XiaoMi-AI文件搜索系统
World File Search SystemOb

女性心血管疾病加入我们的团队以ob/gyn
•薪酬包括一个竞争性法新社,总收入超过30,000美元/月,加上HOCC待命付款以及一部分账单,全职等效。•用于1.0 FTE职位的资源,包括常规或阻止时间和较小程序的门诊护理时间•搬迁援助包括在过渡期内访问补贴住房,以及其他可谈判的激励措施。成功的候选人有望提供全面的社区妇科服务,包括咨询和外科服务。他们还将在协作环境中与包括家庭医生和助产士在内的多学科团队一起在协作环境中工作。按照呼叫要求包括1:3,目的是达到1:6。作为一家大约200个年龄的1B级医院,并经历了同比增长,我们正在扩大团队,以更好地满足社区不断增长的需求。我们的ORS具有良好的妇科手术广度,包括用于晚期腹腔镜手术的设备。除了最新的腹腔镜仪器套件(例如腹腔镜子宫切除术),我们的设备还包括使用肌容瘤。我们的门诊护理配备了包括阴道镜检查在内的全面妇科检查。作为您拥有的理想候选人•加拿大皇家医师和外科医生学院的FRCSC认证在妇产科/妇科学方面•熟练的腹腔镜手术熟练程度是首选,但不需要奖学金。我们欢迎各个阶段的申请人。不需要奖学金•在安大略省(CPSO)执业的许可或资格•良好的常识者加拿大医疗保护协会的会员资格•强大的沟通技巧和富有同情心的患者护理方法我们的医务人员包括住院医师,包括一般外科手术,一般医学,眼科学,眼科 /妇产科 /妇产科学和放射学和放射学和放射学和放射学。我们还拥有大量的巡回外科医生,包括ENT,塑料,骨科和泌尿科。GBGH是一个扩展的113张床设施,包括封闭的单元3级ICU。我们敬业的团队为各种集水区提供服务,包括米德兰,Penetanguishene,Tiny的小镇,Tay乡,克里斯蒂安岛,乔治亚湾镇和Springwater镇。,人口基数为55,000,在高峰季节飙升至150,000多个,GBGH是我们充满活力的社区的医疗基石。沉浸在乔治亚湾的风景秀丽中,非常适合划船,远足和滑雪等户外追求。Midland提供一个家庭友好的环境,拥有顶级学校,安全的社区和充满活力的社区精神,包括法国学校系统的家庭系统。在这里享受平衡的生活,您可以在这里培养一个充实的职业,同时品尝美好的时间,以进行个人兴趣和休闲活动。在GBGH,我们致力于以以人为本的护理为社区提供个性化的,出色的护理。我们致力于适应您的偏好并确保合适的工作与生活平衡。如果您有兴趣,您如何申请?发送到physicianrecruitment@gbgh.on.ca。通过通过电子邮件发送他们的利益信和课程的VITAE来询问这一机会,以引起妇产科负责人Emily Queenan博士的关注。gbgh致力于提供符合安大略省残疾人法(“ AODA”)的可及性的可访问雇用惯例。如果您需要在招聘过程的任何阶段进行残疾的住宿,请告知人力资源部门。我们鼓励所有合格的个人申请,包括可见的少数民族,土著人民,残疾人,2Slgbtqai+人,以及其他将为多样化工作场所做出贡献的人。

多个OB星的定量光谱
上下文。大多数巨星位于二进制或多个恒星系统中。与单颗恒星相比,这些物体基于模型大气对定量分析提出了其他挑战。特别是目前几乎没有有关此类系统化学组成的信息。目标。四个恒星系统HD 37061的成员充满了猎户座中H II区域43的兴奋。首次得出所有可在光谱中可追踪的线的元素的精确和精确的丰度。方法。采用了与A tLAS 12代码与非LTE线形成计算相结合的杂种非本地热力学平衡(非LTE)方法。分析了单个恒星的大气参数和元素丰度的高分辨率复合谱。基本的恒星参数是基于恒星进化轨迹得出的,并表征了星际红色。结果。我们确定了HD 37061系统中三个恒星的基本参数和化学丰度。系统中的第四个和最微弱的恒星由于其快速旋转而没有显示出不同的光谱特征。但是,该恒星对连续体具有明显的影响。单个恒星的派生元素丰度和确定的年龄相互一致,并且丰度与宇宙丰度标准相一致。我们发现光谱距离与Gaia数据释放3个视差距离之间有着极好的一致性。

