XiaoMi-AI文件搜索系统
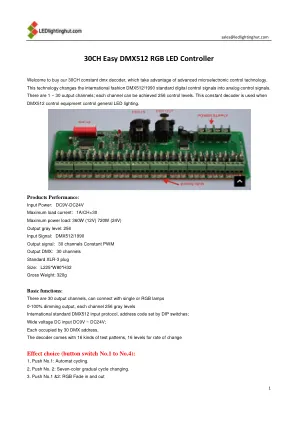
World File Search SystemRGB
MB3514 - RGB 编码器
注意:如果超过上述绝对最大额定值,可能会造成器件永久性损坏。功能操作应限制在本数据手册操作部分详述的条件下。长时间暴露在绝对最大额定值条件下可能会影响器件的可靠性。

宪报封面RGB bluev2c
大卫·约斯特(David Yost)居住在八个国家和十个城市中。这包括在洛杉矶特罗贝大学,澳大利亚国立大学,柏林自由大学,埃斯特雷普拉拉大学,沙特国王大学和巴拉拉特大学/联邦大学的全职工作。他曾获得伊丽莎白二世女王奖学金,洪堡奖学金和莱斯特·福特奖。他的领导职务包括三年的副校长,在Feduni的信息学和应用优化中心的代理主任两年,以及奥斯特姆斯年度会议的一度董事。他的大部分研究都在Banach的空间中,但近年来,他专注于组合几何形状。他还涉足C* - 代数,近似理论,有限的尺寸凸度和优化。

通过半多极微型...
在用于液晶显示的背光系统中,缺乏极化性能的传统红色,绿色和蓝色(RGB)光源可能会导致通过偏振层的光学损失高达50%。为了解决这一效率并优化能源利用,本研究提出了一种用于RGB极化排放的高性能装置。该设备采用了具有固有极化能力的半极蓝色的阵列,并与绿色发射CSPBBR 3纳米棒的机械拉伸膜结合使用,并发射红色发射CSPBI 3 -CS 4 PBI 6 PBI 6混合纳米晶体。聚合物膜中的CSPBBR 3纳米棒提供了内在的极化发射,而稳定的CSPBI 3 -CS 4 PBI 6 PBI 6混合纳米晶体形成的对齐的结构则有助于实质性各向异性排放,这是由于它们的高dieLec-Tric-tric常数。所得设备的RGB极化度分别为0.26、0.48和0.38,并展示了宽色范围,达到了NTSC标准的137.2%和REC的102.5%。2020标准。当使用C-平面LED进行激发的设备时,当前方法将通过偏光层传播的光强度增加了73.6%。含有RGB组件的极化设备的这种新颖的制造方法对推进下一代展示技术具有相当大的希望。
采用深度学习方法进行机载 RGB 河流...
Patrice E Carbonneau 1、Stephen J Dugdale 3、Toby P Breckon 2、James T Dietrich 4、Mark A Fonstad 5、Hitoshi Miyamoto 6 和 Amy S Woodget 7

RGB成像作为监测室内作物植物生产的工具
未来在太空中的作物生产将需要强大的监测技术,以优化农作物产量,减少废物并生成自动化植物生长设计的数据。成像被认为是测量植物健康的工具,但是尚未在太空飞行中测试室内作物的成像系统。幸运的是,已经捕获了ISS上高级植物栖息地(APH)内生长的作物植物的RGB图像。在基于地面的研究中,肯尼迪航天中心(NASA,KSC)正在与美国农业部(USDA ARS)合作,以开发一种用于监测室内农作物植物健康状况的成像系统。在一项研究中,我们在14天的时间内将干旱应力应用于“龙龙”生菜植物,并以24小时的增量捕获了RGB图像。图像,并应用差异指数,可以使用图像来检测生菜中的干旱应激。然后将此差异指数应用于APH地面单元内收集的RGB图像,以在不同的底物水分条件下进行飞行前的实验,并在不同的底物水分条件下生长出“超湿”生菜,结果表明,RGB摄像机能够检测到太空飞行植物生长硬件内的干旱应力。这些结果表明,已经部署到太空的RGB摄像机可能会提供有价值的信息,以监视外星环境中的植物生产。这项研究得到了NASA的太空生物学计划的支持。

