XiaoMi-AI文件搜索系统
World File Search SystemPedal
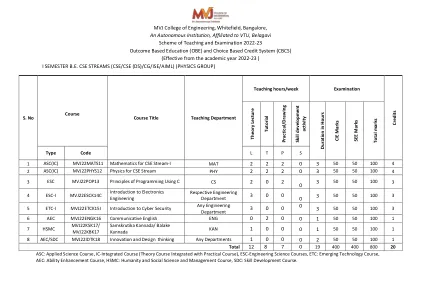
物理循环-CSE-stream-2022-scheme.pdf
•熟悉与一个变量相关的微积分的重要性,并且在计算机科学和工程方面可进行多变量。•通过应用普通微分方程来分析计算机科学和工程问题。•将模块化算术知识应用于计算机算法。•发展线性代数的知识以求解方程系统。模块1 L1,L2和L3 8小时与计算机科学和工程有关的极性坐标和曲率简介。极坐标,极曲线,半径矢量与切线之间的角度以及两条曲线之间的角度。踏板方程。曲率和曲率半径 - 笛卡尔,参数,极性和踏板形式。问题。自学:曲率的中心和圆圈,进化和灭绝。应用:结构设计和路径,材料强度,弹性。模块-2 L1,L2和L3 8小时串联扩展和部分分化的介绍计算机科学领域和
电子自行车信息指南
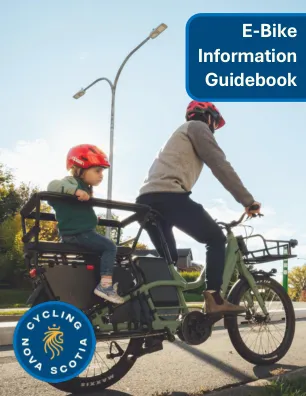
分类系统《新斯科舍省汽车法案》允许进行两种公认的电子自行车分类,这些分类不需要额外的许可才能在2025年1月在新斯科舍省运行。1级:1类电子骑行的操作非常类似于典型的自行车,但具有启动以帮助骑手的电动机。它们仅是踏板的辅助,要求骑手踏板以使电动机启动,因为他们缺乏油门。1类电子自行车限于500W电动机最大,并以32 km/h(20 mph)的限制。达到此速度后,电辅助将切出。骑手仍然能够超过此速度,但是在没有电动机的帮助的情况下,它必须处于自己的力量之下。大多数生产电子自行车的主要自行车品牌(跋涉,巨人,专业等)将生产1类电子自行车,因为与以下概述的2类电子自行车相比,它更紧密地模仿了规则的,无助的循环。第2类:2级电子骑行是在新斯科舍省被认为是街道合法的第二个公认的E型自行车分类,而无需额外的许可。2级电子摩托车具有1类1的所有相同限制和要求,但除了踏板辅助外,除了2级电子自行车具有油门(通常连接到车把上)(通常连接到车把上),这允许电动机操作,而无需骑手可以踩踏车。您会从较小的制造商那里找到2级电子自行车,这些型号倾向于专注于电子自行车的生产,因此,它们通常会具有较低的起点。某些2类电子骑行的设计看起来更像是摩托车/踏板车;但是,许多人仍然看起来像典型的自行车,车把上的拇指油门。

通过感官反馈预防模式错误
摘要 研究了使用不同类型的反馈来预防模式错误。两个实验检查了文本编辑任务中模式错误的频率,其中模式错误被定义为在插入模式下尝试发出导航命令,或在命令模式下尝试插入文本。在实验 1 中,在四种不同条件下比较了动觉反馈与视觉反馈的有效性:使用键盘还是脚踏板来改变模式(动觉反馈),交叉存在或不存在视觉反馈来指示模式。结果表明,动觉反馈和视觉反馈在减少模式错误方面都是有效的。但是,无论是在减少错误方面还是在减少与模式变化相关的认知负荷方面,动觉反馈都比视觉反馈更有效。实验 2 测试了以下假设:这种动觉反馈的优越性是由于脚踏板需要受试者主动保持插入模式。结果证实,使用非锁定脚踏板切换模式比使用锁定踏板提供了更显著的模式状态信息来源。根据这些结果,我们认为用户维护的模式状态比系统维护的模式状态更有效地防止模式错误。

动力传动系统 HIL 测试的关键考虑因素
名称 类型和测试仪信号 方向 说明 加速踏板位置 (APP) 模拟输出 驾驶员脚踏板 气流 模拟/数字输出(取决于传感器类型) 测量进入发动机的空气质量 进气歧管压力 (IMP) 模拟输出 影响空气密度 进气歧管温度 (IMT) 模拟输出 影响空气密度 燃油压力 模拟输出 影响喷油器每次启动时分配的燃油 曲轴 模拟/数字输出(取决于传感器类型) 高速信号;旋转位置信息 凸轮 模拟/数字输出(取决于传感器类型) 高速信号;旋转位置信息 Lambda/O2 模拟输出 排气化学反馈 爆震 模拟输出 高速信号;气缸振动反馈 节气门位置 模拟输出 节气门体反馈 节气门指令 数字 PWM 输入 ECU 的节气门设定点
动力传动系统 HIL 测试的关键考虑因素
名称 类型和测试仪信号 方向 说明 加速踏板位置 (APP) 模拟输出 驾驶员脚踏板 气流 模拟/数字输出(取决于传感器类型) 测量进入发动机的空气质量 进气歧管压力 (IMP) 模拟输出 影响空气密度 进气歧管温度 (IMT) 模拟输出 影响空气密度 燃油压力 模拟输出 影响喷油器每次启动时分配的燃油 曲轴 模拟/数字输出(取决于传感器类型) 高速信号;旋转位置信息 凸轮 模拟/数字输出(取决于传感器类型) 高速信号;旋转位置信息 Lambda/O2 模拟输出 排气化学反馈 爆震 模拟输出 高速信号;气缸振动反馈 节气门位置 模拟输出 节气门体反馈 节气门指令 数字 PWM 输入 ECU 的节气门设定点
传感器
Piher 的位置传感器和控制器广泛应用于陆地车辆市场。汽车市场是 Piher 成功的关键驱动因素之一。逐年要求新的、具有成本效益的想法,使公司形成了今天的面貌:积极主动和以客户为导向。自 70 年代以来,Piher 一直为美国和欧洲的主要汽车 OEM 和零部件供应商提供服务,并在提供当今汽车领域无与伦比的定制控制和传感器解决方案方面积累了专业知识。得益于传感器,汽车变得越来越“智能”、更高效、更安全,而我们随时为您提供帮助!Piher 传感器和控制器的典型应用包括:• 加热、通风 + 空调 • 仪表板灯调光器 / 前照灯调平 / 前照灯开关 + 内部灯光控制 • 后视镜记忆 • 信息娱乐 • 挡风玻璃雨刷 • 停车雷达 / 敞篷车盖控制 • 座椅位置 • 电动天窗 • 变速箱控制 • 安全气囊开关 • 动力传动系统 • 后备箱 / 行李箱位置 • 涡流执行器 • 座椅温度控制 • 转速计数器 • 制动踏板位置传感器 • 油门踏板位置传感器 • 动力转向 • 离合器踏板位置传感器 • 油门 / EGR 阀和齿轮位置传感器 • 电机轴位置传感器 • 高度和悬架传感器 • 电机轴位置传感器 • 电机 / 运动控制(闭环反馈)
EF2000 飞行控制计算机的软件开发
空气数据传感器 航空电子系统 交叉通道数据链 数字发动机控制单元 飞行控制计算机 飞行控制系统 惯性测量单元 踏板传感器单元 操纵杆传感器和接口控制组件 公用控制系统

神经认知测试电池1634培训视频后测名称:电话号码:
5。以下HVLT-R延迟识别的分数(第C部分)为:延迟识别y n y n y n y n n√头盔√√英雄√cap√cap√temp√temp√√temp√temp√rack√xrack√xttwig√t提取twig√√ √杯√行李√棒球。

ebike Systems
在每种骑行场景中,Yamaha的调整知识 - 如何监视骑行条件,并且算法自动选择适当的踏板辅助水平。结果是一个微调的,用户友好的骑行。这些算法都是针对阵容中每个驱动器单元单独创建的,从而为每种骑行情况创造了预期的体验。如果您希望手动在辅助模式之间移动,则可以关闭自动支持模式。所有驱动器单元模型中可用的功能。