了解我的产科预付款计划
Novel OBGyn 的医师提供产科护理,根据惯例,该服务在患者护理结束时以“批量”(全球账单)计费,具体为患者分娩后 48 小时内。此“批量”账单不包括怀孕期间常规护理之外的超声波检查或病人就诊。从健康保险方面来看,产科护理根据怀孕期间护理的地点分为两部分:• 前 60% 的护理在 OBGyn 的医疗办公室进行,首先会见以确定/确认怀孕,然后由我们的医师负责正式的第一次产科就诊。初次确认怀孕的就诊以及初次产科就诊通常都由保险承保,需要共付额/共同保险,此外还可能需要单独承担上述就诊期间进行的超声波检查的费用。在提供上述服务之前,这些金额会披露给患者。如果患者从其他医生的办公室转诊,并且收到了适当的医疗记录,则通常无需确认怀孕情况。• 所有后续常规就诊通常都由健康保险全额承保,患者无需承担进一步责任。如果某次就诊被视为“常规”护理之外的就诊(因疾病或患者常规产前检查以外的其他不适而进行的病假就诊),则需要支付共付费用,并且可能需要支付超声波费用,具体取决于健康计划。• 剩余的 40% 在医院医生进行分娩护理时支付。这项服务称为医生分娩费用,是每个保险提供商向我们的医生支付的一笔固定的合同费用,以及他们为提供上述服务向患者收取的费用。该费用与患者的住院费用或医院/机构本身收取的任何费用是分开的。

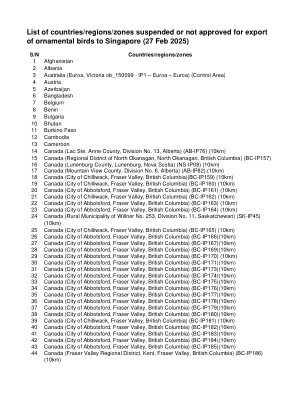
AI或未批准为OB(国家列表)2025.xlsx
s/n国家/地区/区域1阿富汗2阿尔巴尼亚3澳大利亚3(欧洲,维多利亚州OB_150099 -IP1 - IP1 - EUROA - EUROA)(控制区)4奥地利5阿塞比海6孟加拉国6孟加拉国7比利时7比利时8 Benin 9 Benin 9 Benin 9 Bulgaria 10 Bulgaria 10 Bulgaria 10 Bhutan 11 Burkino Fasbodia Fasbodia 12 cambodia 13 cancancancan Anne County,第分部 13,艾伯塔省)(AB-IP76)(10公里)15加拿大(不列颠哥伦比亚省北俄克拉省北部地区区域区)(BC-IP157)16加拿大(伦嫩堡,伦嫩堡,伦嫩堡,新斯科省,斯科特亚)(Nova Scotia) 6,艾伯塔省)(AB-IP82)(10公里)18加拿大(奇利瓦克市,弗雷泽河谷,不列颠哥伦比亚省弗雷泽河谷)(BC-IP159)(10km)(10km)(10km)(加拿大(加拿大)(奇利瓦克市,弗雷泽谷,不列颠哥伦比亚省弗雷泽谷,不列颠哥伦比亚省)(BC-IP160)(BC-IP160)(10km)COLLEE(BRINFERAUMB valley) (BC-IP161) (10km) 21 Canada (City of Chilliwack, Fraser Valley, British Columbia) (BC-IP162) (10km) 22 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP163) (10km) 23 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP164) (10公里)加拿大24(威尔纳的农村城市 253,第253师Anne County,第分部 13,艾伯塔省)(AB-IP76)(10公里)15加拿大(不列颠哥伦比亚省北俄克拉省北部地区区域区)(BC-IP157)16加拿大(伦嫩堡,伦嫩堡,伦嫩堡,新斯科省,斯科特亚)(Nova