使用热的...
与互联网连接的相机支持许多有用的家庭监控和健康应用。但是,这些相同的摄像机indiscrim-捕获敏感和个人身份信息(PII),限制了它们在某些情况(例如房屋)中的接受。先前的工作删除了感兴趣的区域(ROI)以确保图像并改善隐私。但是,仅依靠RGB信息查找人员的方法容易受到环境和照明条件的影响,从而导致它们失败和泄漏PII。从我们的部署研究中,使用仅RGB的方法时,将近一半的包含人的图像泄漏。此外,经常进行ROI删除,要求服务器对这些操作进行可信赖。这项工作介绍了隐私系统,在添加热传感的情况下,我们的系统具有明显增强的RGB图像和视频中的人的能力,并在存储或传输任何数据之前在设备上有效地将其删除,同时又留在典型的IoT Power限制下。从我们上述的部署研究中,在办公室建造中庭,家庭住宅和室外公园环境中,私人原型有效地以99的消毒率有效地消除了PII。1%。此外,Privacylens可以使用其嵌入式GPU生成用于下游CV/ML任务的设备功能,如三个说明性应用中所示,进一步降低了PII的集合和存储。

使用RGB空中图像和机器学习检测咖啡叶矿工
摘要:咖啡生产的可持续性是全球生产者的关注点。为了保持可持续性,有必要达到令人满意的咖啡生产力和质量。害虫和疾病会降低生产率,并可能影响咖啡豆的质量。为了确保可持续性,生产商需要监测可能导致大量农作物损失的害虫,例如咖啡叶矿工Leucoptera Coffeella(Lepidoptera:Lyonetiidae),属于鳞翅目命令和Lyonetiidae家族。这项研究旨在使用机器学习技术和植被指数来远程识别咖啡叶矿工在咖啡种植地区的侵扰。咖啡叶矿工侵扰的现场评估是在2023年9月进行的。使用远程试验的飞机拍摄航空图像,以确定带有RGB(红色,绿色,蓝色)图像的13个营养指数。使用ArcGIS 10.8软件计算植被指数。一个综合数据库,其中包含咖啡叶矿工侵扰,植被指数和作物数据的详细信息。数据集分为培训和测试子集。使用了四种机器学习算法:随机森林(RF),逻辑回归(LR),支持向量机(SVM)和随机梯度下降(SGD)。超参数调整后,采用了测试子集进行模型验证。值得注意的是,SVM和SGD模型在估计咖啡叶矿工侵扰方面均表现出卓越的性能,KAPPA指数分别为0.6和0.67。植被指数和作物数据的综合使用提高了咖啡叶矿工检测的准确性。RF模型的性能不佳,而SVM和SGD模型的性能更好。这种情况突出了追踪咖啡叶矿工在不同年龄,不同品种和其他环境变量不同的领域中的挑战。

IMG2nDSM:使用深度学习从单个机载 RGB 图像估计高度
摘要:估计单幅航拍图像中建筑物和植被的高度是一个具有挑战性的问题。提出了一种以任务为中心的深度学习 (DL) 模型,该模型结合了成功的 DL 模型(U-NET 和残差网络)的建筑特征,并学习从单个航拍图像到规范化数字表面模型 (nDSM) 的映射。该模型在具有相应 DSM 和数字地形模型 (DTM) 的航拍图像上进行训练,然后用于推断没有高程信息的图像的 nDSM。使用覆盖英国曼彻斯特大片地区的数据集以及 2018 年 IEEE GRSS 数据融合竞赛 LiDAR 数据集对该模型进行了评估。结果表明,所提出的 DL 架构适合该任务,并且大大超越了其他最先进的 DL 方法。