XiaoMi-AI文件搜索系统
World File Search SystemRGB

3D场景数字化的AI潜力
迈克尔·温曼(Michael Weinmann)在Karlsruhe技术学院(2003-2009)学习了电气工程和信息技术,并于2016年获得了波恩大学的计算机科学博士学位。然后,他继续担任博士后研究员和讲师,重点关注波恩大学视觉计算系(直到2021年)的计算机视觉和图形,以及X-Rite研究生院的项目协调员在数字材料外观上。2021年,他加入代尔夫特技术大学,担任智能系统系的助理教授。在计算机视觉,计算机图形和机器学习的交汇处工作,他的研究目标是从不同传感器(即RGB或RGB或RGB信息,深度图,多光谱测量等)中获得的图像或视频数据的了解。),重点是对3D场景的准确,有效的捕获以及它们的解释和可视化。因此,特别的重点是基于利用专用的先验(例如结构性或程序性规则,神经先验或物理学知识的机器学习)来开发可靠的解决方案。各自的研究结果用于跨学科的应用程序场景,包括机器人技术,直播场景中的远程敏感/远程操作,医疗应用以及文化遗产,虚拟原型,土木工程,建筑,建筑和艺术的应用。
使用深度学习进行肿瘤大小估计和 3D 模型查看
在花费大量时间尝试所有可能的格式后,作者选择了 TIFF(标签图像文件格式)格式。在 TIFF 格式中,图像和与图像相关的数据信息都存储在文件中。将 DICOM 扫描转换为 TIFF 格式后,进行了规范化,将像素阵列规范化为 256 个交叉 256 个图像,因为每个受试者的每幅图像在受试者和位置之间各不相同。对图像进行规范化后,将彩色图像从 RGB 格式转换为灰度格式,因为这可以减少计算要求。处理 RGB 格式的图像比处理灰度需要更多的 GPU 计算能力和资源。除了规范化和灰度转换之外,作者还尝试

基于火焰的NERF调节3D脸渲染
摘要。传统的3D面模型基于带纹理的网格表示。最重要的模型之一是火焰(通过刻板模型和表达式学习的面孔),它会产生完全可控制的人脸的网格。不幸的是,此类模型在捕获几何和外观细节方面存在问题。与网格表示相反,神经辐射场(NERF)产生极其清晰的渲染。但是,隐式很难动画,并且不能很好地推广到看不见的表达。有效控制NERF模型以获得面部操纵并不是微不足道的。本文提出了一种名为Nerflame的新方法,该方法结合了NERF和火焰方法的优势。我们的方法使NERF具有高质量的渲染能力,同时对视觉外观完全控制,类似于火焰。与使用神经网络进行RGB颜色和体积密度建模的传统基于NERF的结构相反,我们的方法将火焰网格用作独特的密度体积。因此,颜色值仅存在于火焰网格的附近。我们的模型的核心概念涉及根据其与网格的接近度调整体积密度。此火焰框架无缝地融合到NERF体系结构中,以预测RGB颜色,从而使我们的模型能够明确并隐式地捕获RGB颜色。
俄克拉荷马州视光学院住院医师培训...
Clay-Rhynes/RGB 眼科疾病住院医师将接触各种眼部和全身疾病,每天接触尖端仪器。住院医师实习分为 Clay-Rhynes 眼科诊所(俄克拉荷马州杜兰特)和 RGB 眼科协会(德克萨斯州谢尔曼)。Clay-Rhynes 眼科诊所是我们 8000 平方英尺先进诊所中的一家高容量医疗/外科诊所,住院医师将在那里进行 YAG 囊切开术、虹膜切开术和玻璃体溶解术,以及放射外科病变切除术和异物去除术。住院医师将参加所有手术,并为住院医师转诊的每位接受白内障和 LASIK 手术的患者进行所有术后护理。住院医师将有机会观察和管理大量青光眼、白内障和黄斑变性患者。然而,由于我们的人口统计数据,住院医师


