步淘汰住宅 CEP 服务。虽然有些 CEP 确实为有限数量的缅因州消费者提供了好处,但总体而言,这项服务并没有给缅因州消费者带来好处。这反映在以下事实中:大约 10% 的缅因州住宅消费者从 CEP 购买电力,而对于那些这样做的少数人来说,尤其是低收入消费者,他们支付的费用总计远高于标准报价 (SO) 价格。