XiaoMi-AI文件搜索系统
World File Search SystemRealsense

kinova®Gen3-在机器人技术中一起
深度传感器(Intel®RealsenseTM)分辨率,帧速率(FPS),视场(FOV):最多480 x 270(16:9) @ @ @最高30 fps; FOV 72 +/- 3°(对角线)

经纱视觉-Kerem Yildirir
LIDAR和SLAM为我们提供了一个离线的全球地图,但是我们需要检测动态障碍,最重要的是行人,以及在录制全球地图时不存在的汽车,骑自行车的人和其他物体。基于Intel Realsense和Livox 100中激光雷达的实时图像,我们需要确定3D中障碍物的位置和类别。
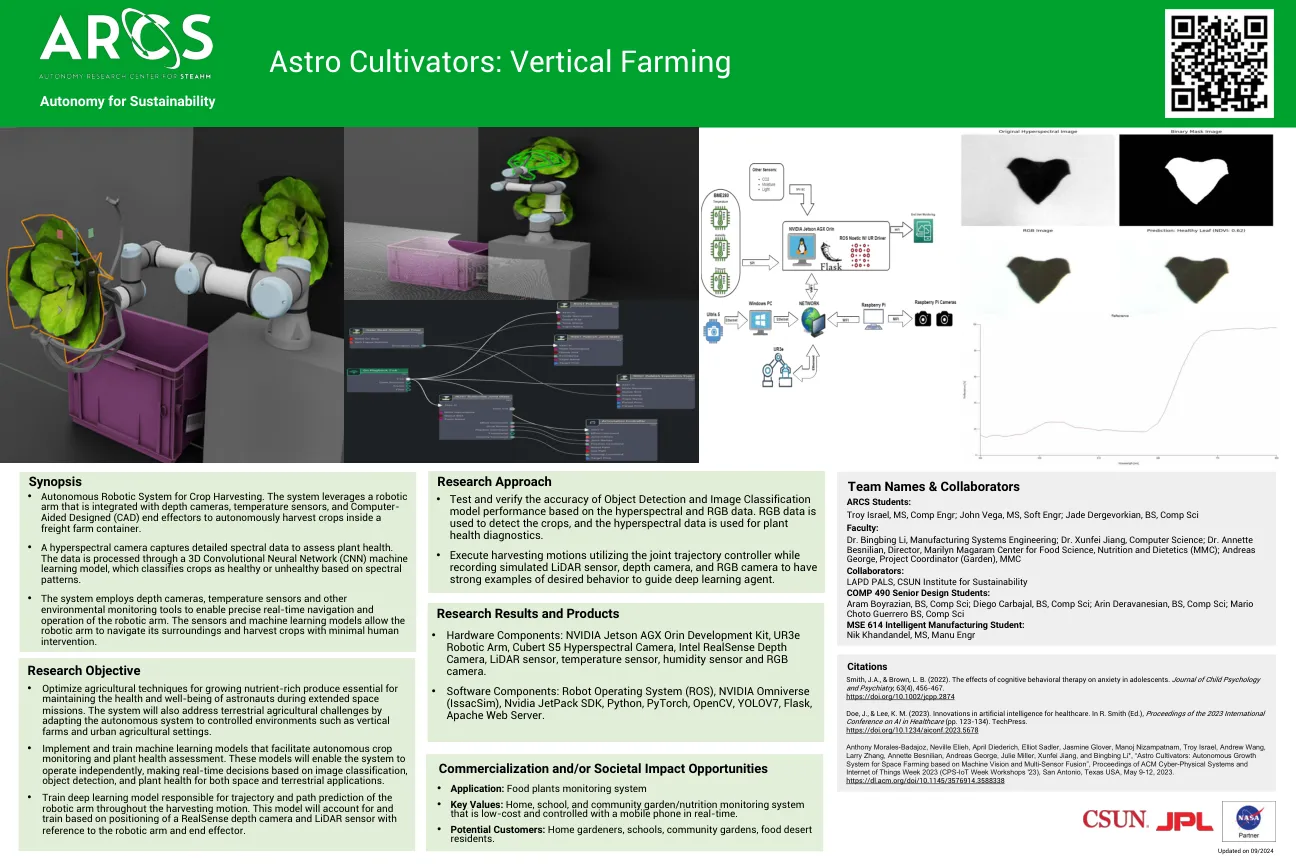
Astro耕种者:垂直农业
•优化农业技术,以生长富含养分的农产品对于在扩展太空任务期间维持宇航员的健康和福祉至关重要。该系统还将通过将自主系统调整为诸如垂直农场和城市农业环境之类的受控环境来解决地面农业挑战。•实施和训练机器学习模型,可促进自动作物监测和植物健康评估。这些模型将使系统能够独立运行,根据图像分类,对象检测和植物健康做出实时决策,以实现空间和陆地应用。•训练深度学习模型,负责在整个收获运动中对机器人组的轨迹和路径预测。该模型将根据机器人臂和最终效应器的定位来解释和训练。