计算机视觉预测收获的影响...
摘要 - 全球计算机视觉的加速发展对水果收获的估计产生了重大影响,从而提高了效率并大大减少了食物浪费。此外,这项技术在农业部门面临着显着的抵抗力和缺乏知识。本综述的目的是分析人工视力方法在预测高茎果的收获时。因此,应用了非实验性描述性设计,属于无荟萃分析的系统综述。基于定义的标准(包含和排除),从电子数据库Scopus,Scielo和Redalyc中选择了26篇开放访问文章,这些文章涉及使用VA来预测高茎水果的收获。的发现表明,大多数研究使用近红外(NIR)光谱和RGB图像处理来估计收获,分别达到95%(柑橘类水果)和75%(苹果)的平均准确性。此外,使用RGB和YOLOV3图像传感器的无人机的使用使得获得大于90%的精确度成为可能,从而实现了收获前4到6个月之间的预测。得出结论是,使用最常用的VA方法是RGB图像传感器,光谱法(NIR),无人驾驶飞机(UAV)和Yolov3,它们在预测高茎果实的成熟方面的准确性大于75%。该方法的选择将主要取决于您是要分析果实的内部还是外部部分,因此,重要的是要识别高茎果实在其生长阶段的色素沉着的变化。
人工智能的应用——图像处理
彩色图像和不同的色彩空间。根据图像类型,我们可以讨论伪彩色处理(当颜色被分配灰度值时)或 RGB 处理(对于使用全彩色传感器获取的图像)。• 图像压缩和解压缩允许
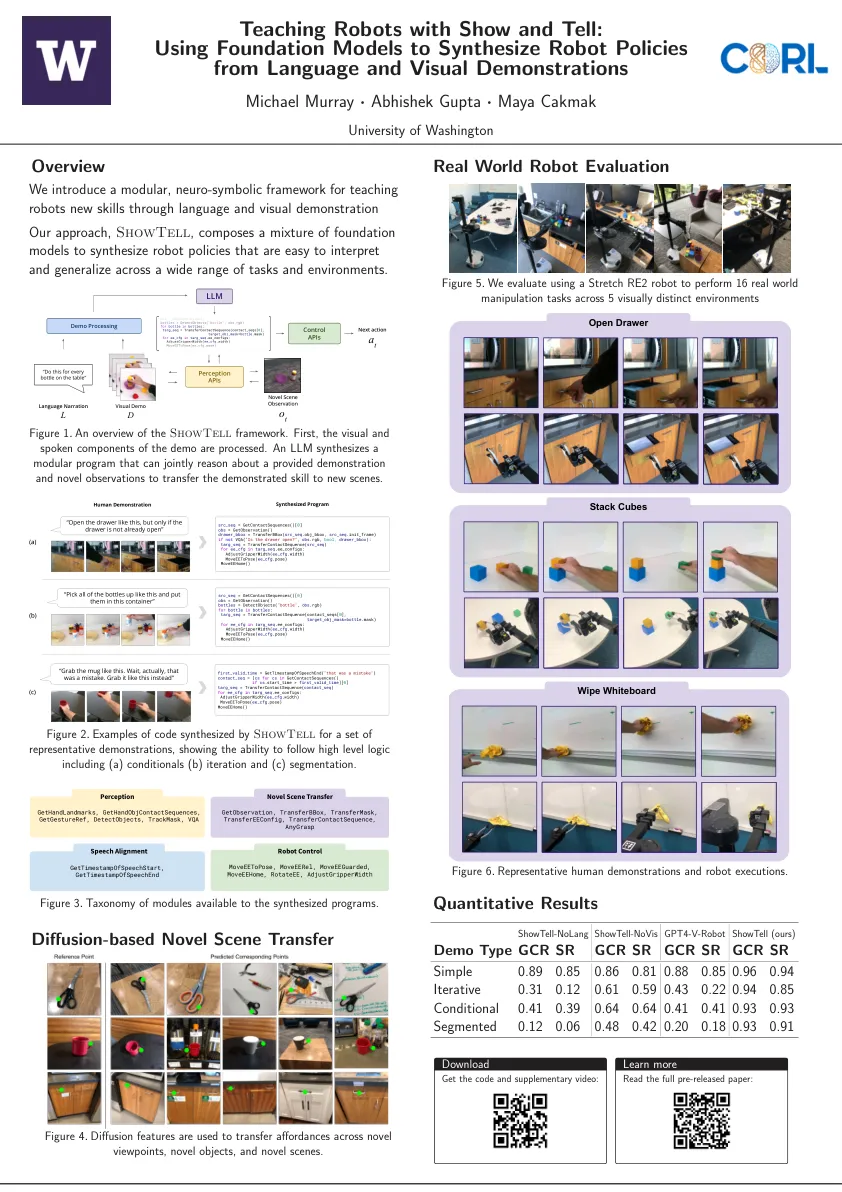
与Show and Tell一起教机器人-Michael Murray
src_seq = getContactquences()[0] obs = getObbox = trassebbox(src_seq .obj_bbox,src_seq .init_frame)如果不是vqa(“ draweer open吗?,obs .rgb,boool,draweer_bbox):targ_seq = TranscerContactSequence(src_seq)for targ_seq .eeq .eeq .eeq .eeq .eeq .eeq .eeq .eq.configs:adpadGripperWidth(ee_cfg .width)moveToopse(ee_cfg.width)moveToopse(ee_cfg .pose .pose)Moveeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeehome()