XiaoMi-AI文件搜索系统
World File Search SystemRacing
小规模自动赛车 - 以色列查尔斯
●概述:Indy Autonomous挑战是一项全球竞赛,大学团队设计自动赛车以在全面赛车赛道上竞争[1]。●关键技术:自动驾驶依赖于高端传感器,例如光检测和射程(LIDAR),无线电检测和射程(雷达)和摄像机。自主驾驶还依靠深度学习来实时感知,以及针对高速操纵而优化的控制系统。●相关性:尽管全尺寸,但该项目展示了自动驾驶汽车赛车的尖端,包括使用实时人工智能(AI)和在高速条件下控制。Indy Autonomous挑战的一些竞争对手最初是从小型赛车自动驾驶汽车开始的。因此,我们认为那里使用的技术可以缩减到我们的项目。


冬季观察:没有 ITV 赛车,总体而言没有灾难
作者:亚当·霍顿 自上周五以来,英国的全天候赛事一直很热闹,只有周日在切普斯托举行的两场比赛例外。由于极端天气条件袭击了英国部分地区,那场比赛成为了国家狩猎活动取消的越来越多比赛的名单之一。我们的心与所有受影响最严重的人同在,包括沃顿庄园养马场的团队,他们在 X 频道发布了一段视频,显示诺丁汉郡农场至少两个围场被几英尺深的水完全吞没。值得庆幸的是,他们后来报告说,沃顿庄园的所有动物都没有受到伤害。我很想告诉你们,全天候赛事在过去几天里为我们带来了令人欣慰的消遣,但事实上,它一直比较低调。理想情况下,ITV Racing 可以这样安排,在桑当和温坎顿的原定比赛取消后,于周六播放南威尔和/或伍尔弗汉普顿的比赛,但之后再看看这些比赛的实际情况。续 p3

工程演示节项目 - 线追随者赛车比赛
○尺寸约束:一开始,机器人必须适合20厘米x 20 cm的足迹。他们可以在操作过程中略微扩展,但必须保持紧凑才能导航轨道。○重量限制:每个机器人的最大允许重量为3千克,包括所有组件。○自治:比赛开始后必须完全自主,不允许外部控制或调整。○组件限制:鼓励团队使用提供的Arduino套件和传感器。虽然允许其他组件,但团队必须在这些部分的分配预算之内。自定义零件(例如,3D打印的安装座)是允许的,但必须安全且安全。○安全要求:不允许尖锐的边缘,裸露的电路元素或潜在的危险材料。所有组件都必须牢固地固定,以防止比赛期间松动或布线。●尝试和轨道方案的规则
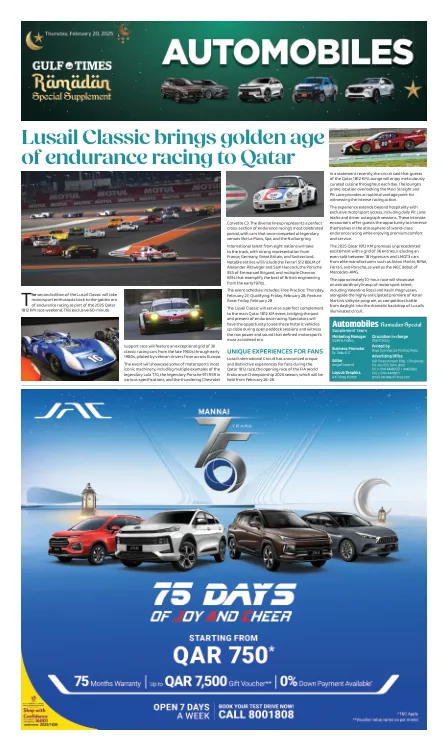
Lusail Classic将耐力的黄金时代赛车带到卡塔尔
先进的声学环境至高无上的机舱是高质量的车载音频的必不可少的背景。CX-60的刚体结构有助于实现这一目标,通过广泛的声音绝缘和NVH措施来抑制不必要的噪声和振动。以此为基础,独特的马自达语音声学音频计划为车辆中的每个人都创造了令人叹为观止的音频体验。和Master Sound Revive Revive Revive Revive降低(MSR NR)在汽车音频系统中首次亮相,可以通过大大降低低级噪音来实现名称所说的话,该声音可以使您更加接近艺术家的意图,从而使您的高质量音频体验带来高质量的音频体验。总的来说,CX-60无论坐在哪里,CX-60都会为每个人提供前所未有的聆听乐趣。