深度学习的对象检测,智能轮椅医疗保健移动性的本地化和跟踪
摘要:本文介绍了智能电动轮椅的高级驾驶员援助系统(ADA)的开发,以提高残疾人的自主权。我们的用例基于正式的临床研究,基于轮椅室内环境中物体的检测,深度估计,定位和跟踪,即:门和门把手。这项工作的目的是为轮椅提供一个感知层,使以这种方式检测这些关键点在其直接周围的周围,并构建了短期寿命语义图。首先,我们将Yolov3对象检测算法的改编对我们的用例进行了改编。然后,我们使用Intel Realsense相机介绍我们的深度估计方法。最后,作为方法的第三步也是最后一步,我们根据排序算法介绍了3D对象跟踪方法。为了验证所有发展,我们在受控的室内环境中进行了不同的实验。使用我们自己的数据集对检测,距离估计和对象跟踪进行实验,其中包括门和门把手。
Acer Chromebook Plus 514产品表
在不断提高产品质量的努力中,本文档中的信息如有更改,恕不另行通知。显示的图像仅是该模型可用的某些配置的表示。可用性可能会因区域而异。作为薄膜晶体管(TFTS)已知的现象,液晶显示(LCD)通常显示出少量的变色点,称为所谓的“不合格像素”。这种现象是TFT LCD技术的限制,而不是产品缺陷,因此,Acer的保修不涵盖。©2023。All rights reserved Ultrabook, Celeron, Celeron Inside, Core Inside, Intel, Intel Logo, Intel Atom, Intel Atom Inside, Intel Core, Intel Inside, Intel Inside Logo, Intel vPro, Intel Evo, Itanium, Itanium Inside, Pentium, Pentium Inside, vPro Inside, Xeon, Xeon Phi, Xeon Inside, Intel Agilex,Arria, Cyclone, Movidius,Easic,Anpirion,Iris,Max,Intel Realsense,Stratix和Intel Optane是Intel Corporation或其子公司的商标。关于宏cer

保存的实验研究/ ... div>
在本文中,我们介绍了有关电动轮椅高级驾驶员援助系统的开发的工作。我们的项目旨在提高流动性降低的人的自主权。进行临床研究后,我们确定了几个用例。在本文中,我们在室内环境中介绍了椅子周围环境中兴趣点的检测,本地化和跟踪,即:门,手柄,照明开关等。目的不仅是为了提高椅子周围的看法,而且还可以使半自治的驾驶朝向这些目标。首先,我们将对象检测算法的Yolov3的重新应用于我们的用例。然后,我们显示了对Intel Realsense相机的使用,以进行深度估计。最后,我们描述了对跟踪3D兴趣点的排序算法的适应。为了验证我们的方法,我们在受控的室内环境中实现了一些实验。使用我们的自定义数据集测试了检测,距离估计和跟踪管道。这包括走廊,门,手柄和开关。研究的一个方案之一是为了验证所提出的平台,不仅包括对物体的检测和跟踪,还包括轮椅向其中一个感兴趣的一个点。

评估各种视觉系统以检测协作机器人应用中的人姿势
摘要:跟踪在协作机器人附近工作的人类操作员可以改善安全体系结构,人体工程学的设计以及在人与机器人协作场景中执行汇编任务。使用了三个商业空间计算套件及其软件开发套件,可提供各种实时功能来跟踪人类姿势。本文探讨了结合不同硬件系统和软件框架功能的可能性,这些功能可能会导致在协作机器人应用中检测人姿势的更好的性能和准确性。本研究在六个深度水平上评估了他们的性能,并比较了原始数据和降噪的过滤数据。此外,将激光测量设备用作地面真相指标,以及平均均方根误差作为误差度量。根据位置准确性和可重复性进行了分析并比较所获得的结果,表明传感器的性能在跟踪距离上的依赖性。使用基于卡尔曼的过滤器融合了人类骨架数据,然后考虑其在不同距离区域的性能,重建操作员的姿势。结果表明,在小于3 m的距离下,Microsoft Azure Kinect显示出更好的跟踪性能,其次是Intel Realsense D455和Stereolabs Zed2,而在范围高于3 m的范围内,ZED2的跟踪性能出色。

