XiaoMi-AI文件搜索系统
World File Search SystemRGB
NRL 主要设施。 - DTIC
. 可以容纳,邀请潜在用户联系与设施相关的个人以获取更多信息。 这是第一个完全以电子形式创建的 NRL 出版物。 文本被扫描并保存在 MS Word 中,然后导入到 Macintosh 上的 PageMaker 5.0 中。 设施的原始 :opy 底片被扫描、数字化并放在 Kodak Photo CD 上。 从 Photo CD 打开数字图像,从 RGB 转换为灰度,进行电子增强,并在 Adobe Photoshop 中保存为 300 dpi 灰度图像。 然后将它们放入包含文本的 PageMaker 布局中。 带有链接灰度图像的整个数字文件以负片形式在 Linotronic 330 照排机上生成,并发送到商业机构进行胶印。
![arxiv:2303.04376v2 [CS.CV] 2024年2月21日](/simg/c\c08cba40f15bbb2f314c7e7ff6ea1da6df626a12.webp)
arxiv:2303.04376v2 [CS.CV] 2024年2月21日
无监督的视频对象细分(UVO)是指无需手动指导即可在视频中分割突出对象的具有挑战性的任务。换句话说,净工作在没有先验知识的情况下以一系列RGB框架检测目标对象的准确区域。在重点作品中,已经讨论了两种可以分为:基于外观和外观运动的方法。基于外观的方法利用框架间的范围信息来捕获通常以序列出现的目标对象。但是,这些方法不考虑目标对象的运动,这是由于利用随机配对帧之间的相关信息。另一方面,基于外观运动的方法将RGB帧中的外观特征与光流的运动特征融合在一起。运动提示提供了有用的信息,因为显着对象通常在序列中显示出独特的运动。但是,这些方法的限制是对光流的依赖性主要是主要的。在本文中,我们提出了一个针对紫外线的新型框架,可以从时间和规模上提出上述两种方法的局限性。时间对齐融合将相邻帧的显着信息与目标框架保持一致,以利用相邻帧的信息。比例比对解码器通过连续映射与隐式神经表示通过连续映射汇总不同规模的特征图来预测目标对象掩模。我们在公共基准数据集,戴维斯(Davis)2016和FBM上提出了实验结果,这些结果证明了我们方法的有效性。此外,我们在2016年戴维斯(Davis)上的最先进方法。索引术语 - 视频对象细分,时间对齐,比例对齐,隐式神经代表,联合培训

基于优化的U-NET的2D图像的单眼深度估计
从2D图像中估算深度在各种应用中至关重要,例如对象识别,场景重建和导航至关重要。它在增强现实,图像重新关注和细分方面具有显着优势。在本文中,我们根据传输学习编码器和高级解码器结构提出了一个优化的U-NET网络,以估算单个2D图像的深度。编码器– decoder架构是从Resnet152v2构建的,作为编码器和改进的基于U-NET的解码器,以实现准确的深度预测。引入的RESNET152V2网络已在广泛的Imagenet数据集上进行了预估计,该数据集具有为大规模图像分类提取丰富且可推广的特征的权重。该提出的编码器可以具有先验知识来减少训练时间并改善对象位置识别。在解码器中设计的提议的复合上采样块(CUB)应用了2倍和4倍双线性插值,结合了一速式转置卷积,以扩展从编码器获得的低分辨率特征图,从而使网络恢复了更详细的细节。跳过连接用于增强解码器的表示能力。每个向上采样块的输出与相应的池化层串联。来自不同量表的特征融合有助于捕获本地和全球上下文信息,从而有助于更准确的深度预测。此方法利用RGB图像和深度图作为NYU DEPTH DATASET V2的训练输入。实验结果表明,基于转移学习的编码器,再加上我们提出的解码器和数据增强技术,可以使复杂的RGB图像转换为准确的深度图。系统根据深度数据范围为0.4至10 m,准确地对不同的深度范围进行了分类。通过使用渐变色尺度将不同的深度映射到相应的颜色,可以在2D图像上执行精确的深度分类。
贝尔 429 产品规格
• 所有主要飞行和导航仪表 • 飞行指引仪和自动驾驶仪状态显示 • 发动机和旋翼驱动系统指示 • 电气、液压和燃油系统监控 • 机组警报系统(警告/注意事项/咨询和声音警报) • 导航路线地图显示 • 可选交通防撞符号 (TCAS) 显示 • 可选气象雷达或搜索雷达信息显示 • 可选 FLIR/EVS 视频显示(NTSC 或 PAL 标准)显示 • 通用彩色视频显示或数字地图显示(S-Video 或 Component RGB 视频中的 NTSC 或 PAL 标准)显示电气、AFCS 和燃油/重量与平衡概要信息显示 • 自动功率保证、A 类性能和悬停性能计算显示 • 维护和诊断数据显示

气候变化人工智能数据集愿望清单
描述:具有全球覆盖范围和不同(粒度)时间片的各种空间和光谱分辨率的卫星(和/或航空)图像。这些数据在农业(土壤成分、作物产量和作物类型检测)、森林和高风险生态系统监测(树高/类型和土地覆盖估计)、城市(建筑物高度估计)、能源(风力涡轮机和太阳能电池板定位)以及跨行业(甲烷、二氧化碳和一氧化二氮测量)中有着广泛的应用。不同的应用需要不同的空间、光谱和时间分辨率以及不同类型的标签。例如,对于能源、建筑和运输领域的许多监测应用,空间分辨率更为重要,并且经常使用非常高分辨率的 RGB 图像。光谱分辨率对于植被和土地利用等更为重要。

