XiaoMi-AI文件搜索系统
World File Search SystemRGN

这是预先发布的版本。
图1相位,形态,微结构和元素分布信息。(a)Ni-Co 9 S 8 /RGN,Ni-Co 9 S 8,Co 9 S 8 /RGN,NIS /NI 9 S 8 /RGN和RGN材料的XRD模式; (b)Ni-Co 9 S 8 /RGN的SEM图像; (c)Ni-Co 9 S 8 /RGN的HAADF-STEM图像; (d)Ni-Co 9 S 8 /RGN的HRTEM图像和相应的SAED模式(插图); (e)Ni-Co 9 S 8 /RGN的HAADF-STEM图像,相应的反向散射电子图像(F)和Ni,Co,s,c元素的EDS地图。

2025 年 1 月 2 日 绿带新闻评论
位于 Greenbelt Road 8403-8495 号的许多 Chelsea Wood 公寓居民这个假期都没有暖气。他们向管理公司(RGN Management Services of Largo)和公寓董事会请求,并向县和州政府以及民选官员求助,但收效甚微。居民的困境凸显了公寓业主在出现问题时所面临的复杂性。管道故障问题源于为 280 个单元提供供暖和制冷的管道系统。单元业主 Jessica Fomalont 说,当她 2005 年搬到那里时,她被告知供暖系统是 1965 年安装的。她说,2024 年 10 月有一根管道破裂,导致一半的建筑无法供暖。承包商于 11 月开始工作,居民被告知感恩节前会恢复供暖,但承包商消失了,RGN 也没有答案或无法联系到他们,Fomalont 说。当她在感恩节周末拨打 RGN 的紧急热线时,她被告知要在 12 月 2 日星期一拨打。当她拨打电话时,她被告知 RGN 正在寻找更便宜的承包商。新管理层 12 月 10 日,另一根管道破裂,导致整个房产停热。RGN 于 12 月 13 日通知居民,维修可能至少需要两周时间,并劝阻他们不要
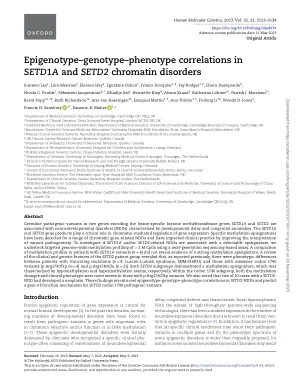
表观型 - 基因型 - setD1a和setD2染色质疾病中的相关性
种系病原变异在编码赖氨酸特异性组蛋白甲基转移酶基因setD1a和setD2的两个基因中与神经发育障碍(NDDS)相关,这些神经发育障碍(NDDS)具有发育延迟和先天异常的特征。setD1a和setD2基因产物在染色质介导的基因表达调节中起关键作用。已经检测到一系列染色质基因相关NDD的特异性甲基化发作,并通过改善变异致病性的解释来影响临床实践。为了研究SETD1A和/或SETD2相关的NDD是否与可检测的发作相关,我们使用基于下一代测序的测定法进行了> 2 M CpG的靶向全基因组甲基化分析。比较setD1a变异患者(n = 6)患者甲基化谱的比较没有揭示出强烈的甲基化发作的证据。对SETD2患者组的临床和遗传特征的综述表明,如前所述,截断突变的患者(n = 4,卢斯坎·卢姆综合症; MIM:616831)和具有MISSense CODON 1740的coDON 1740变体[P.Arg1740trp(n = 4 = 4)和P.Argn和P.Argn = 2 grn = arg n = arg n = arg n = arg n = arg n = arg n = arg n = arg 1 grn = 2 grn = rgn = rgn = rgn = rgn = 2 gln = rgn = rgn = rgn = rg1,两个SETD2亚组都表现出甲基化发作,该发作分别以甲基化和高甲基化事件为特征。在密码子1740亚组中,甲基化变化和临床表型在患有P.ARG1740TRP变体的人群中都更为严重。我们还注意到,具有SETD2 -NDD的10例病例中有2例发生了肿瘤。这些发现揭示了SetD2-NDDS中新型的表观遗传型 - 基因型 - 表型相关性,并预测了SETD2密码子1740致病变体的功能获取机制。
2022 年 10 月 12 日 编者注 国庆节......
共和国总统在 7 月 13 日对武装部队的讲话中展示了对预备役和青年的新抱负,RGN 将成为综合和反思的一天,其形式是与青年 IHEDN 合作建立的互动会议。此次活动包括三场圆桌会议,将从具体和前瞻性两个角度审视各地区预备役军人的承诺。特别是,它将解释预备役人员如何在恢复力和国家凝聚力中发挥作用,以及他们如何为增强国家的道德力量做出贡献。

通过腺病毒载体转移优化的 CRISPR-Cas9 成分整合基因传递和基因编辑技术
摘要 增强 RNA 引导的 CRISPR-Cas9 核酸酶 (RGN) 的细胞内递送和性能仍然有需求。在这里,我们表明常用的化脓性链球菌 Cas9 (SpCas9) 蛋白的核转位并不理想。因此,我们通过为高特异性 eSpCas9(1.1) 核酸酶 (eCas9.2NLS) 赋予额外的核定位信号 (NLS) 来生成 eCas9.4NLS。我们证明与原型或优化的引导 RNA 偶联的 eCas9.4NLS 可实现有效的靶向 DNA 切割,并探究具有不同 NLS 组成的 SpCas9 蛋白在异染色质和真染色质中嵌入的靶序列上的性能。此外,在腺病毒载体 (AdV) 介导的 SpCas9 表达单元转移后,无偏定量免疫荧光显微镜显示 eCas9.4NLS 核富集水平比高特异性 eCas9.2NLS 的核富集水平高 2.3 倍。这种改进的核易位反过来在非同源末端连接修复靶向双链 DNA 断裂后产生了强大的基因编辑。具体而言,AdV 将 eCas9.4NLS 递送到肌肉祖细胞中,导致有缺陷的 DMD 等位基因(导致杜氏肌营养不良症 (DMD))的编辑频率明显高于编码亲本 eCas9.2NLS 蛋白的 AdV 所实现的编辑频率。总之,这项工作为整合病毒载体和优化的基因编辑技术以增强 RGN 递送和性能提供了强有力的理论基础。