使用Yolov4和RGB-D
摘要。松散的棕榈果(LPF)是一种油棕果,已从其堆中成熟并掉落,含有高油脂含量。LPF的每个损失都会影响石油提取率并导致财务损失。现有的LPF收集方法不是很有效,因为它们需要人类的控制和监督。常规方法,例如机械和滚筒型LPF收集器,由于LPF散布在广泛的人工林上,因此效率低下。因此,必须使用自主LPF检测系统。但是,基于图像的检测系统通常受到诸如亮度和草的环境因素的干扰,而LPF位置随机器人和摄像头的位置而变化。这项研究的一般目标是开发一种基于图像的LPF检测算法。这需要基于深度学习的实时应用的有效检测算法。另外,使用图像深度(RGB-D)准确地确定LPF位置是必不可少的。该项目采用高效率和准确性的Yolov4对象检测器来实现实时LPF检测。使用深度图像和Intel Realsense D435i相机的视野,LPF位置是通过LPF边界框的中心坐标与相机之间的距离确定的。该系统已集成到机器人操作系统(ROS)中,以确保机器人的可用性。该系统达到了98.74%的平均准确性(MAP@IOU 0.5),平均损失为0.124,检测时间为5.14ms。对于LPF位置确定,算法的计算位置和手动测量之间的差异仅为X坐标的3.82厘米,而Y坐标的差异仅为1.80厘米。

基于机器学习和计算机视觉的牛品种识别和活重评估
本研究的目的是使用几种神经网络模型来估算奶牛的长重:卷积人工神经网络用于通过图片识别奶牛并确定其品种,随后通过立体视觉法确定其身体尺寸,随后利用多层感知器根据有关奶牛的品种和尺寸信息估算奶牛的长重。为了更准确地估计动物的身体参数,还使用了 3D 摄像头(Intel RealSense D435i)。应当注意,由于 3D 摄像头的分辨率低,单独使用不会产生良好的效果。因此,使用摄影测量法从不同角度拍摄的奶牛图像来确定奶牛身体参数。通过摄影测量获得了奶牛的肩高(WH)、臀高(HH)、体长(BL)和臀宽(HW)等参数。使用这些参数(输入参数 WH、HH、BL、HW 和输出参数 - LW),开发了基于 ANN 的模型估计。通过分析从不同角度同步摄像机拍摄的动物图像,可以确定奶牛的身体尺寸。首先,在图像中识别奶牛,并使用 Mask-rcnn 卷积神经网络确定其品种。然后通过立体视觉方法确定奶牛的肩高、臀高、身长和身宽,该方法可以获得数字图像中物体的几何参数并进行测量。数字成像和摄影测量处理包括几个完全确定的步骤,可以生成动物身体的三维或二维数字模型。然后将获得的有关物种及其大小的数据输入到预测模型,该模型确定动物的估计体重。

实时3D语义场景感知具有双眼视觉的自我中心机器人
摘要 - 在室内移动的同时,感知具有多个对象的三维(3D)场景对于基于视觉的移动配件至关重要,尤其是对于增强其操纵任务的尤其是。在这项工作中,我们为具有双眼视觉的自我中心机器人提供了实例分割,特征匹配和点集注册的端到端管道,并通过拟议的管道展示了机器人的抓地力。首先,我们为单视图3D语义场景分割设计了一个基于RGB图像的分割方法,并利用2D数据集中的常见对象类将3D点封装在对象实例的点云中,通过相应的深度映射。接下来,根据先前步骤中匹配的RGB图像中感兴趣的对象之间的匹配关键,提取了两个连续的点云的3D对应关系。此外,要意识到3D特征分布的空间变化,我们还根据使用内核密度估计(KDE)的估计分布(KDE)来称量每个3D点对,随后可以使稳健性具有较小的中心范围,同时求解点云之间的刚性转换。最后,我们在7-DOF双臂Baxter机器人上测试了我们提出的管道,并使用安装的Intel Realsense D435i RGB-D相机测试了我们的管道。结果表明我们的机器人可以在移动时分割感兴趣的对象,注册多个视图,并掌握目标对象。源代码可在https://github.com/mkhangg/semantic Scene感知上获得。