XiaoMi-AI文件搜索系统
World File Search SystemOperation

实现微电子操作的方法...
引言 在独立国家联合体 (CIS) 国家和乌兹别克斯坦共和国的铁路上,微处理器的使用进程正在加速。节能机电继电器的产量正在减少,这些继电器占乌兹别克斯坦捷米尔尤拉里股份公司 (JSC)“UTY”铁路自动化和远程机械现有设备的 80%。为了解决向微电子的过渡,多年来一直在研究这个问题。例如,JSC“UTY”正在铁路上引入一种新的基于微处理器的电力集中系统,一个新车站和位于高速旅客列车运行区段的车站。根据车站单线程计划的拓扑结构,通过聚合块和执行块的相互连接,根据地理原理编制具有所需箭头数的车站的 Ilock 路线继电器集中 (BRRC) 方案。在电路准备中应用这一原理大大简化了系统的维护和故障排除。微处理器系统尽管具有强大的辅助功能,但不具备这一原理,因此维护和故障排除变得更加复杂。使用此类系统的经验证实了这一点。在保修服务期间,设备制造商负责故障排除、更换故障模块和块以及软件问题。然而,保修期过后,这些问题仍然作为经济问题落在铁路的肩上。在微处理器系统中,更改站点配置是一个特殊问题,需要重新编程 CPU。在基于微处理器的电气集中系统中,软件占其体积的 80%。因此,从经济角度来看,对配备基于微处理器的电气集中的车站配置的任何更改都相当于构建一个新系统。

年度报告2023-24
通信托管服务由与客户的运营和维护(O&M)团队合作提供的顾问提供。托管服务团队由具有高技能的工程师组成,在Oracle Communications产品方面具有深厚的知识和专业知识。针对行业的客户解决方案 - 通信托管服务的计数,具有明确的管理模型,在该模型中,熟练的前端和后端顾问组由服务交付经理(SDM)精心策划。托管服务团队代表您与Oracle全球支持和工程小组联系,根据先前与您同意24x7援助的服务水平的要求。在“通信托管服务框架”中,基于ITIL和敏捷,客户通过相关的服务工作流渠道(即票务工具,邮件列表)和交互式语音响应(IVR)系统提高了需求。行业的客户解决方案 - 通信已经开发了一种顶级工具来集中,自动化和简化操作和维护。此工具称为Oracle Service操作门户,允许您将操作提高到更高的操作水平。

了解 VRAM 和 SGRAM 操作
本文档可能包含初步信息,IBM 可能会随时更改,恕不另行通知。IBM 对本文所含信息的任何使用不承担任何责任。本文档中的任何内容均不构成 IBM 或第三方知识产权的明示或暗示许可或赔偿。本文档中描述的产品不适用于植入或其他直接生命支持应用,这些应用的故障可能会导致直接的身体伤害或人身伤害。本文档不提供任何形式的保证,包括但不限于适销性或针对特定用途的适用性的暗示保证。

弹性设计和操作策略...
独立于地球的永久性外星栖息地系统必须在持续的破坏性条件下、地球支持极其有限和无人驾驶时间延长的情况下按预期运行。设计满足极端环境(例如剧烈的温度波动、银河宇宙射线、破坏性尘埃、流星体撞击(直接或间接)、振动和太阳粒子事件)对长期深空栖息地的要求是这项工作中最大的挑战之一。这种背景要求我们必须建立专门知识和技术来构建具有弹性的栖息地系统。弹性不仅仅是稳健性或冗余性:它是一种系统属性,它通过设计选择和维护过程来考虑预期和意外的干扰,并在运行中适应它们。我们目前缺乏在栖息地系统中实现高水平弹性所需的框架和技术。弹性外星栖息地研究所 (RETH i) 的使命是利用现有的新技术提供态势感知和自主性,从而设计出能够适应、吸收和快速恢复预期和意外中断的栖息地。我们正在建立完全虚拟和耦合的物理虚拟模拟功能,这将使我们能够探索各种潜在的深空智能栖息地配置和操作模式。
CMT216XA RFPDK操作指南
9。Contacts ...................................................................................................................................................30

