XiaoMi-AI文件搜索系统
World File Search SystemRIM

用于智能手表应用的金属边缘连接电感耦合器
摘要:针对智能手表应用,提出了一种采用串联无补偿拓扑结构的金属圈连接电感耦合器。通过将接收线圈通过1 mm 槽交叉连接到金属圈,金属圈上感应电流的方向转换为与接收线圈上流动的电流方向相同,从而导致发射线圈和接收线圈之间形成强磁耦合。考虑到智能手表内部的空间限制,智能手表内部需要无补偿元件,发射端仅集成一个串联电容。建立了所提电感耦合器样机,并通过实验验证了通过金属圈的无线电能传输。实验结果表明,样机实现了5 W的输出功率,线圈间效率为87.4%。

重新发明轮子?“FelGAN” 启发 AI 打造全新轮辋设计
2021 年,奥迪集团向客户交付了约 168.1 万辆奥迪品牌汽车、8,405 辆兰博基尼品牌跑车和 59,447 辆杜卡迪品牌摩托车。2021 财年,奥迪股份公司实现总收入 531 亿欧元,扣除特殊项目前的营业利润为 55 亿欧元。奥迪集团在全球拥有 89,000 多名员工,其中约 58,000 人在德国工作。凭借其极具吸引力的品牌、新车型、创新的移动出行产品和开创性的服务,该集团正在系统地朝着成为可持续、个性化、高端移动出行提供商的目标迈进。

第十九届环太平洋国际人工智能会议(PRICAI 2022)
重要日期(暂定) 环太平洋国际人工智能会议 (PRICAI) 是两年一度的国际盛会,主要关注人工智能理论、技术及其在对环太平洋国家具有社会和经济重要性的领域的应用。以往,会议曾在名古屋(1990 年)、首尔(1992 年)、北京(1994 年)、凯恩斯(1996 年)、新加坡(1998 年)、墨尔本(2000 年)、东京(2002 年)、奥克兰(2004 年)、桂林(2006 年)、河内(2008 年)、大邱(2010 年)、古晋(2012 年)、黄金海岸(2014 年)、普吉岛(2016 年)、南京(2018 年)、斐济(2019 年)、横滨(2020 年,线上)和河内(2021 年,线上)举行。第 19 届 PRICAI (2022) 将在中国上海以线下和线上相结合的方式举办。会议委员会诚邀提交人工智能各个方面大量、原创和未发表研究的技术论文。PRICAI-2022 旨在将人工智能和相关社区的研究人员、从业者、教育工作者和用户聚集在一起,进行深入的智力交流、研究合作和专业发展。会议关注的领域包括但不限于:
第 12 和 13 届国防部长非正式会议(RIM)......
布雷斯特是菲尼斯泰尔省的首府,拥有著名的港口,是世界上最大、最美丽的港口之一,经常举办古老帆船的聚会。丰富的航海历史与其城市和航海遗产相结合,使布雷斯特具有布列塔尼独一无二的活力和文化底蕴。城市的缆车可欣赏到海洋全景,并可通往卡普辛高原和卡普辛工作室,这是一个生活、文化和创新的场所,取代了以前的国家海洋工作室。同样值得参观的是位于布雷斯特中世纪城堡内的国家海事博物馆,以及致力于海洋的国家科学文化中心——Océanopolis。寻找这座城市的必游景点。
数字卫生交付的共同核心(范围 V1)
(1)通过IT媒体或电子传输。 (2)上游集成阶段:在将组件“密封”到要交付的组件中之前,可以轻松对其进行分析的时刻。 (3)交付阶段:测试、验收、交付、更新、MCO 等。(4)进行检查的集成和交付过程。

脊髓萎缩和脑顺磁性边缘病变与多发性硬化症患者病情进展的相关性与复发活动无关
亚历山德罗·卡戈尔(Alessandro Cagol),医学博士,帕斯卡·本克特(Pascal Benkert) MD的Ernst-Wilhelm Radue,MD,Johanna Oechtering,MD,Johannes Lorscheider,MD,Marcus d'Souza,MD ,医学博士,博士,医学博士Oliver Findling,医学博士Andrew Chan,Anke Salmen,MD,Caroline Pot,MD,PhD,Claire Bridel,MD,Chiara Zecca,MD,MD, Tobias Derfuss 医学博士、Johanna M. Lieb 医学博士、Luca Remonda 医学博士、Franca Wagner 医学博士、Maria Isabel Vargas 医学博士、Renaud A. Du Pasquier 医学博士、Patrice H. Lalive 医学博士、Emanuele Pravat`a 医学博士、Johannes Weber 医学博士、Philippe C. Cattin 博士、Martina Absinta 医学博士、博士、Claudio Gobbi 医学博士、David Leppert 医学博士、Ludwig Kappos 医学博士、Jens Kuhle 医学博士、博士以及 Cristina Granziera 医学博士、博士

