XiaoMi-AI文件搜索系统
World File Search SystemORIN

dsboard-ornx
dsboard-ornx是一个工业运营商板,专为需要高处理能力和可靠性的恶劣环境和应用而设计。它基于NVIDIA ORIN NX System-On-Module(SOM),该系统具有多个NVIDIA AMPERE GPU核心和ARM64 CPU核。载体板的紧凑设计使其成为广泛的工业应用程序(例如自主系统,机器人技术和智能视频分析)的多功能和灵活解决方案。

边缘点AI快速启动参考
Edgepoint AI是NVIDIA™Jetson Xavier™和Orin™NX的载体板,设计为高度可配置和开放的平台。EdgePoint AI支持多种用例和摄入选项,用于开发和部署AI/ML模型以及边缘的流处理管道。这包括能够通过RF,Vita-49,光学和工业视觉(Cameralink)应用的PCIE Gen 3x8插槽轻松与EDT的I/O接口配对。

nvidia驱动力下一代运输
Byd是世界上最大的电动汽车制造商,将其与Nvidia的持续合作从汽车扩展到云。除了在Drive Thor上构建其下一代EV机队外,BYD计划将NVIDIA的AI基础设施用于基于云的AI开发和培训技术,以及NVIDIA ISAAC™和NVIDIA OMNIVERSE™平台为虚拟工厂计划和零件配置者开发工具和应用程序。GAC Aion拥有的高级豪华品牌 Hyper宣布已选择Drive Thor作为其下一代电动汽车,该电动汽车将于2025年以4级驾驶功能开始生产。 Hyper当前正在使用Nvidia Drive Orin为其旗舰型号Hyper GT供电,该型号具有高级2级以上的驾驶功能。 Xpeng还宣布,它将使用Nvidia Drive Thor平台作为其下一代电动汽车舰队的AI大脑。 下一代汽车计算机将为电动汽车制造商专有的XNGP AI辅助驾驶系统提供动力,从而实现自动驾驶和停车功能,驾驶员和乘客监控以及其他功能。Hyper宣布已选择Drive Thor作为其下一代电动汽车,该电动汽车将于2025年以4级驾驶功能开始生产。Hyper当前正在使用Nvidia Drive Orin为其旗舰型号Hyper GT供电,该型号具有高级2级以上的驾驶功能。Xpeng还宣布,它将使用Nvidia Drive Thor平台作为其下一代电动汽车舰队的AI大脑。下一代汽车计算机将为电动汽车制造商专有的XNGP AI辅助驾驶系统提供动力,从而实现自动驾驶和停车功能,驾驶员和乘客监控以及其他功能。

丰田,Aurora和Continental加入NVIDIA合作伙伴的成长名单,将下一代高度自动化和自动驾驶汽车舰队
本新闻稿中的某些陈述包括但不限于:NVIDIA产品,服务和技术的好处,影响和性能,包括NVIDIA加速计算和AI,NVIDIA DRIVE AGX ORIN,NVIDIA DRIVEOS操作系统; NVIDIA CUDA AV平台,NVIDIA DRIVE ORIN,NVIDIA DGX系统,Nvidia Omniverse平台和NVIDIA OVX系统; Nvidia Cosmos,第三方使用或采用NVIDIA的产品和技术,收益和影响以及其产品的功能,性能和可用性;汽车是最大的AI和机器人行业之一; NVIDIA带来了二十年的汽车计算,安全专业知识及其CUDA AV平台来转变数万亿美元的汽车行业,这是前瞻性陈述,这些陈述受风险和不确定性的影响,可能会导致结果与期望实质上不同。向SEC提交的报告的副本已发布在公司网站上,可在NVIDIA上免费获得。这些前瞻性陈述不能保证未来的绩效,并且仅在此日期开始说话,除了法律要求外,Nvidia违反了更新这些前瞻性陈述以反映未来事件或情况的任何义务。可能导致实际结果差异的重要因素包括:全球经济状况;我们依靠第三方制造,组装,包装和测试我们的产品;技术发展和竞争的影响;开发新产品和技术或对我们现有产品和技术的增强;市场接受我们的产品或合作伙伴的产品;设计,制造或软件缺陷;消费者偏好或需求的变化;行业标准和界面的变化;集成到系统中时,我们的产品或技术的性能意外丧失;以及其他因素不时详细介绍了与美国证券交易委员会(SEC)或SEC的NVIDIA文件中详细介绍的,包括但不限于其表格10-K和表格10-Q的季度报告的年度报告。

文章 用于先进低空航空应用的集成人工智能操作系统
摘要:本文介绍了一种专为低空航空应用量身定制的综合人工智能操作系统,该系统集成了尖端技术,以提高性能、安全性和效率。该系统由六个核心组件组成:OrinFlight OS,一种针对实时任务执行优化的高性能操作系统;UnitedVision,一种支持高级图像分析的多功能视觉处理模块;UnitedSense,一种提供精确环境建模的多传感器融合模块;UnitedNavigator,一种动态路径规划和导航系统;UnitedMatrix,支持多无人机协调和任务执行;UnitedInSight,一个用于监控和管理的地面站。在 UA DevKit 低代码平台的补充下,该系统促进了用户友好的定制和应用程序开发。利用 NVIDIA Orin 的计算能力和先进的 AI 算法,该系统解决了现代航空中的复杂挑战,为导航、感知和协作操作提供了强大的解决方案。这项工作重点介绍了系统的架构、功能和潜在应用,展示了其满足智能航空环境需求的能力。
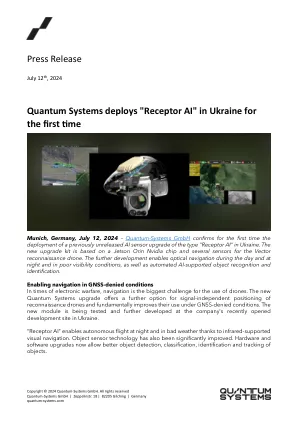
量子系统在乌克兰部署“受体AI”
慕尼黑,德国,2024年7月12日 - QumbH的QumbH pripermers在乌克兰的“受体AI”类型的先前未发行的AI传感器升级的部署。新的升级套件是基于Jetson Orin Nvidia芯片和矢量侦察无人机的几个传感器。进一步的开发可以在白天和晚上,可见性条件下以及自动化的AI支持的对象识别和识别中实现光学导航。在电子战时,在GNSS贬低的条件下导航,导航是使用无人机的最大挑战。新的量子系统升级为侦察无人机的信号无关定位提供了进一步的选择,并从根本上改善了其在GNSS贬值条件下的使用。该公司最近在乌克兰开放的开发网站进行了测试并进一步开发。“受体AI”可以通过红外支撑的视觉导航在晚上和恶劣天气下实现自主权。对象传感器技术也得到了显着改进。硬件和软件升级现在可以更好地检测对象检测,分类,识别和跟踪对象。