微电网设计和运行平台
环境考虑和对基础设施敏感性的日益认识导致人们重新考虑如何最好地配置能源系统。目前为大型生产单位(如核电厂和化石燃料发电厂)开发的高度集中式系统不适用于风能和太阳能等可再生、间歇性和分布式能源(Fathima 和 Palanisamy,2015 年)。这促使人们使用微电网,微电网是专门为这种异质能源生产而开发的。微电网是一组相互连接的能源、负载和存储设备,既可以与周围电网连接运行,也可以在孤岛模式下断开连接。它有可能以低成本和减少环境影响的方式提供更高的自给自足性和可靠性(Eto 等人,2018 年)。微电网通常包括较小的生产单位,如光伏阵列、风力涡轮机、微型涡轮机和发电机(内燃机)以及飞轮和电池等存储设备。它们的投资成本相对较低,因此
铣床操作 - engr.hk
铣削是使用多齿切削刀具(称为铣刀,切削刃称为齿)来产生平面和复杂形状的过程。与已有数千年历史的车床不同,铣床的历史还不到两百年。由于它们需要比手动车床多得多的功率,因此它们的引入必须等待工业水力和蒸汽动力的发明。此外,必须首先提供所有机械部件,例如精确配合的滑轨、抵抗切削力的大型铸件、校准的丝杠和硬化钢切削工具。伊莱·惠特尼 (Eli Whitney) 于 1818 年左右发明了第一台铣床,但约瑟夫·A·布朗(后来加入布朗和夏普)的万能铣床的膝部和立柱支撑装置可追溯到 1862 年,标志着机器发展的重要一步。在十九世纪下半叶,铣床逐渐取代了刨床和刨刨机,后者具有车床式的单点刀头,可在工件上直线移动,每次刮削金属。铣床具有连续切削功能,不仅比刨床和刨刨机更快地去除金属,而且还可执行其他操作,例如切割齿轮和麻花钻的螺旋线。如今,铣床的数量远远超过刨床和刨刨机。新英格兰和后来中西部的美国人不断添加功能,最终形成了现代铣床。
铣床操作 - engr.hk
铣削是使用多齿切削刀具(称为铣刀,切削刃称为齿)来生产平面和复杂形状的过程。与已有数千年历史的车床不同,铣床的历史还不到两百年。由于它们需要比手动车床多得多的功率,因此它们的引入必须等待工业水和蒸汽动力的发明。此外,必须首先提供所有机械部件,例如精确安装的滑轨、抵抗切削力的大型铸件、校准的丝杠和硬化钢切削工具。伊莱·惠特尼 (Eli Whitney) 于 1818 年左右发明了第一台铣床,但约瑟夫·A·惠特尼 (Joseph A. Whitney) 的万能铣床采用了膝部和立柱支撑结构。布朗 (Brown)(后来加入布朗和夏普公司)的发明可追溯到 1862 年,标志着机器发展的重要一步。在十九世纪下半叶,铣床逐渐取代了刨床和刨床,后者具有车床型单点刀头,可在工件上直线移动,一次刮掉金属。铣床具有连续切削作用,不仅比刨床和刨床更快地去除金属,还可以执行其他操作,例如切割齿轮和麻花钻的螺旋线。如今,铣床的数量远远超过刨床和刨床。新英格兰和后来中西部的美国人不断添加功能,最终发明了现代铣床。
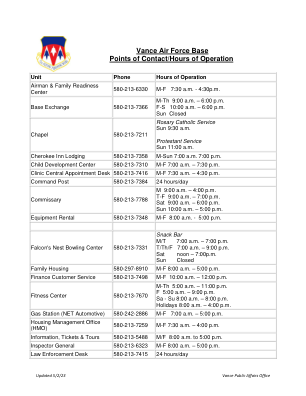
联系点 营业时间 ...
周一至周四 上午 5:00 – 晚上 11:00 周五 上午 5:00 – 晚上 9:00 周六至周日 上午 8:00 – 晚上 8:00 节假日 上午 8:00 – 下午 4:00

甲基化操作向导(Meow)
图1。Meow在长阅读测序数据中识别差异甲基化区域。A. Meow需要一组带有填充的MM和ML标签的对齐的BAM文件以及包含感兴趣区域列表的床文件,例如CPG岛,以构建参考数据库。在构建参考数据库后,可以在参考队列中执行一项输出分析,以识别该数据集中的唯一差异甲基化区域(DMR)。也可以使用已经构建的参考数据库来识别DMR的测试样本运行。两种方法的输出都在表或图形格式中获得。B.与已知具有Prader-Willi综合征的测试样品相比,与19个随机样品的对照数据库相比,显示了已知具有Prader-Willi综合征的测试样品的显着差异甲基化的位点(红色),该数据库是1000个基因组项目ONT测序联盟的一部分。C. Meow生成图形,说明了测试样品和对照数据集之间甲基化频率的显着差异。所示的五个DMR表示(b)中的显着值。D.色带图显示了查询中每个C和G的甲基化频率,相对于控制数据库甲基化频率在同一位置的平均值和标准误差。