蚀变制图的主成分分析* - ASPRS
摘要:减少主成分分析 (PCA) 输入的图像波段数量可确保某些材料不会被映射,并增加其他材料被明确映射到其中一个主成分图像中的可能性。在干旱地形中,如果只有一个输入波段来自可见光谱,则四个 TM 波段的 PCA 将避免氧化铁,从而更可靠地检测含羟基矿物。如果仅使用其中一个 S m 波段,则用于氧化铁映射的 Pw\ 将避免羟基。然后可以创建一个简单的主成分彩色合成图像,其中羟基、羟基加氧化铁和氧化铁的异常浓度在红绿蓝 (RGB) 颜色空间中明亮地显示。该合成允许对蚀变类型和强度进行定性推断,可以广泛应用。
自然积极城市研讨会
今天在城市发展项目中提供生物多样性保护,通常被视为黄金海岸市的自然城市战略是一项跨越25年以上的环境战略,跨越了25年的交付,以创建一个自然阳性的城市,增强其自然环境网络,并旨在实现和谐平衡以维持自然界的城市。既定的绩效措施之一是致力于该市本地植被的51%覆盖率。为了支持目标的交付和健康的自然环境,建立了一项关键的战略计划,以恢复整个城市拥有的保护区(约13,789公顷)的本地森林。该计划利用重建,辅助再生和自然再生。每年从纳税人那里收取征收征收,这有助于资助恢复和维护3,700公顷/年的城市拥有的保护区。该计划是通过创新的决策工具(ORESTORE)来管理的,用于在时空上智能分配恢复资金。修复动力项目评估了修复计划的成功。在这里,我们对2005年至2022年之间采取的恢复行动进行定量评估。我们对时间光检测和范围(LIDAR)点云数据,空中RGB光学成像和基于现场的生物条件调查进行了跨学科分析,以评估植被状况。遥感(LIDAR和RGB光学图像)可以用作生物条件的替代物,但是物种鉴定需要现场调查来确定非本地植物覆盖。在高大的开放桉树森林中,自然再生经常被持续存在数十年的杂草物种所抑制,而干预(辅助再生)需要促进开放的桉树森林的恢复。黄金海岸市正在与大学和行业合作伙伴合作,以使用地理空间分析来开发一个复杂的工具箱,用于管理整个保护区的修复计划,环境报告和灾难管理。

实时签名 - 芬格 - 诉说 -
摘要:手语允许静音人交流,当对话主义者无法理解时,就会出现问题。尽管努力解决了这个问题,但尚未找到有效的解决方案。在这项工作中,卷积神经网络(CNN)在两个不同的数据集上进行了培训 - 二进制和红色蓝色绿色)RGB(每个都包含25,900张尼日利亚手语的图像。使用深度神经预训练的模块来检测视频供稿中的手势,该模块解决了复杂背景的问题,在昏暗的区域也显示出极好的检测。在培训和验证集中分别获得了(98.95%,76%)和(98.87%,98.85%)的精度。开发的实时系统将这两个模型作为单个系统实现,这使其成为独特的系统。

多模式和多任务自动驾驶数据集
当前用于自动驾驶计算机视觉的深层神经网络(DNNS)通常在仅涉及单一类型的数据和urban场景的特定数据集上进行培训。因此,这些模型努力使新物体,噪音,夜间条件和各种情况,这对于安全至关重要的应用至关重要。尽管持续不断努力增强计算机视觉DNN的弹性,但进展一直缓慢,部分原因是缺乏具有多种模式的基准。我们介绍了一个名为Infraparis的新颖和多功能数据集,该数据集支持三种模式的多个任务:RGB,DEPTH和INDRARED。我们评估了各种最先进的基线技术,涵盖了语义分割,对象检测和深度估计的任务。更多可视化和
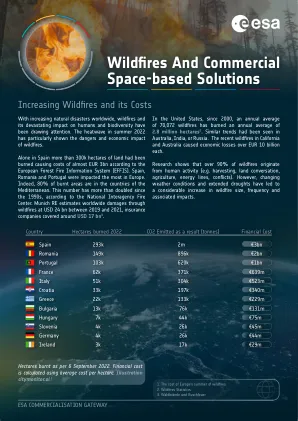
野火和商业太空解决方案
垂直整合的解决方案也在不断涌现。OroraTech 成立于 2018 年,是 ESA BIC Bavaria 校友,成功完成了 FOREST-1 任务:一颗配备 RGB、长波红外 (LWIR) 和中波红外 (MWIR) 摄像机的卫星,于 2022 年 1 月搭载 Spire 纳米卫星发射升空 15 。OroraTech 在市场上提供的产品野火情报解决方案利用卫星数据进行野火探测和监测以及精确的损害评估。它被全球客户使用,每天探测到 1000 多起火灾,保护了超过 1.6 亿公顷的森林。OroraTech 的解决方案客户来自林业、政府和非政府组织部门,遍及六大洲。通过 ESA InCubed 计划,ESA 正在支持 OroraTech 的 FOREST-3 实施阶段 17 。