Scotia) 6,艾伯塔省)(AB-IP82)(10公里)18加拿大(奇利瓦克市,弗雷泽河谷,不列颠哥伦比亚省弗雷泽河谷)(BC-IP159)(10km)(10km)(10km)(加拿大(加拿大)(奇利瓦克市,弗雷泽谷,不列颠哥伦比亚省弗雷泽谷,不列颠哥伦比亚省)(BC-IP160)(BC-IP160)(10km)COLLEE(BRINFERAUMB valley) (BC-IP161) (10km) 21 Canada (City of Chilliwack, Fraser Valley, British Columbia) (BC-IP162) (10km) 22 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP163) (10km) 23 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP164) (10公里)加拿大24(威尔纳的农村城市 253,第253师Anne County,第13,艾伯塔省)(AB-IP76)(10公里)15加拿大(不列颠哥伦比亚省北俄克拉省北部地区区域区)(BC-IP157)16加拿大(伦嫩堡,伦嫩堡,伦嫩堡,新斯科省,斯科特亚)(Nova Scotia) 6,艾伯塔省)(AB-IP82)(10公里)18加拿大(奇利瓦克市,弗雷泽河谷,不列颠哥伦比亚省弗雷泽河谷)(BC-IP159)(10km)(10km)(10km)(加拿大(加拿大)(奇利瓦克市,弗雷泽谷,不列颠哥伦比亚省弗雷泽谷,不列颠哥伦比亚省)(BC-IP160)(BC-IP160)(10km)COLLEE(BRINFERAUMB valley) (BC-IP161) (10km) 21 Canada (City of Chilliwack, Fraser Valley, British Columbia) (BC-IP162) (10km) 22 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP163) (10km) 23 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP164) (10公里)加拿大24(威尔纳的农村城市 253,第253师13,艾伯塔省)(AB-IP76)(10公里)15加拿大(不列颠哥伦比亚省北俄克拉省北部地区区域区)(BC-IP157)16加拿大(伦嫩堡,伦嫩堡,伦嫩堡,新斯科省,斯科特亚)(Nova Scotia)6,艾伯塔省)(AB-IP82)(10公里)18加拿大(奇利瓦克市,弗雷泽河谷,不列颠哥伦比亚省弗雷泽河谷)(BC-IP159)(10km)(10km)(10km)(加拿大(加拿大)(奇利瓦克市,弗雷泽谷,不列颠哥伦比亚省弗雷泽谷,不列颠哥伦比亚省)(BC-IP160)(BC-IP160)(10km)COLLEE(BRINFERAUMB valley) (BC-IP161) (10km) 21 Canada (City of Chilliwack, Fraser Valley, British Columbia) (BC-IP162) (10km) 22 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP163) (10km) 23 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP164) (10公里)加拿大24(威尔纳的农村城市253,第253师253,第253师11, Saskatchewan) (SK-IP45) (10km) 25 Canada (City