XiaoMi-AI文件搜索系统
World File Search SystemRGB

渲染和扩散:基于扩散的行为克隆
摘要 - 在机器人学习的领域,高维观测值(例如RGB图像和低级机器人动作)之间的复杂映射,两个本质上非常不同的空间构成了一个复杂的学习问题,尤其是在有限的数据中。在这项工作中,我们介绍了一种使用机器人3D模型的虚拟渲染器在图像空间内统一的低级机器人动作和RGB观察的方法。使用此联合观察表达表示,它使用学习的扩散过程计算低级机器人动作,该过程迭代地更新机器人的虚拟渲染。此空间统一简化了学习问题,并引入了对样品效率和空间概括至关重要的电感偏差。我们在模拟中彻底评估了研发的几种变体,并展示了它们在现实世界中六个日常任务上的适用性。我们的结果表明,研发具有强大的空间概括能力,并且比更常见的图像到动作方法更有效。
无标题-IIRS入学门户
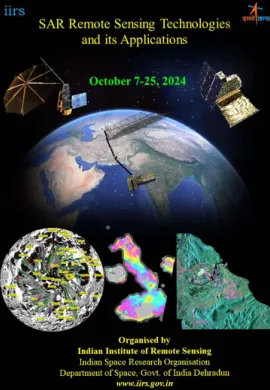
fi g。 2。这种极化分解·基于印度的RGB图像·04 0 \ .. Vi5akhapatnam,印度。突出显示了独特的散射现象RED REPRE SMTS双重散射。蓝色指示单反射散射。和Grem表示,量扫描..- d = mt,
生物信息学在数字化生物经济中的作用
硬件:•配对•3D扫描仪•激光切割器•3D打印机(1个连续,1个独立的双挤出机)•原型辅助系统(空间增强现实)•RGB摄像机(Sony)(Sony)•工作站•工作站•AR眼镜(HoloLens 2)•Optirens 2)•Optirens 2) Micropohne(高温和湿度)•…

dmr:视觉增强学习中的框架和事件融合的分解多模式表示
我们使用两种互补视觉方式探索视觉增强学习(RL):基于框架的RGB凸轮和基于事件的动态视觉传感器(DVS)。iSTING多模式视觉RL方法在有效提取与任务相关的信息时经常遇到挑战。为了解决这个问题,我们提出了用于视觉RL的分解多模式表示(DMR)框架。它将输入分为三个不同的组成部分:与任务相关的效果(共同功能),RGB特异性噪声和DVS特异性噪声。共同创作表示与RL任务相关的两种模式中的完整信息;这两个噪声组件都受到数据重构损失以避免信息泄漏的约束,与共同创作形成对比,以最大程度地差异。广泛的经验表明,通过明确分开不同信息的类型,我们的方法可实现与最先进的方法相比,实质性改善的政策绩效。

重播:通过...
摘要。3 D传感是自动驾驶汽车的基本任务。其部署通常依赖于对齐的RGB摄像机和激光镜头。谨慎的同步和校准,在LiDAR投影的深度图中,系统的错位持续存在。这是由于两个传感器之间的物理基线距离所致。工件通常反映为背景激光雷达错误地投射到前景上,例如汽车和行人。KITTI数据集使用立体声摄像机作为启发式解决方案来删除工件。但是,大多数AV数据集(包括Nuscenes,Waymo和DDAD)都缺少立体声图像,使Kitti解决方案不适用。我们提出了Replay,这是一种无参数的分析解决方案,用于删除投影伪像。我们在假设的虚拟LiDAR相机和RGB摄像机之间构建了一个Binocular视觉系统。然后,我们通过使用拟议的分析溶液确定面孔闭塞来删除投影伪影。我们显示出具有无伪像的深度图的最先进(SOTA)单眼估计器和3 d对象探测器的一致改进。

徕卡 BLK247 AI
Leica BLK247 AI 软件使用先进的机器学习算法,可将物体分类为“人类”或“非人类”。与其他技术不同,BLK247 AI 根据 LiDAR 数据而非图像数据对物体进行分类。这样,在任何照明条件下或因隐私原因禁止使用 RGB 图像的区域,都可以进行精确分类。
引用:Alaaudeen,KM和Selvarajan,S和Manoharan,H和Jhaveri,RH(2024)智能机器人技术收获系统的水果过程,用于抓住P
本文提出并执行了一种基于深度学习的图像处理方法,用于自摘苹果。该系统包括一个轻巧的一步检测网络,用于水果识别。以及计算机视觉,以分析积分类别,并在抓取之前为每个水果提供正确的方法位置。使用高分辨率摄像头的原始输入,在RGB照片上进行了水果识别和实例分割。计算机视觉分类和抓地力系统是集成的,并提供了种植的食物的结果,作为每个苹果和橙色到机器人手臂执行的输入信息和输出方法的姿势。在从实验室和种植园环境中获取RGB图片数据之前,将评估开发的视觉方法。机器人收获实验是在室内和室外进行的,以评估拟议的收获系统的性能。研究结果表明,拟议的视力技术可以有效地控制机器人收获,而确切的情况下,在预测过程后,鉴定成功率的增加高于95%以上,而重新计算的重新计算不到12%。

基于快速检测纸板
摘要:长期以来,农药残留物一直是食品安全的重要方面,这一直是一个主要的社会问题。这项研究对基于酶抑制方法鉴定农药残留物快速检测卡的研究和分析进行了研究和分析。在这项研究中,图像识别技术用于从快速检测卡的检测结果中提取颜色信息RGB特征值,并建立了四个回归模型,以定量预测使用RGB特征值快速检测卡指示的农药残留浓度。四个回归模型是线性回归模型,二次多项式回归模型,指数回归模型和RBF神经网络模型。通过研究和比较,已经表明,指数回归模型在预测快速检测卡指示的农药残留浓度方面表现出色。相关值为0.900,均方根误差为0.106。当预期浓度接近0时,不会有负预测值。这为基于酶抑制方法的农药残留物快速检测卡开发图像识别设备的开发提供了一种新颖的概念和数据支持。
使用计算机视觉的自行车道分析
该项目是评估应用于微型动力使用者的深度学习技术和计算机视觉技术的潜力的概念证明。 div>主要目的是开发和测试能够自动检测车辆,行人和轻型移动性的用户,估计其与用户的距离,并仅使用RGB摄像机的数据确定其在指定的自行车道中的存在。 div>