XiaoMi-AI文件搜索系统
World File Search SystemPos

健康联盟HMO/POS
承保信息................................................................................................................................................................................8 • 无既往疾病限制..........................................................................................................................................................8 • 最低基本承保 (MEC)........................................................................................................................................................8 • 最低价值标准.........................................................................................................................................................................8 • 您可以在哪里获取有关加入 FEHB 计划的信息.........................................................................................................8 • 适合您和您家人的加入类型.........................................................................................................................8 • 家庭成员承保.............................................................................................................................................................9 • 儿童平等法案.............................................................................................................................................................10 • 福利和保费何时开始.............................................................................................................................................11 • 当您退休时.............................................................................................................................................................11 • 当您失去福利时.....................................................................................................................................................11 • FEHB 承保何时终止.............................................................................................................................................11 • 离婚时.....................................................................................................................................................................11 • 临时延续承保(TCC)................................................................................................................12 • 转换为个人保险......................................................................................................................................12 • 健康保险市场........................................................................................................................................12 第 1 部分。本计划如何运作......................................................................................................................................13

UnitedHealthCare服务点(POS)计划
简介普林斯顿大学提供了由UnitedHealthcare管理的服务点计划。POS下的覆盖范围只要您和您的家属就可以符合摘要计划说明手册中关于您的福利部分中定义的资格要求。如果您当前是J-1签证上的非公民,则您没有资格参加此计划。POS计划提供了三个级别的覆盖范围:首选网络,网络内非首选和网络外。使用POS,您可以选择所需的任何提供商,但是当您选择UnitedHealthCare Choice Plus网络内提供商时,您会获得更高的收益。此外,使用某些专家时,如果您使用首选的网络内部提供商,您将获得更高的利益(有关其他信息,请参见第2页)。您不必获得网络内或网络外护理的推荐。有些服务在网络外级别没有涵盖,例如耐用的医疗设备和放射学服务。您应该查看SPD以获取详细信息,或致电(877)609-2273与联合医疗保健联系,以在寻求服务之前确认承保范围。
福利摘要高级优势反对科斯塔县基本和增强计划(HMO)
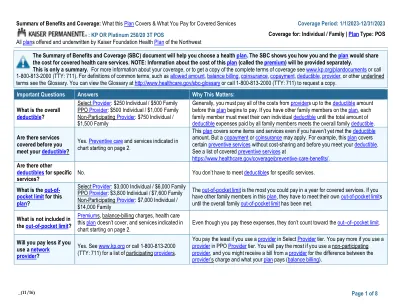
您继续承保范围的权利:如果您想在结束后继续覆盖范围,则有一些机构可以提供帮助。这些机构的联系信息如下图所示。您也可以使用其他覆盖范围选项,包括通过健康保险市场购买个人保险范围。有关市场的更多信息,请访问www.healthcare.gov或致电1-800-318-2596。您的申诉和上诉权利:如果您对拒绝索赔的计划提出投诉,则有一些机构可以提供帮助。此投诉称为申诉或上诉。有关您的权利的更多信息,请查看您将获得该医疗要求的福利的解释。您的计划文件还提供有关如何出于任何原因提交索赔,上诉或申诉的完整信息。有关您的权利,本通知或协助的更多信息,请在下图中与代理商联系。联系信息,以获取继续覆盖范围和申诉和上诉权利的权利:

pos(EPS -HEP2023)648-科学论文集
我们提出了一个引人入胜且内容丰富的外展博览会,称为“到目前为止,如此接近”(SFSC),围绕着Alpha磁性光谱仪(AMS)有效载荷操作控制室(AMS POCC)的复制品[1]。这项倡议旨在增强公众对地球各个控制室中进行的对太空任务有效载荷的持续监控和控制的理解。博览会的独特价值在于展示AMS Collaboration的尖端监视软件,从而访问AMS遥测数据。该软件是大流行驱动的创新,允许在限制对CERN站点的物理访问时进行远程参与。POCC的复制品,并由信息丰富的海报和视频补充,是传达基本研究在太空辐射和宇宙射线中重要性的有效工具。

pos(ICRC2023)1426-科学论文
矮球星系(DSPHS)是最暗的物体(DM),具有可忽略的预期天体伽马射线发射。这使附近的DSPHS间接搜索DM粒子信号的理想目标。对其DM含量的准确知识使得在DM歼灭的速度加权横截面上得出强大的约束。我们使用常见的最大似然方法报告了Fermi-Lat,Hawc,H.E.S.S.,Magic和Veritas观察到的20个DSPH的联合分析,以最大程度地提高DM搜索对这些目标的敏感性。将提出七个歼灭通道的结果,并涵盖从5 GEV到100 TEV的一系列DM质量。此外,将通过比较从两种不同的J因子集合获得的结果来讨论来自DSPH暗物质分布的天体物理J因子的系统不确定性。

pos(lattice2024)039-科学论文
复杂的langevin(Cl)动力学,其中自由度被分析扩展,提供了潜在的解决方案,因为它不依赖重要性采样,而是通过随机过程探索复杂的流形[4,5]。它是随机定量的扩展[6,7],相当于路径积分定量。cl已显示在三个[8]和四个[9]欧几里得维度的晶格场理论中起作用,其中包括严重的符号问题,包括在QCD [10-14]中,但即使在简单模型[15-17]中,它也可能失败。几年前[18-20]阐明了这种情况[18-20],这是通过在实际歧管上的复杂分布与复杂歧管上的真实和正分布之间形式关系的推导,该分布在CL过程中有效地进行了采样,从而导致了正确性的正确标准,需要证实后者验证。然而,问题仍然存在,该方法的可靠性取决于对Cl漂移中无穷大和近杆的分布行为的精确理解。最近的工作可以在例如参考。[21 - 25]。

