XiaoMi-AI文件搜索系统
World File Search SystemPrototyping
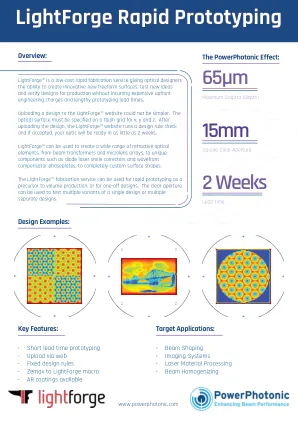
Lightforge快速原型
将设计上传到LightForge™网站并不简单。必须在x,y和z的10μm网格上指定光学表面。上传设计后,Lightforge™网站运行了设计规则检查,如果接受,则您的光学元件将在短短2周内准备就绪。
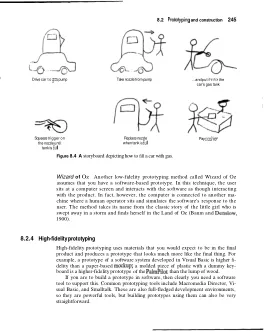
8.2.4 高保真原型设计
当设计经过了足够多次迭代周期,足以确信其符合要求时,必须将通过原型设计和评估迭代步骤学到的所有知识整合起来,以生产最终产品。尽管原型将经过广泛的用户评估,但它们不一定经过严格的质量测试,以测试其他特性,例如稳健性和无错误操作。构建一个供成千上万的人在各种平台和各种情况下使用的产品需要的测试机制与制作快速原型来回答特定问题不同。下面的困境框讨论了两种不同的开发理念。一种方法称为进化原型,涉及将原型进化为最终产品。另一种方法称为一次性原型,使用原型作为最终设计的垫脚石。在这种情况下,

快速原型制作 - Marshall Burns
去年,Marshall Bums 对桌面制造业进行了一项研究,包括其各种技术及其应用。他得出的结论是,自动化制造是最有希望拥有巨大市场的高科技领域,尽管它存在许多具有挑战性的技术问题,但可以立即开发。Bums 博士于 1982 年成立了 Ennex Technology,从事市场技术的研究和开发。其第一个项目是向全美商业客户推销当时新推出的 IBM 个人电脑。该项目的成功为 Bums 博士的第二个项目提供了资金,该项目是 Bums 博士的博士研究计划,于 1991 年 4 月刚刚完成。第三个项目正在考虑中。Bums 博士拥有麻省理工学院物理学学士学位和博士学位。在德克萨斯大学奥斯汀分校获得原子物理学博士学位。

创新和原型收购 Delta
负责运营美国太空部队唯一的 24/7 原型卫星 C2 运营 REPR 卫星运营中心:提供在轨实验和原型设计、创新的操作开发概念和改变游戏规则的技术演示 为支持在轨任务而制作和运营新兴地面 C2 系统的原型 移动靶场运营

两轮自驾机器人的开发与原型设计
摘要:移动机器人技术是机器人技术的一个分支,在该分支中,自平衡机器人类别尤其令人感兴趣,因为这些机器人有望像人类一样在困难的地形上行走,并可用作研究自主控制系统的平台。本文旨在总结两轮自平衡机器人的发展,并以此作为案例研究,展示计算机控制系统在物理系统中的应用。互补滤波器与三轴陀螺仪和加速度计一起使用,以精确测量两轮机器人的旋转,并将数据提供给比例-积分-微分 (PID) 程序,该程序相应地控制电机的功率,以控制其倾斜并实现自平衡。简而言之,机器人设法在小倾斜角度范围内实现自平衡,但是,设计缺陷(例如传感器在较大倾斜角度下脱落)会导致较大倾斜角度下的不稳定。在未来的工作中,可以采用更复杂的控制算法,并可以彻底探索不同机器人构造的影响。

可持续电子设计和原型设计
电子设备在从汽车和智能手机到医疗设备,设备等的所有事物中都起着至关重要的作用。随着新技术的快速进步和部署,使用旧一代硬件的设备很快就会过时,并丢弃了其最新同行的设备。例如,平均智能手机在升级前估计要有2 - 3年[29]。在2019年,电子产品的这种快速消费周期的电子废物量约为5360万吨(MT),预计该数字将在2030年每年迅速增长到74(MT)以上,使电子废物以每年2亿吨的2吨[9]成为增长最快的废物流。同时,电子废物的回收率每年仅增长0.4吨。电子产品是一些最复杂的废物流。这包括用于减少导电迹线的焊料或金和铜的熔点,半导体材料的熔点,例如用于高性能转移的半导体材料,例如用于高性能转移的木质材料,热塑性和热塑性树脂以及各种特种化学物质,例如阻燃剂。尽管这些材料对各自的应用具有理想的特性,但其中许多材料也具有剧毒,对人类健康和环境正义具有重大影响。复杂的性质和危险材料为回收施加了高昂的成本,这导致许多更富有,更发达国家将其电子垃圾发送到国外[30]。在这项工作中,我们探索了图。1。具体来说,我们可以创建一个完全圆形的生产cy-cle,其中可以通过自然生物周期回收,再生或再生电子产品?我们强调,设计包含可生物降解材料的真实设备的这种愿景不是依赖尚未发明的技术的抽象未来。在这项工作中,我们证明可以构建端到端功能鼠标,该端机鼠标结合了现有的可生物降解材料和制造技术。我们选择一只鼠标作为案例研究,并表明我们可以立即减少体现碳足迹并通过设计减轻电子废物的危害。我们通过可持续HCI(SCHI)[2,17,22]的镜头来解决电子废物的问题,并列出了我们在下面概述的设计和原型电子设计的四个指导原理:
太空发展部队的原型设计
– SMC – 建造卫星/企业地面系统 – 来自多个承包商的 PTS 有效载荷 – 来自多个承包商的 PTW 调制解调器 – 海军 – 建造 WAMS – 国际合作伙伴 – 进行概念验证演示 – 商业供应商 – 在未来 COMSATCOM 阶段展开合作

数字原型支持的应用...
摘要 原型设计是工业和学术环境中产品开发不可分割的一部分,也是设计教育的主要主题。然而,由于原型设计范围有限,它仍然被视为一项学生实施不佳的设计活动;这一挑战提出了制定结构化指南的必要性。由于分布式设计项目在设计教育中越来越受欢迎,研究强调了数字工具的必要性,以确保全球分散的学生之间的有效协作和沟通。本研究旨在探索学生对原型支持工具 (PST) 的使用情况,该工具旨在协助规划、记录和评估他们的原型设计活动。见解表明,该工具的数字版本 (e-PST) 使学生能够有效地沟通并在记录他们的设计过程时表现出更高的能力,为他们的决策提供理由,并说明他们的结果是如何通过设计迭代来形成的。通过对参与学生的调查和访谈,提出了进一步改进 e-PST 的建议。