一种非线性模型预测控制策略,用于秤车的自主赛车
摘要 - 本文介绍了旨在控制用于自主赛车竞赛的小型汽车模型的非线性模型预测控制(NMPC)策略。拟议的控制策略涉及将车辆时间最小化,同时将车辆保持在轨道边界范围内。优化问题考虑了车辆的致动极限以及作用于Pacejka魔法公式和简单传动系统模型的汽车上的侧面和纵向力。此外,该方法允许在静态障碍物填充的轨道上安全地竞争,从而产生无冲突的轨迹并跟踪它们,同时增强膝盖正时性能。使用F1/10模拟器的凉亭模拟展示了拟议的控制策略的可行性和有效性。该代码作为开源释放,使得可以复制获得的结果。索引术语 - 非线性模型预测性控制,Au au sopos Racing,F1/10模拟器,自动驾驶汽车导航。

tinylidarnet:基于第2 f1th自主赛车的端到端深度学习模型
摘要 - 先前的研究证明了端到端深度学习对机器人导航的有效性,其中控制信号直接源自原始感觉数据。但是,大多数现有的端到端导航解决方案主要基于相机。在本文中,我们介绍了Tinylidarnet,这是一种基于自动赛车的基于轻量级的2D激光雷达的端到端深度学习模型。使用Tinylidarnet的第1辆汽车在第12场比赛中获得第三名,这表明了其竞争性能。我们会系统地分析其在未经训练的轨道和实时处理的计算要求上的性能。我们发现,基于Tinylidarnet的1D卷积Neu-ral网络(CNN)的体系结构显着胜过基于多层的多层感知器(MLP)体系结构。此外,我们表明它可以在低端微控制器单元(MCUS)上实时处理。

部分端到端强化学习,以抗鲁棒性,以防止建模自动赛车
摘要 - 在本文中,我们解决了在存在实用车辆建模错误(通常称为模型不匹配)的条件下导航时自动赛车的强化学习(RL)解决方案的性能(RL)解决方案的问题。为了应对这一挑战,我们提出了一种部分端到端算法,该算法可以解除计划和控制任务。在此框架内,RL代理会生成一个轨迹,该轨迹包括路径和速度,随后使用纯粹的追击转向控制器和优势速度控制器对其进行跟踪。相比之下,许多当前基于学习的基于学习的(即增强和模仿学习)算法使用了一种端到端方法,从而深层神经网络将传感器数据直接映射到控制命令。通过利用经典控制器的鲁棒性,我们的部分端到端驾驶算法比标准的端到端算法表现出更好的模型不匹配的鲁棒性。

通过Assetto Corsa
这项研究有助于洞悉增强学习(RL),SIM卡(ULATION)赛车和自主驾驶的交集,特别是在Assetto Corsa(AC)中作为SIM卡赛车环境。RL算法的差异是通过推理软性批判性(SAC)算法适用于AC中的Au car赛车剂的适用性的。基于此,提出了用于使用AC作为实验环境的系统设计,用于训练无模型的非政策外囊算法。在解决圈圈结算问题的背景下讨论了特定的政策细节,超参数和奖励因素。在这里,观点是找到一项通过给定汽车完成给定轨道的政策。为五个不同的奖励功能提供了结果,我们在该功能上结论了第五个(使用标题和中心错误)是最有效的。进行研究的未来步骤的目的是实际完成全圈,并最终还优化了最低时间问题。这里的目标不仅要完成,而且要以最少的时间结束。

劳雷尔公园可行性报告
当前所有权历史 总部位于加拿大安大略省奥罗拉的 Stronach 集团于 2002 年首次收购了马里兰赛马俱乐部的多数股权,并于 2007 年扩大了其权益。除了 Laurel 和 Pimlico,该集团还拥有多个纯种赛马场,包括圣塔安尼塔 (CA)、金门赛马场 (CA) 和 Gulfstream Park (FL)。Stronach 集团还经营这些赛道的同步转播场地以及 OTB(场外投注)设施。其他企业包括 Xpressbet,这是一家预付押金投注公司,允许客户通过互联网或电话对 100 多个赛马场下注。 2020 年,该集团将其赛马设施更名为 1/ST Racing。1/ST Racing 的首席执行官是 Craig Fravel,他曾担任 Breeders' Cup Limited 的总裁兼首席执行官,并曾担任 Del Mar 的总裁兼总经理。根据目前的公司结构,Laurel Racing Association Limited Partnership 拥有 Laurel Park 的不动产和其他资产。该协会由普通合伙人 Laurel Racing Association, Inc. 和有限合伙人 Maryland Racing, Inc. (MRI) 组成。MRI 通过其全资子公司 MJC Racing (2007) LLC 拥有该协会和 Pimlico Racing Association, Inc.(“Pimlico”)的 100% 投票权和股权。Stronach Group 通过其子公司 TSG Developments Investments, Inc.(母公司)最终拥有 MRI 的 100% 股权。该协会和 Pimlico 统称为马里兰赛马俱乐部。斯特罗纳克集团一直积极参与大会 2020 年通过的 SB 987 重建工作。