of Chilliwack, Fraser Valley, British Columbia) (BC-IP165) (10km) 26 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP166)(10km) 27 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP167)(10公里)28加拿大(不列颠哥伦比亚省弗雷泽河谷,阿伯茨福德市)(BC-IP169)(10公里)(10km)(10km)(10 km)29加拿大(阿伯茨福德市,弗雷泽河谷,不列颠哥伦比亚省弗雷泽河谷) (BC-IP171)(10km) 31 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP173)(10km) 32 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP174)(10km) 33 Canada (City of Abbotsford, Fraser Valley, British Columbia) (BC-IP175)(10km)34加拿大(不列颠哥伦比亚省弗雷泽河谷,阿伯茨福德市)(BC-IP176)(10公里)(10km)(10km)(10 km)35加拿大(阿伯特福德市,弗雷泽河谷,不列颠哥伦比亚省弗雷泽河谷,不列颠哥伦比亚省) (BC-IP178)(10公里)37加拿大(不列颠哥伦比亚省弗雷泽河谷,阿伯茨福德市)(BC-IP179)(10公里)(10公里)(10公里)(10公里)38加拿大(阿伯特福德市,弗雷泽河谷,不列颠哥伦比亚省弗雷泽谷,不列颠哥伦比亚省) (10公里)40加拿大(不列颠哥伦比亚省弗雷泽山谷,艾伯特福德市)(BC-IP182)(10公里)(10公里)加拿大41加拿大(不列颠哥伦比亚省弗雷泽谷,阿伯斯福德市(BC-IP183)(10km)(10km)(10km)(10km)加拿大42加拿大(加拿大,阿布斯福德,弗拉斯福尔,哥伦比亚省,43)不列颠哥伦比亚省弗雷泽山谷的Abbotsford(BC-IP185)(10公里)(10公里)44加拿大(不列颠哥伦比亚省弗雷泽谷肯特郡弗雷泽山谷地区区)(BC-IP186)(10km)(10km)
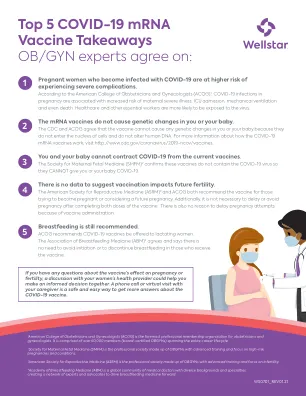
前5名COVID-19-mRNA疫苗收获OB/GYN专家...
2母胎胎医学协会(SMFM)是由经过高级培训的OBGYN组成的专业社会,专注于高风险的怀孕和状况。3美国生殖医学学会(ASRM)是由经过高级培训和专注于不孕症的OBGYN组成的专业学会。4母乳喂养医学学院(ABM)是一个全球的医生社区,具有不同背景和专业的医生社区,创建了专家和倡导者网络,以推动母乳喂养医学前进。
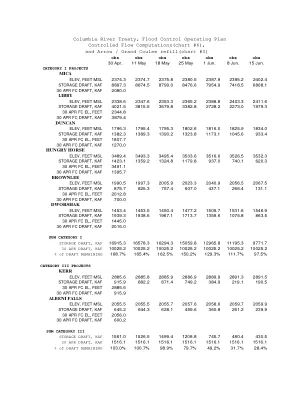
哥伦比亚河条约,洪水控制操作计划控制流量计算(图6)和箭头 /大库利补充(图#3)obs ob ob ob ob ob ob obs < / div < / div>
图表#3和#6哥伦比亚河条约洪水控制操作计划(FCOP)除了每天对流量和储层调节的模拟外,还将用作操作指南,以确定IV类储层类别的俄勒冈州达勒斯的受控流量。受控流量是哥伦比亚河下河洪水控制的达勒斯的目标流。

原创文章 抗肿瘤坏死因子药物、具有替代作用模式的生物制剂和托法替尼在 ob 中的比较效果