人工智能视角下的研究信息
摘要 本文介绍了用于寻找适用于研究信息的 AI 技术的多学科和跨学科方法。专业研究信息管理 (RIM) 作为一种明确的数据驱动工具,正变得越来越重要。它不仅是科学知识过程的基础,而且与其他数据相关。本文介绍了从项目开始到 RIM 中 AI 方法的持续运行的基本阶段的概念和过程模型,描述了 AI 项目的实施,旨在使大学和研究机构能够支持其研究人员处理存储在 RIM 中的不正确和不完整的研究信息。我们的目的是展示研究信息如何与与 AI 相关的数据素养和数据质量问题的挑战相协调,同时也想强调,如果参与的研究机构和大学的各个部门共同努力并提供适当的支持以改进研究信息和数据管理,任何项目都可以成功。

距离成像计量:调查、校准和...
近年来,已经出现了许多用于捕捉三维环境和物体的传感器系统。除了激光扫描仪和大地测量全站仪外,这里还必须列举立体视觉和基于三角测量的系统。特别是激光扫描仪在速度和准确性方面已成为最先进的技术,能够捕捉数十米大小的物体。激光扫描仪的主要缺点是它们的顺序操作模式。它们逐点测量。几年前,开发了一种功能齐全的新技术,能够同时以高分辨率捕捉环境。所谓的范围成像 (RIM) 或闪光激光雷达相机基于数字成像技术,并具有测量每个像素中相应物体点距离的能力。距离测量基于直接或间接飞行时间原理。由于其并行采集高达视频帧速率,RIM 相机甚至可以捕捉移动物体。就光学依赖性而言,可以得出所捕获场景的 3-D 坐标。距离测量的标称精度为几毫米。如果属性和特性变得稳定且可预测,RIM 可能成为许多应用的首选技术。例如,汽车、机器人和安全系统。标称坐标和测量坐标之间的显著偏差发生在几厘米的范围内。只有深入的研究才能帮助达到这里的理论极限。本论文讨论了影响 RIM 相机测量的几个方面。首先,简要介绍与 RIM 相关的基本技术。除了成像和距离测量方法外,RIM 还区分了两个基本原理。此外,重点放在特定的限制上。在这项工作期间,有三种不同的相机问世:瑞士 CSEM / MESA Imaging 的 SwissRanger SR-2 和 SR-3000,以及后来德国 PMDtec 的 3k-S。这三款相机基于间接飞行时间原理,配备了不同的复杂功能。除了集成的校准和校正功能外,抑制背景照明也是主要功能之一。但是,这些相机仅用于高度发达的演示。根据所需权利要求,对特定应用领域(如汽车或机器人)的适应性可产生专门的属性。对现有相机类型的分析有助于更深入地了解该技术。所分析相机的原始数据精度不超过几厘米。为了研究现有相机的属性,必须开发特殊的实验装置。这项工作的主要部分涉及 RIM 相机组件的研究和校准。通过摄影测量相机校准解决光学系统的几何偏差。根据偏差和统计数据分析距离测量系统。因此,指出了精度和准确度的局限性。除了散射效应的影响外,还讨论了积分时间、发射系统和入射角、目标反射率、外部和内部温度以及最终的线性度和固定模式噪声。此外,还介绍了一种系统校准过程的方法。由于影响参数的复杂性,尚未对各种影响参数的测量数据进行完整的校正。但高度系统的依赖关系预示着未来会出现复杂的校准程序。这项工作有助于理解传感器。
XiaoFeng Wang
• Paper reviewer for the IEEE/ACM Transactions on Networking, the ACM Transactions on Information and System Security, the IEEE Transactions on Dependable and Secure Computing, the IEEE Transactions on Parallel and Distributed Systems, International Journal of Knowledge and Information Systems, the IEEE transactions on Knowledge and Data Engineering, Electronic Commerce Research Journal, ACM Conference on Computer and Communication Security, RSA CT, IEEE INFOCOM, IEEE Globecom,ACM国际信息安全会议,有关增强隐私技术的研讨会,网络安全与加密会议,IEEE国际通信国际通信会议,Pacific RIM Multiagent Systems,Pacific RIM国际人工智能国际会议和IFIP世界计算机代表大会。
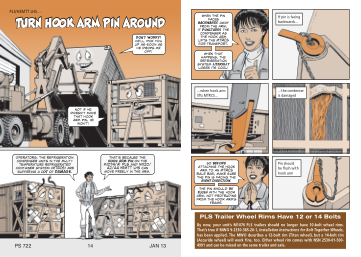
PLS/HEMTT LHS...
到目前为止,您单位的 M1076 PLS 拖车应该不再有 10 螺栓轮辋。如果已应用 MWO 9-2330-385-20-1(螺栓连接车轮安装说明),则情况确实如此。MWO 描述了 12 螺栓轮辋(Titan 车轮),但 14 螺栓轮辋(Accuride 车轮)也可以正常工作。任一轮辋都配有 NSN 2530-01-500-4991,可以混合安装在同一个拖车和车轴上。