我们准备好在自动驾驶中进行实时激光雷达语义细分吗?
摘要 - 在自动移动和机器人系统的感知框架内,对Lidars通常生成的3D点云的语义分析是许多应用程序的关键,例如对象检测和识别以及场景重建。场景语义分割可以通过将3D空间数据与专门的深神经网络直接整合在一起来实现。尽管这种类型的数据提供了有关周围环境的丰富几何信息,但它也提出了许多挑战:其非结构化和稀疏性质,不可预测的规模以及苛刻的计算要求。这些特征阻碍了实时半分析,尤其是在资源受限的硬件 - 构造方面,构成了许多机器人应用的主要计算组件。因此,在本文中,我们研究了各种3D语义分割方法,并分析了其对嵌入式NVIDIA JETSON平台的资源约束推断的性能和能力。我们通过标准化的培训方案和数据增强进行了公平的比较,为两个大型室外数据集提供了基准的结果:Semantickitti和Nuscenes。

通过无人机检查自动太阳能检查的实时对象检测
摘要:太阳能检查需求的机器人任务敏捷和精确的对象检测策略。本文介绍了一个创新的基于关键的对象检测框架,专门为使用无人机实时的太阳能农场检查而设计。脱离常规边界框或细分方法,我们的技术着重于检测太阳能电池板的顶点,太阳能电池板的顶点比传统方法提供了更丰富的粒度。从Centernet中汲取灵感,我们的体系结构已针对Nvidia Agx Jetson Orin等嵌入式平台进行了优化,以1024×1376像素的分辨率达到接近60 fps,因此超过了相机的操作频率。这样的实时功能对于在时间关键的工业资产检查环境中有效的机器人操作至关重要。我们的模型的设计强调了减少的计算需求,将其定位为现实部署的实用解决方案。此外,积极学习策略的整合有望大大减少注释工作,并增强模型的运营可行性。总而言之,我们的研究强调了基于关键的对象检测的优势,为使用无人机的实时太阳能农场检查提供了一种实用有效的方法。

nvautonet:快速准确的360DEG 3D自动驾驶视觉感知
实现强大而实时的3D感知是自动驾驶汽车的基础。虽然大多数现有的3D感知方法优先考虑检测准确性,但十个忽略了关键方面,例如计算效率,板载芯片部署友好性,对传感器安装偏差的韧性以及对各种VE-HILE类型的适应性。为了应对这些挑战,我们提出了nvautonet:一种专业的鸟类视图(BEV)感知网络 - 针对自动化车辆的明确量身定制。nvautonet将同步的相机图像作为输入,并预测3D信号(例如障碍物,自由空间和停车位)。NVAUTONET架构(图像和Bev Back-bones)的核心依赖于有效的卷积网络,该网络使用Tensorrt优化了高性能。我们的图像到BEV转换采用简单的线性层和BEV查找表,从而确保了快速推理速度。Nvautonet在广泛的专有数据集中受过培训,在NVIDIA DRIVE ORIN SOC上以每秒53帧的速度运行,始终达到升高的感知精度。值得注意的是,Nvautonet表现出对不同汽车模型产生的偏差偏差的韧性。此外,Nvautonet在适应各种车辆类型方面表现出色,这是通过廉价模型的微调程序来促进的,可以加快兼容性调整。

radarnext:基于4D MMWave Imaging Radar
摘要 - 3D对象检测对于自动驾驶(AD)和高级驾驶员辅助系统(ADA)至关重要。但是,大多数3D检测器优先考虑检测准确性,通常会忽略实际应用中的网络推理速度。在本文中,我们提出了基于4D MMWave雷达点云的实时可靠的3D对象检测器RadarNext。它利用可重新参数的神经网络来捕获多尺度功能,降低记忆成本并加速推理。此外,为了突出雷达点云的不规则前景特征并抑制背景混乱,我们提出了一个可变形的可变形前景增强网络(MDFEN),以确保检测准确性,同时小型地牺牲了速度的牺牲和参数的过多。dive viewt和tj4dradset数据集的实验结果验证了Radarnext的出色性能和效率,使用我们提出的MDFEN实现了50.48和32.30映射的变体。值得注意的是,我们的radarnext变体在RTX A4000 GPU上达到了超过67.10 fps的推理速度,而Jetson AGX Orin上的推理速度则达到了28.40 fps。这项研究表明,Radarnext带来了基于4D MMWave雷达的3D感知的新颖有效的范式。索引项 - 4D mmwave雷达; 3D对象检测;基于边缘的感知;轻量级感知模型