XiaoMi-AI文件搜索系统
World File Search SystemOPTIMA

2024调节随机景观的复杂性...
边缘最佳选择是具有许多几乎弯曲方向的功能的最小值或最大值。在具有许多竞争优势的设置中,边际趋向于吸引算法和物理动态。通常,边缘吸引子的重要家族是少数群体消失的少数群体,而非横向优点和其他不稳定的固定点。我们引入了一种通用技术,用于调节其边缘性的随机景观中固定点的统计数据,并将其应用于具有质量不同的各种各向同性的环境中:在球形旋转镜中,能量是高斯,其Hessian是高斯式的正脉(Goe);在多球形旋转眼镜中,是高斯但非goe的;并在非高斯的平方球随机函数的总和中。在这些问题中,我们能够充分表征边际最佳选择在景观中的分布,包括在少数群体中。
减少碳减少计划2024致力于实现...
基线排放足迹是一个关键指标,可作为Optima Plus Plus Plus招募,过程或产品在特定时期内产生的总温室气体的初步测量。本基线提供了一个参考点,可以将未来的排放量进行比较,从而鉴定趋势和减排策略的有效性。建立基线对于设定现实而实现的目标对于减少碳排放和跟踪随着时间的推移而言至关重要。它还可以帮助组织遵守法规要求,并支持向利益相关者提供有关其环境影响的透明报告。基线计算涵盖了Optima和招聘的操作。

PS电池。indd-亚特兰大
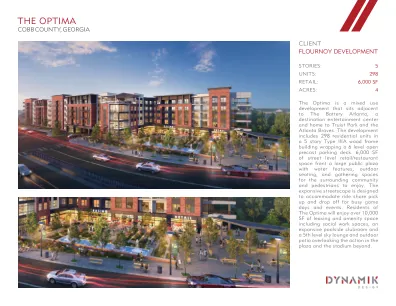
Optima是靠近亚特兰大电池,目的地娱乐中心以及Truist Park和Atlanta Braves的家的混合用途开发。该开发项目包括5层型IIIA木框建筑中的298个住宅单元,包装了6级开放预制停车场。6,000平方英尺的街道零售/餐厅空间前面有一个大型公共广场,带有水特征,户外座位以及为周围社区和行人聚集空间。宽敞的街景旨在容纳乘车共享和下车,以在繁忙的比赛日和活动中下车。Optima的居民将享受超过10,000平方英尺的租赁和便利空间,包括社交工作空间,宽敞的池畔俱乐部房间以及第五级的Sky Lounge和户外露台,俯瞰广场和体育场的行动。

2025 年春季培训计划
访问 CASA 办公室 第 5 节:第一次案件分配和法庭观察 与主管一起参加预定的会议:挑选新案件、审查文件、安排与 FCM 的会议、制定案件计划、安排法庭观察、最佳培训
综合卢斯 - GIS建模,用于增强叙利亚Ghamima河流域的土壤侵蚀管理
的石油侵蚀是面临农业土地系统环境和经济可持续性面临的批评。i t被认为是叙利亚海岸地区的生态系统最重要的问题之一。这项工作旨在评估Ghamima River Bas中的Soil Eros离子风险的分布,尤其是缺乏必要的数据。出于目的,与系统(GIS)的地理信息(GIS)和遥感(RS)数据集成的修订环境损失方程(Rusle)模式用于制定Optima l s Optima l s Oima l s油性管理计划并评估EROS离子风险水平。结果表明,ghamima riv er盆地的土壤损失率在0-60吨HA-1年度之间。创建了风险图上最终的SOI LEROSI,并将其分类为五个风险水平:非常低(47.31%),低(28.38%),中等(12.61%),高(6.39%)和非常高(5.31%)。t暴露于高度且极高的S油脂风险。因此,这些结果被依靠来支持决策者采取措施减轻石油侵蚀风险的负面影响,并设计了石油protect策略,以在高风险区域和高风险区域中培养EROS离子的加速。

使用均质化方法在结构设计中生成最佳拓扑
拓扑优化是功能最广泛的结构优化方法之一。但是,为了换取其高水平的设计自由,典型的拓扑优化无法避免存在多个本地Optima的多模态。这项研究的重点是开发无梯度拓扑优化框架,以避免被捕获不良的本地Optima。它的核心是数据驱动的多项性拓扑设计(MFTD)方法,其中通过求解低指标拓扑优化概率生成的设计候选者通过深入的生成模型和高级授权评估进行了更新。作为其关键组件,深层生成模型将原始数据压缩为低维歧管,即潜在空间,并随机将新的设计候选者安排在整个空间上。尽管原始框架是无梯度的,但其随机性可能导致结合变异性和过早收敛性。受到进化算法的流行跨界操作(EAS)的启发,本研究合并了数据驱动的MFTD框架,并提出了一种新的交叉操作,称为潜在交叉。我们将提出的方法应用于2D结构机械的最大应力最小化问题。结果表明,潜在跨界改善了与原始数据驱动的MFTD方法相对的收敛稳定性。此外,优化的设计表现出与使用p-norm测量的常规基于梯度的拓扑优化相当或更好的性能。[doi:10.1115/1.4064979]

使用协作尖峰神经网络求解二次不受约束的二进制优化
摘要 - 次数不受约束的二进制优化(QUBO)问题成为一种有吸引力且有价值的优化问题,因为它可以轻松地转换为各种其他组合优化问题,例如图形/数字分区,最大值,SAT,SAT,Vertex,Vertex,Vertex,TSP,TSP等。其中一些问题是NP-HARD,并广泛应用于行业和科学研究中。同时,已经发现Qubo与两个新兴的计算范式,神经形态计算和量子计算兼容,具有巨大的潜力,可以加快未来的优化求解器。在本文中,我们提出了一种新型的神经形态计算范式,该计算范式采用多个协作尖峰神经网络来解决QUBO问题。每个SNN进行局部随机梯度下降搜索,并定期分享全球最佳解决方案,以对Optima进行元效力搜索。我们模拟了模型,并将其与无协作的单个SNN求解器和多SNN求解器进行比较。通过对基准问题的测试,提出的方法被证明在寻找QUBO Optima方面更有效。具体来说,它在无协作和单SNN求解器的情况下分别在多SNN求解器上显示X10和X15-20加速。索引术语 - 数字计算,尖峰神经网络作品,组合优化,QUBO