摘要 背景 多种生物和靶向合成的改善病情的风湿药物 (b/tsDMARDs) 被批准用于治疗类风湿关节炎 (RA),包括 TNF 抑制剂 (TNFi)、具有其他作用模式的 bDMARDs (bDMARD-OMA) 和 Janus 激酶抑制剂 (JAKi)。建议将 b/tsDMARDs 与传统合成 DMARDs (csDMARDs) 联合使用,但单一疗法在实践中很常见。 目的 比较三种 RA 替代治疗方法的药物维持和临床效果。 方法 这项观察性队列研究嵌套在瑞士 RA 登记处内。包括成年 RA 患者开始使用的 TNFi、bDMARD-OMA(阿巴西普或抗 IL6 药物)或 JAKi 托法替尼 (Tofa)。主要结果是总体药物保留率。我们进一步分析了次要有效性结果以及同时使用的 csDMARDs 是否改变了有效性,并调整了潜在的混杂因素。结果 共纳入 2600 名患者的 4023 个疗程,其中 1862 名接受 TNFi 治疗,1355 名接受 bDMARD-OMA 治疗,806 名接受 Tofa 治疗。TNFi 更常用作第一种 b/tsDMARD,且患者年龄更小,病程更短。TNFi 的总体药物维持费用显著低于 Tofa [HR 1.29(95% CI 1.14 至 1.47)],但 bDMARD-OMA 和 Tofa 的总体药物维持费用相似 [HR 1.09(95% CI 0.96 至 1.24)]。未同时使用 csDMARD 时,TNFi 维持费用降低 [HR:1.27(95% CI 1.08 至 1.49)],而 bDMARD-OMA 或 Tofa 的维持费用与同时使用 csDMARD 相比无差异。结论 Tofa 药物维持治疗与 bDMARDs-OMA 相当,略高于 TNFi。同时使用 csDMARD 似乎是 TNFi 达到最佳疗效的必要条件,但 bDMARD-OMA 或 Tofa 则不需要。
女性心血管疾病 加入我们的团队以ob/gyn
这是妮可,她和丈夫和两个孩子一起住在新斯科舍省。她意外地失去了姐姐,没有任何警告,她的妹妹25岁。六个月后,妮可(Nicole)在30岁时就患有她的第一次心脏病发作,这是一个ntemi,需要一个支架。她怀有儿子,另一个nstemi时患有第二次心脏病发作,她今年34岁。妮可说,她亲眼目睹了女性心脏健康的各个护理和预防的不平等现象,并且已经成为女性心脏健康的强有力的拥护者。

10/28/23njm ANMC OB/GYN服务糖尿病糖尿病在怀孕筛查和管理指南I.介绍过去2代糖尿病
10/28/23nJM ANMC OB/GYN服务糖尿病妊娠筛查和管理指南I.在过去2代糖尿病中的引言中,阿拉斯加原住民的糖尿病已显着增加。糖尿病可能与怀孕患者和她后代的发病率和死亡率有关。怀孕期间糖尿病的管理提供了一个独特的机会,可以积极影响两位患者的生活。随着高血糖和不良怀孕结局(HAPO)研究以及随后的国际糖尿病和妊娠研究组协会(IADPSG)诊断标准,我们现在已经随机控制数据以指导管理。在等待其他国家基准建议的同时,阿拉斯加地区与国家印度卫生糖尿病计划合作提出了以下准则。II。 筛查和诊断程序A. 妊娠前糖尿病患者不需要妊娠糖尿病检查。 直接进入管理计划。 不要执行葡萄糖挑战测试或进一步筛查。 B. 如果患者不耐受标准葡萄糖溶液,则有几种替代方式。 (附录A)C。初始阶段:筛查明显的糖尿病,所有患者均应在初次访问时进行筛查,以排除表1中列出的美国糖尿病协会(ADA)标准所定义的明显糖尿病。 如果患者不禁食,则获得这些:HGB A1C随机血浆如果患者禁食,请获得这些:II。筛查和诊断程序A.妊娠前糖尿病患者不需要妊娠糖尿病检查。直接进入管理计划。不要执行葡萄糖挑战测试或进一步筛查。B.如果患者不耐受标准葡萄糖溶液,则有几种替代方式。(附录A)C。初始阶段:筛查明显的糖尿病,所有患者均应在初次访问时进行筛查,以排除表1中列出的美国糖尿病协会(ADA)标准所定义的明显糖尿病。如果患者不禁食,则获得这些:HGB A1C随机血浆如果患者禁食,请获得这些: