XiaoMi-AI文件搜索系统
World File Search SystemPing

使用所有Bio- ...
本期刊文章的自构建后版本可在Linköping大学机构存储库(DIVA)上获得:http://urn.kb.se/resolve?urn= urn= urn= urnt:nbn:se:se:se:liu:diva-184697 N.B. N.B. N.B.:引用这项工作时,请引用原始出版物。Bamgbopa,M。O.,Fetyan,A.,Vagin,M.,Adelodun,A。A.,(2022),朝着所有生物源性电池组件的生态友好的氧化还原流量电池,储能杂志,50,104352。https://doi.org/10.1016/j.est.2022.1022.104352

使用所有Bio- ...
本期刊文章的自构建后版本可在Linköping大学机构存储库(DIVA)上获得:http://urn.kb.se/resolve?urn= urn= urn= urnt:nbn:se:se:se:liu:diva-184697 N.B. N.B. N.B.:引用这项工作时,请引用原始出版物。Bamgbopa,M。O.,Fetyan,A.,Vagin,M.,Adelodun,A。A.,(2022),朝着所有生物源性电池组件的生态友好的氧化还原流量电池,储能杂志,50,104352。https://doi.org/10.1016/j.est.2022.1022.104352

在CNS血管内皮细胞上表达的 IL-6R有助于小鼠实验性自身免疫性脑脊髓炎的发展 基于深度学习的光流有多好? 具有单眼大满贯的基于学习的深度深度估计模型 评估波士顿动力学的选定本地化和映射技术 主论文:温室能量平衡 用聚合物混合离子... 检测冰形成 基于自主地面车辆的基于增强学习的运动计划 深度回归的不确定性定量指标
本期刊文章的自构建后版本可在Linköping大学机构存储库(DIVA)上获得:http://urn.kb.se/resolve?urn= urn= urn= urn= urnt:nbn:se:se:liu:diva-165639 N.B. N.B. N.B.:引用这项工作时,请引用原始出版物。Petkovic,F.,Lazzarino,G.,Engblom,D.,Blomqvist,A。,A。,(2020),IL-6R,IL-6R在CNS血管内皮细胞上表达,有助于在小鼠中开发实验性自身免疫性脑膜炎,杂志Neurommommomyologology of MICE,342,57777777777777777777777777777777777777777777777777777.777777777777777777777777777777777年。 https://doi.org/10.1016/j.jneuroim.2020.577211

复杂环境下不规则声呐浮标模式的设计和性能 Donald R. DelBalzo Kevin C. Stangl 技术解决方案集团 OPNAV N874 QinetiQ 北美 NC1/Suite 1200 40201 Hwy 190 E 2000 海军五角大楼 Slidell, LA 70461 华盛顿特区 20350-2000
摘要 - 冷战期间开发了用于深而均匀的海底环境的最佳单基地声纳浮标场模式,其中可以使用简单的中值检测范围来定义声纳浮标之间有用的固定间距。然而,当前经常进行作战的沿海环境中的海洋和声学条件非常复杂和动态,以至于空间和时间的变化破坏了与传统战术搜索概念相关的同质假设。已经开展了几项研究工作来设计更好的被动和单基地主动声纳浮标位置,但其中大多数是评估算法,而不是真正的规划算法。一种不同的算法方法已成功开发并最初应用于单基地移动传感器,该方法从一组随机的传感器位置开始,然后使用遗传算法找到接近最优的解决方案。遗传算法解决方案是非标准搜索路径,可适应复杂的海洋学、可变的底部特性和假定的目标战术 [DP Kierstead 和 DR DelBalzo,军事作战研究杂志(2003 年 3 月/4 月)]。随后开发了一种新功能,用于优化复杂沿海环境中多基地主动声纳浮标的位置(纬度、经度和深度)和 ping 时间。这些算法称为 SCOUT(传感器协调以实现最佳利用和战术)。SCOUT 对移动传感器遗传算法方法进行了两项重大修改,以考虑双基地和多基地声纳浮标领域,其中每个接收器都能够观察来自每个来源的数据。第一个是结构上的修改,引入了一条新染色体来描述战术计划。它为每个声纳浮标提供一个基因,由一个位置、一个有序的部署序列和一组 ping 时间组成。新染色体中的位置和时间独立变异,并以不规则模式和非连续 ping 序列为特征。第二个修改是在检测建模方面,引入了一种新的双基地检测模型。它允许结合相干和非相干处理。对于这项工作,我们假设可以同时监控所有声纳浮标。SCOUT 算法是我们之前的遗传算法工作的扩展,据我们所知,它们代表了唯一从头开始设计复杂环境中多静态主动声纳浮标位置的解决方案,而不是推荐一般的努力分配或简单地评估具有不同参数的标准模式。本文讨论了新的染色体结构和现实环境中的模拟结果。结果表明:a) SCOUT 可以有效地使多静态传感器场适应
不规则声呐浮标模式的设计和性能...
摘要 - 冷战期间开发了最佳单基地声纳浮标场模式,用于深而均匀的海底环境,其中简单的中值检测范围可用于定义声纳浮标之间有用的固定间距。然而,当前经常进行作战的沿海环境中的海洋和声学条件非常复杂且动态,以至于空间和时间的变化破坏了与传统战术搜索概念相关的同质假设。已经开展了多项研究工作来设计更好的被动和单基地主动声纳浮标位置,但其中大多数是评估算法,而不是真正的规划算法。一种不同的算法方法已成功开发并最初应用于单基地移动传感器,该方法从一组随机的传感器位置开始,然后使用遗传算法找到近似最优解。遗传算法解决方案是非标准搜索路径,可适应复杂的海洋学、可变的底部特性和假定的目标战术 [D.P.Kierstead 和 D.R.DelBalzo,《军事运筹学杂志》(2003 年 3 月/4 月)]。随后开发了一种新功能,用于优化复杂沿海环境中多静态主动声纳浮标的位置(纬度、经度和深度)和 ping 时间。这些算法称为 SCOUT(传感器协调以实现最佳利用和战术)。SCOUT 包含对移动传感器遗传算法方法的两项重大修改,以解释双静态和多静态声纳浮标场,其中每个接收器都能够观察来自每个源的数据。第一个修改是在结构上,引入了一个新的染色体来描述战术计划。每个声纳浮标都有一个基因,由一个位置、一个有序的部署序列和一组 ping 时间组成。新染色体中的位置和时间独立变异,并以不规则的模式和非连续的 ping 序列为特征。第二个修改是在检测建模上,引入了一种新的双基地检测模型。它允许相干和非相干处理的组合。对于这项工作,我们假设可以同时监控所有声纳浮标。本文讨论了现实环境中的新染色体结构和模拟结果。结果表明:a) SCOUT 可以有效地将多基地传感器场适应SCOUT 算法是我们之前的遗传算法工作的扩展,据我们所知,它们是唯一从头开始设计复杂环境中多静态主动声纳浮标位置的解决方案,而不是推荐一般的努力分配或简单地评估具有不同参数的标准模式。

AntoninoMalacrinò
获得2022 - 今天。研究(RTD-B)。卡拉布里亚大学研究(意大利)Gens 2022 - 套装2022。研究人员。卡拉布里亚大学研究研究(意大利)MAG 2021 - 标志2021。初级小组负责人。芒斯特大学(德国屁股)Gen 2019 - 2021年3月。<2>研究人员研究人员。俄亥俄州立大学(俄亥俄州哥伦布,俄亥俄州)GEN 2017 - 索赔2018。研究如下。LinköpingUniversity(Linköping,瑞典)DICS 2015 - AGO2016。科学家来访。James Hutton Institute(So,So,英国苏格兰)申请2016 - DIC2016。研究人员。卡拉布里亚大学研究研究(意大利)学员,2014年3月 - 2016年3月。研究人员。卡拉布里亚大学研究(意大利)Gen 2014 - 2014年3月。研究老板。卡拉布里亚大学(意大利)
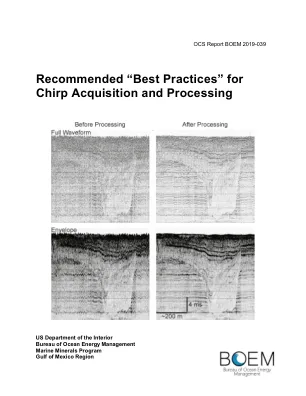
推荐CHIRP获取和处理的“最佳实践”
chirp声音反射系统,有时称为子底剖面,是对海底或湖床下沉积物的超高分辨率(〜十分尺度)成像的宝贵工具。chirp是一种由雷达社区开发的信号处理技术,用于改善回声回报的分辨率(Klauder等,1960)。该技术后来由声纳社区改编(Schock等,1989)。CHIRP信号是一种扫描的频率脉冲,通常在5-30毫秒(MS)之间,其频率在0.5 kHz到24 kHz之间,具体取决于传感器。CHIRP信号处理的基本特征是匹配过滤器(即应用反向卷积),带有已知的即将脉冲函数的返回信号,从理论上讲,该信号将从较长且复杂的声纳脉冲中崩溃,从近距离突击的响应中崩溃。chirp数据是在及时获得的,其中z轴是从chirp到反射器(具有声音响应的海底或更深层的层)的行程,然后返回chirp(双向时间或TWT)。一些CHIRP采集系统会根据水中假定的声速自动显示具有深度Z轴的数据(例如,每秒1500米);但是,记录的数据始终在TWT中。 水平轴是基于每个声纳ping的GPS导航,将其转换为沿调查轨道的距离。每秒1500米);但是,记录的数据始终在TWT中。水平轴是基于每个声纳ping的GPS导航,将其转换为沿调查轨道的距离。
飞机系统建模 - DiVA 门户
本论文中介绍的工作是在瑞典林雪平大学 (LiU) 管理与工程系 (IEI) 的机械设计系进行的。我要感谢几位在工作期间给予我支持和建议的人;首先,我要感谢我的导师 Petter Krus 教授的指导和支持。这段时间最有趣和最令人鼓舞的工作是我们进行 ModuLiTH(模块化电动汽车)项目课程的时候。我要感谢我在萨博航空系统的工业赞助商和主管:Anders Pettersson 提出了启动研究项目的想法,Stefan Andersson 让我深入参与了萨博航空系统的 MBSE 计划,以及 Erik Herzog 的学术观点和在 SPEEDS 项目中一起度过的有趣时光。在林雪平大学机械设计系,我还要感谢 Olof Johansson 对 NFFP 项目的支持和合作,以及 Björn Lundén 对研究生阶段研究和学习的介绍。我要感谢几位在萨博航空系统公司和机械设计部门的 MBSE 领域进行论文、演示和讨论的愉快团队合作,其中我想提到的有:Bengt-Göran Sundqvist、Johan Ölvander、Anders Weitman、Sören Steinkellner、Hampus Gavel、Gert Johansson、Lars Karlsson、Ingela Lind 和 Ulrik Pettersson。这项工作得到了 ProViking 的资金支持
飞机系统建模 - DiVA 门户
本论文中介绍的工作是在瑞典林雪平大学 (LiU) 管理与工程系 (IEI) 的机械设计系进行的。我要感谢几位在工作期间给予我支持和建议的人;首先,我要感谢我的导师 Petter Krus 教授的指导和支持。这段时间最有趣和最令人鼓舞的工作是我们进行 ModuLiTH(模块化电动汽车)项目课程的时候。我要感谢我在萨博航空系统的工业赞助商和主管:Anders Pettersson 提出了启动研究项目的想法,Stefan Andersson 让我深入参与了萨博航空系统的 MBSE 计划,以及 Erik Herzog 的学术观点和在 SPEEDS 项目中一起度过的有趣时光。在林雪平大学机械设计系,我还要感谢 Olof Johansson 对 NFFP 项目的支持和合作,以及 Björn Lundén 对研究生阶段研究和学习的介绍。我要感谢萨博航空系统公司和机械设计部门 MBSE 领域中令人愉快的团队合作,包括论文、演讲和讨论,其中我想提到的有:Bengt-Göran Sundqvist、Johan Ölvander、Anders Weitman、Sören Steinkellner、Hampus Gavel、Gert Johansson、Lars Karlsson、Ingela Lind 和 Ulrik Pettersson。这项工作得到了 ProViking 研究计划(与瑞典战略研究基金会有关)、NFFP(国家航空工程研究计划)和萨博研究委员会的资助。林雪平,2009 年 3 月 Henric Andersson
飞机系统建模 - DiVA 门户
本论文中介绍的工作是在瑞典林雪平大学 (LiU) 管理与工程系 (IEI) 的机械设计系进行的。我要感谢几位在工作期间给予我支持和建议的人;首先,我要感谢我的导师 Petter Krus 教授的指导和支持。这段时间最有趣和最令人鼓舞的工作是我们进行 ModuLiTH(模块化电动汽车)项目课程的时候。我要感谢我在萨博航空系统的工业赞助商和主管:Anders Pettersson 提出了启动研究项目的想法,Stefan Andersson 让我深入参与了萨博航空系统的 MBSE 计划,以及 Erik Herzog 的学术观点和在 SPEEDS 项目中一起度过的有趣时光。在林雪平大学机械设计系,我还要感谢 Olof Johansson 对 NFFP 项目的支持和合作,以及 Björn Lundén 对研究生阶段研究和学习的介绍。我要感谢萨博航空系统公司和机械设计部门 MBSE 领域中令人愉快的团队合作,包括论文、演讲和讨论,其中我想提到的有:Bengt-Göran Sundqvist、Johan Ölvander、Anders Weitman、Sören Steinkellner、Hampus Gavel、Gert Johansson、Lars Karlsson、Ingela Lind 和 Ulrik Pettersson。这项工作得到了 ProViking 研究计划(与瑞典战略研究基金会有关)、NFFP(国家航空工程研究计划)和萨博研究委员会的资助。林雪平,2009 年 3 月 Henric Andersson