pos(lattice2024)212-科学论文集
푍(2)晶格量规理论在研究量子代码的量子误差校正阈值概率(QEC)的研究中起着重要作用。对于某些QEC代码,例如众所周知的Kitaev的复曲面/表面代码,可以将QEC解码问题映射到给定噪声模型的统计力学模型上。对阈值概率的研究对应于映射统计力学模型的相图。这可以通过统计力学模型的蒙特卡洛模拟来研究。在[11]中,我们研究了在二维上与综合征测量噪声一起在旋转/表面代码上的逼真噪声模型的影响,并引入了随机耦合 - 平面仪表模型,三维푍(2)×푍(2)×푍(2)lattice Gauge理论。这个新的Z(2)量规理论模型捕获了在去极化和综合征噪声下的紫杉/表面代码的主要方面。在这些程序中,我们主要关注Mont Carlo模拟的各个方面,并讨论了Monte Carlo模拟Z(2)晶格理论的初步结果。

pos(ICRC2021)892-科学论文
从开始点开始,SWGO的主要重点是其在南半球的位置,可通往南部天空和人口稠密的银河平面地区。因此,银河科学是SWGO的动机和科学议程的关键组成部分:南方的地面粒子探测器,对非常高的能量伽马仪敏感。三个关键主题推动设计,因此用于板凳标记SWGO。这些是:脉冲脉冲组织周围的伽玛射线光环;银河差异使用伽马射线发射,包括费米气泡;以及搜索和研究Pevatrons,Pevatrons,pevatrons,Galactic Cosmic Rays的加速器,直到PEV能量。相应地,我们探讨了有希望的脉冲星和光晕候选者位置位于第2节中位置的约束。由于银河平面本质上挤满了沿着视线的相似位置的来源,尤其是沿螺旋臂,因此角度分辨率受到了可能来自伽马射线源的源混乱水平的限制,而伽马射线源近距离接近。然而,在某些情况下,扩展的伽马射线源将导致视力不可避免的视线重叠。用于研究低表面亮度银河差发射的研究,良好的背景排斥是至关重要的; SWGO计划达到可以合理地检测费米气泡的水平。为了检测Pevatrons并研究其光谱具有最高能量的特征,例如它们的光谱曲率,需要良好的能量分辨率和灵敏度(请参阅第3节)。带有SWGO的银河系γ射线科学是一个丰富的机会,可以研究来自pevatrons的最高能量银河系宇宙射线和γ射线光环中的粒子传输过程,包括粒子逃生和由于磁场而引起的。此外,可以通过表明过去活性的费米气泡研究我们星系的复杂进化历史。The ambient sea of Galactic cosmic rays, those which we isotropically detect at Earth, can be probed through studies of the Galactic diffuse gamma-ray emission that arises as a result of interactions with interstellar clouds (producing gamma-rays through the decay of neutral pions) and radiation fields (producing gamma-rays through the leptonic inverse Compton scattering process).

Kaiser Permanente 服务点 (POS) 计划
1. 服务点 (POS) 计划的 HMO 层级由 Kaiser Foundation Health Plan, Inc. (KFHP) 承保,而 POS 计划的参与提供商和非参与提供商层级则由 Kaiser Permanente Insurance Company (KPIC) 承保。KPIC 是 KFHP 的子公司。2. KPIC 已与 PHCS Network 签约,以提供医院和医生服务,并承诺通过合同费率将自付费用保持在较低水平。访问 multiplan.com/kaiser 即可找到参与提供商的在线目录。3. 对于参与提供商和非参与提供商层级,罚款和余额账单费用不适用于您的年度免赔额。4. 参与提供商负责提交索赔。提供商只能在就诊时收取共付额和免赔额。索赔处理完毕后,任何其他会员责任都将列在福利说明中。 5. KPIC 与 MedImpact 签订合同,通过全国连锁药店和独立药店网络提供处方药保险。参与的药店可能会发生变化。
POS AM - 2023 年 4 月 11 日
拟向公众出售的大致开始日期:本注册声明生效日期后不时。如果根据 1933 年《证券法》第 415 条的规定,本表格上注册的任何证券将延迟或持续发行,请勾选以下方框。☒ 如果根据《证券法》第 462(b) 条的规定提交本表格是为了注册发行的其他证券,请勾选以下方框并列出同一发行的较早生效注册声明的《证券法》注册声明编号。☐ 如果本表格是根据《证券法》第 462(c) 条的规定提交的生效后修订,请勾选以下方框并列出同一发行的较早生效注册声明的《证券法》注册声明编号。☐ 如果本表格是根据《证券法》第 462(d) 条提交的生效后修订,请勾选以下方框并列出同一发行的较早生效注册声明的《证券法》注册声明编号。☐ 请勾选表明注册人是大型加速申报人、加速申报人、非加速申报人、小型报告公司还是新兴成长型公司。请参阅《1934 年证券交易法》第 12b-2 条中“大型加速申报人”、“加速申报人”、“小型报告公司”和“新兴成长型公司”的定义: