XiaoMi-AI文件搜索系统
World File Search SystemPose

风险评分可以预测长期肝有关的
山脉 - 海湾博士,医学博士Maja Thiele,医学博士Isabel Graupera,Elisa Pose,医学博士,威廉·皮尔医学博士Kleef,Mathias Reichert,医学博士,教授医学博士Dominique Roulot,医学博士John M Peric,教授医学博士JörnMSchattenberg教授伊曼纽尔(Emmanuel)至医学博士Tsochatztis教授医学博士Indra Neil Guha,马里诺医学博士,医学博士Nier,Anne Llorca,医学博士,Anita。 Harry J by Koning博士,Fernando Cucccietti博士,教授迈克尔·曼斯(Michael Manns),医学博士,教授医学博士Philip N Newsome,医学博士RubénHernaez,教授Align M Allen,医学博士,教授保罗·安吉利(Paolo Angeli),医学博士肯尼亚医学博士的罗伯特·J(Robert J),教授医学博士汤姆·H·卡尔森(Tom H Karlsen)教授医学博士彼得·威尔士(Peter Wales)教授医学博士Vincent Wai-Sung Wong教授NúriaFabrellas博士,教授洛朗城堡医学博士亚历山大·克拉格(Alexander Krag)医学博士弗兰克·拉默特(Frank Lammert)医学博士,教授医学博士Patrick S Kamath和教授Liverscreen
2023-12-27-woburn-open-open-and-recreation-plan- ...
自2002年以来,EOEEA一直在执行环境司法政策,以帮助确保所有马萨诸塞州居民在开发,实施和执行环境法律,法规和政策以及公平的环境利益方面都具有平等保护和有意义的参与。这项政策被认为是认识到,英联邦的整个社区,尤其是英联邦较旧的工业区域及其周围人口稠密的城市社区,正面临着与马萨诸塞州工业遗产相关的许多环境挑战。Residents in these predominantly low-income and minority communities – nearly 29% of the Commonwealth's population – lack open space and recreational resources and often live side-by-side numerous existing large and small sources of pollution and old abandoned, contaminated sites, which can pose risks to public health and the environment (Commonwealth of Massachusetts, Executive Office of Energy and Environmental Affairs, Division of Conservation Services, 2008).对于在英联邦推进环境正义(EJ)至关重要的是公园,开放空间和娱乐等环境资产的公平分配。朝着这一目的而言,在适用的情况下,市政当局应在其开放空间和娱乐计划中确定并确定对社区中EJ人群在社会,娱乐和生态上至关重要的开放空间和娱乐计划。

COLVO:考虑几何和光度一致性
定位病变是结肠镜检查的主要目标。3D感知技术可以通过恢复结肠的3D空间信息来提高病变局部局部的准确性。但是,现有方法集中于单个帧的局部深度估计,并忽略了结肠镜的精确全局定位,因此未能提供病变的准确3D位置。此短缺的根本原因是双重的:首先,现有方法将结肠深度和结肠镜构成估计为独立任务,或将其设计为并行子任务分支。其次,结肠环境中的光源与结肠镜一起移动,从而导致连续框架图像之间的亮度波动。为了解决这两个问题,我们提出了一个新型的基于深度学习的视觉探针框架Colvo,它可以使用两个关键组成部分不断地估算结肠深度和结肠镜姿势:深度和姿势估计的深度策略(DCDP)和轻型一致的校准机制(LCC)。dcdp对夫妇融合和损失函数的利用对夫妇深度和构图估计模式的限制确保了连续帧之间几何投影的无缝比对。同时,LCC通过重新校准相邻帧的光度值来解释亮度变化,从而增强了Colvo的鲁棒性。对COLVO在结肠探测基准上进行的全面评估揭示了其在深度和姿势估计的最新方法上的承受能力。我们还展示了两个有价值的应用:肠道立即定位和完整的3D重建。Colvo的代码可从https://github.com/xxx/xxx获得。

i-sairas 2024 UWB基于A ...
在两个任务中,我们贡献了一个配备3D激光扫描仪映射的漫游车系统。为了使3D激光扫描对齐以获取环境的全球地图,需要将初步的姿势估计附加到单个扫描中[4]。我们使用移动和等待方案,在该方案中,操作员根据3D激光扫描决定了航路点,并使用了几个RGB相机图像来进行情境意识。共享一个单一的目的地姿势帐户,以了解行星任务中存在的通信约束。对于字段操作,实现了图形用户界面,以便轻松选择下一个航路点[12]。流动站然后自动驱动到目标目的地,然后重复周期。这种驾驶模式需要始终知道机器人姿势,因此本地化是至关重要的。

使用人工智能的 AI 瑜伽教练
摘要:所有年龄段的人都可以从瑜伽的身心健康中受益。瑜伽姿势必须正确执行,尤其是在没有教练的情况下,以免对骨骼、肌肉和韧带造成伤害。因此,在图像处理的帮助下,使用人工智能和机器学习将有助于在没有现场教练的情况下向表演者提供反馈。所提出的系统旨在指导用户正确地执行瑜伽姿势,并在他们做错时纠正他们。以文本和音频的形式向用户提供反馈,这可以帮助练习者防止受伤,并增加练习瑜伽姿势的好处。通过从互联网上拍摄各种图像来创建不同瑜伽姿势的数据集。借助 OpenCV 和媒体管道,从网络摄像头的每个图像中找出数据点。现在将其加载到基于卷积神经网络的深度学习模型 (CNN) 中,该模型有助于识别姿势中的错误并产生错误百分比,并以文本或音频期望输出的形式向用户提供所需的反馈,其分类准确率约为 95%。关键词:实时姿势识别、瑜伽、活动识别、媒体管道和人体姿势估计
通过滚动曲线在大规模点云中的全局本地化...
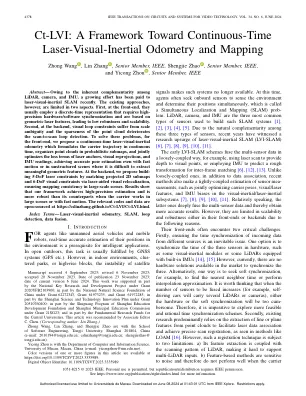
摘要 - 由于LiDar,Camera和IMU之间的固有互补性,最近对激光 - 视觉惯性大满贯付出了越来越多的努力。但是,现有方法在两个方面受到限制。首先,在前端,它们通常采用离散的时间表示,需要高精度硬件/软件同步,并基于几何激光功能,从而导致稳健性和可扩展性低。第二,在后端,视觉循环限制遭受了规模的歧义和点云的稀疏性,扫描到扫描环的检测恶化。To solve these problems, for the front-end, we propose a continuous-time laser-visual-inertial odometry which formulates the carrier trajectory in continuous time, organizes point clouds in probabilistic submaps, and jointly optimizes the loss terms of laser anchors, visual reprojections, and IMU readings, achieving accurate pose estimation even with fast motion or in unstructured scenes where it is difficult to extract meaningful几何特征。在后端,我们通过通过激光辅助视觉重新定位匹配预计的2D子包和6-DOF视觉约束来建立5-DOF激光限制,从而确保在大型场景中映射一致性。结果表明,我们的框架实现了高精度的估计,并且比载体在大型场景或快速移动时工作时更健壮。相关的代码和数据在https://cslinzhang.github.io/ct-lvi/ct-lvi/ct-lvi.html上进行开源。


tsa-fact-sheet-测试无人机技术-...
问:UAS 如何对机场周围的禁区构成威胁?答:UAS 会在交通繁忙区域附近飞行,例如在繁忙的跑道附近或客机周围飞行,从而扰乱商业机场的运营,从而威胁一个国家的交通系统。这种干扰会产生经济影响,因为它们可能会导致飞机改变航线,并可能降落在备用地点,甚至导致飞机部分或全部停飞。UAS 不仅对航空和航空运营构成潜在威胁,而且对地面和

利用人工智能进行瑜伽指导
计算机视觉中的姿势估计是研究恢复身体姿势的策略和系统。在项目背景下确定给定图像中人体部位和关节位置的技术称为身体姿势估计。预训练的姿势估计模型包含面部识别、面部网格、姿势、整体、头发分割、物体识别等解决方案,并与 MediaPipe 的数据一起使用。主要目标是创建一个瑜伽指导系统,分析和记录用户的活动和姿势,以寻找瑜伽计划中的缺陷。之后,通过显示面板告知用户其不良姿势。瑜伽是一种注重身体、心理和精神联系的运动,对健康有益。另一方面,如果练习不当,瑜伽可能会导致健康问题,包括肌肉扭伤和酸痛。我们建议在本研究中开发一个采用交互式迁移学习方法的 Android 或基于网络的平台的瑜伽姿势教学系统。