XiaoMi-AI文件搜索系统
World File Search SystemROV

ROV深发现者
Rov Deep Discoverer(简称为“ D2”)可以在海面以下最多6,000米(19,685英尺),这意味着它几乎可以探索海洋中的任何地方,除了深沟。D2携带各种相机设备,采样工具和传感器,以收集潜水期间有关深海的尽可能多的信息。其主摄像头可以从3米(10英尺)远的三英寸长生物体放大,并倾斜以捕捉宽阔的视野,从而有助于查看从小生物到深海中大规模栖息地的所有事物。D2的实时视频从海底到船上旅行,然后通过卫星连接到位于岸上的科学家。他们使用实时视频为飞行员提供有关去向地点以及要收集哪些样本的指导。d2的多关节操纵臂非常灵活,使操作员具有操纵和收集生物学和地质样品的能力。飞行员还可以控制操纵器臂下颚的握力,从而使他们轻轻夹住脆弱的珊瑚样品或捡起沉重的岩石或矿物样品。直播ROV视频也被广播到互联网,使任何人都可以参加D2的冒险经历。
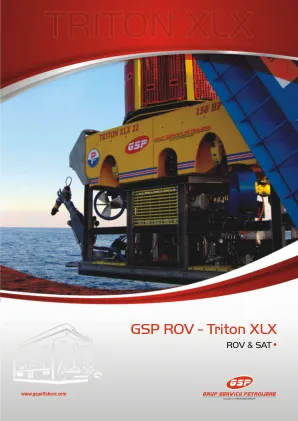
GSP ROV - Triton XLX
陀螺仪/磁通门 罗盘 俯仰/横滚传感器 Digiquartz 深度多普勒 速度计-ROV DP 自动功能(航向/深度/高度/位置) 16 站比例 NG3 主歧管 14 站比例推进器歧管-6 个备用功能 12 站比例工具歧管 500 瓦灯带调光电路可用 (6) 电路 x / 2 x 250 瓦灯每个标准 (6) 操纵器 左 – 5 功能 – Schilling Rigmaster 右 – 7 功能 – Schilling Titan T4 声纳
ROV 手册:观察级用户指南...
1970 年,当我重返大学,成为一名机械工程师时,我从未听说过 ROV 这个词。我所知道的唯一的遥控机器人基本上是绕地球运行的卫星。随着 20 世纪 70 年代初航天工业的崩溃,我的注意力转向了下一个前沿领域 — — 海洋。1973 年,我被海军水下中心招募,主要是因为那里正在开发的那些有趣的水下机器人(如 CURV III(电缆控制水下回收机器人))的吸引力。我被迷住了!我的兴趣越来越浓,技术也越来越先进,几家 ROV 公司也应运而生。这个蓬勃发展的行业,尤其是在我家乡圣地亚哥附近,促成了第一个遥控机器人会议 ROV '83 的成立,我担任了会议主席。“一种时代已经到来的技术”这一主题恰逢其时,并帮助发起了以“水下干预”为主题的系列会议,该系列会议至今仍在继续。该系列会议的首批产品之一是《ROV 操作指南》,这是海洋技术协会 (MTS) 的 ROV 委员会的开创性出版物。我很高兴与 Frank Busby 和一个专家委员会一起制作了这本书,他们也帮助启动了 ROV 系列会议。还制作了一些其他专门的出版物来介绍 ROV 的使用和维护,但没有一个涵盖早期指南的范围。MTS ROV 委员会要求我更新指南,我和负责制作的 Jack Jaeger 一起承担了这项任务。最终成果——《无人水下系统的作战效能》——涵盖了 ROV 的整个范围,从历史、设计和操作,到展望未来。这本 700 多页的书于 1999 年以 CD-ROM 形式出版,为水下航行器文献树立了另一个里程碑。感谢所有为本书提供素材的人。2005 年,我从圣地亚哥海军实验室退休,决定开始我的下一个职业生涯,担任水下系统顾问,不仅撰写技术出版物,还撰写小说。我的第一部小说《第二次日出》获奖,续集将于 2007 年出版。希望这将成为一系列海底科技惊悚小说的开端,这些小说不仅能娱乐读者,还能教育读者。现在,我们来谈谈这个出版物——ROV 手册。我再次被联系来审查并批评 Robert Christ 撰写的原始手稿。我知道准备这样一本书需要付出多少努力,因此我对这本看似优秀的出版物发表了自己的看法,该出版物针对的是专门观察类的 ROV。长话短说,我们同意共同编写手册并推动其完成,这让我们的出版商非常高兴。
ROV 手册:观察级用户指南...
1970 年,当我重返大学,成为一名机械工程师时,我从未听说过 ROV 这个词。我所知道的唯一的遥控机器人基本上是绕地球运行的卫星。随着 20 世纪 70 年代初航天工业的崩溃,我的注意力转向了下一个前沿领域——海洋。1973 年,我被海军水下中心招募,主要是因为那里正在开发的那些有趣的水下机器人(如 CURV III(电缆控制水下回收机器人))的吸引力。我被迷住了!我的兴趣越来越浓,技术也越来越先进,几家 ROV 公司也应运而生。这个蓬勃发展的行业,尤其是在我家乡圣地亚哥附近,促成了第一个遥控机器人会议 ROV '83 的成立,我担任了会议主席。“一项时代已到的技术”这一主题恰逢其时,并帮助发起了以“水下干预”为主题的系列会议,该系列会议至今仍在继续。该系列会议的首批产品之一是《ROV 操作指南》,这是海洋技术协会 (MTS) 的 ROV 委员会的开创性出版物。我很高兴与 Frank Busby 和一个专家委员会一起制作了这本书,他们也帮助启动了 ROV 系列会议。还制作了一些其他专门的出版物来介绍 ROV 的使用和维护,但没有一个涵盖早期指南的范围。MTS ROV 委员会要求我更新指南,我和负责制作的 Jack Jaeger 一起承担了这项任务。最终成果《无人水下系统的作战效能》涵盖了 ROV 的整个范围,从历史、设计和操作,到展望未来。这本 700 多页的书于 1999 年以 CD-ROM 形式出版,为水下航行器文献树立了另一个里程碑。感谢所有为本书提供素材的人。2005 年,我从圣地亚哥海军实验室退休,决定开始我的下一个职业生涯,担任水下系统顾问,不仅撰写技术出版物,还撰写小说。我的第一部小说《第二次日出》获奖,续集将于 2007 年出版。希望这将成为一系列海底科技惊悚小说的开端,这些小说不仅能娱乐读者,还能教育读者。现在,我们来谈谈这个出版物——ROV 手册。我再次被联系来审查并批评 Robert Christ 撰写的原始手稿。我知道准备这样一本书需要付出多少努力,因此我对这本看似优秀的出版物发表了自己的看法,该出版物针对的是专门观察类的 ROV。长话短说,我们同意共同编写手册并推动其完成,这让我们的出版商非常高兴。


探索未来 ROV 的生态界面设计
摘要。未来的海上指挥团队将处理更多的数据,这一趋势是由持续的技术进步和新传感器推动的。遥控机器人 (ROV) 正在为此做出贡献,因为它们在民用和军事环境中的使用正在稳步增长。一个关键挑战是有效地将不断增长的数据量集成到指挥团队中,确保以最佳性能完成可能需要的各种任务。特别是,不应超出操作员的认知能力,因为这可能会对全球团队绩效产生负面影响。对 ROV 使用情况的审查表明,它们主要用于了解和与环境互动。生态界面设计 (EID) 旨在使系统约束显而易见并减少操作员的工作量。由于 EID 的目标与 ROV 操作具有协同作用,因此假设如果实施遵循这些设计原则的界面,操作员的工作量可能会减少。在当前工作中,EID 被提议作为 ROV UI 的设计范例,以促进未来的最佳性能。
探索未来 ROV 的生态界面设计...
摘要。未来的海上指挥团队将处理更多数据,这一趋势由持续的技术进步和新传感器推动。遥控机器人 (ROV) 正在为此做出贡献,因为它们在民用和军事环境中的使用正在稳步增长。一个关键挑战是将不断增长的数据量有效地集成到指挥团队中,确保以最佳性能完成可能需要的各种任务。特别是,不应超出操作员的认知能力,因为这可能会对全球团队绩效产生负面影响。对 ROV 使用情况的审查表明,它们主要用于了解和与环境交互。生态界面设计 (EID) 旨在使系统约束显而易见并减少操作员的工作量。由于 EID 的目标与 ROV 操作具有协同作用,因此假设如果实施遵循这些设计原则的界面,操作员的工作量可能会减少。在当前工作中,EID 被提议作为 ROV UI 的设计范例,以促进未来的最佳性能。
太阳能 ROV:利用可再生能源推进水下探索。
摘要 — 考虑到遥控机器人 (ROV) 在进行检查、数据收集和海底探索方面的重要性,本文提出了一种太阳能 ROV 解决方案。太阳能用于为 ROV/AUV 供电,经过适当设计的太阳能电池板可为 Blue ROV 提供 5 小时的性能。正在考虑使用小型 10Hp/12kg ROV 进行水下活动,其能量需求负载为 943.68W。为了满足这一需求,太阳能电池板安装在浮动平台上以产生必要的电力,并通过细致的计算确定太阳能模块的最佳数量和尺寸。为了确保连续运行,逆变器、充电控制器和电池组的尺寸也应相应调整。所提出的模型使用 COMSOL Multiphysics 环境优化了硅太阳能电池。COMSOL Multiphysics 中的模拟根据设计参数验证了结果,确认结果符合计算值。使用太阳能系统可提高运营效率,同时确保海上活动的长期可持续性。太阳能 ROV 代表着利用可再生能源在几内亚湾和其他地区进行环保、高效的水下勘探迈出了重要一步。
私人拥有摩托车、越野车、全地形车和 ROV 政策
2024 年 3 月 22 日 — 无论是在岗位上还是岗位外骑行,无论是在执勤期间还是下班后,我恳请您帮助我们让斯图尔特堡和亨特军队的骑行更加安全……