XiaoMi-AI文件搜索系统
World File Search SystemRein
Zacks 小型股研究
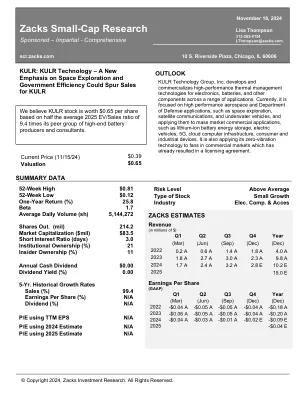
最新消息 新政府和 DOGE 可能为 KULR 提供机遇和挑战 市场对选举和未来潜在变化的反应喜忧参半,这涉及到电动汽车电池、绿色能源和太空领域。新政府的主要目标是控制行政状态并削减开支和法规以刺激经济和增长。这些行动可能在某些方面对 KULR 有帮助,但在其他方面会损害它。削减开支的一种方法是废除或修改相互矛盾的《通货膨胀削减法案》,这可能会取消对电动汽车的补贴并损害 KUHL 的电动汽车客户。它还可能取消对电池研究的补助。另一方面,削减法规和繁文缛节以加速太空技术的发展和军队现代化可能会促进销售。DOGE 渴望省钱,而 KULR 的 Vibe 是一款具有巨大潜力的产品,几乎可以立即为军队带来投资回报。虽然现在预测可能采取哪些行动还为时过早,但随着机会的出现,KULR 的重点可能会转变。无论发生什么,该公司的主要驱动力——太空电池市场加速发展、军用电池改进以及 KULR 振动技术都占据着强势地位。它们都推动了现代化进程并为政府节省了资金。

FY24-LHHS-解释性材料.pdf
对于 2024 财政年度,委员会建议当年可自由支配的资金(即 302(b) 拨款)总额为 147,096,000,000 美元,总体计划资金(包括抵消和调整)总额为 195,999,840 美元。2024 财政年度的建议比 2023 财政年度颁布的水平减少了 60,271,000,000 美元。美国仍然深陷高通胀,许多经济学家认为,在新冠疫情期间和疫情后,政府大量投入支出加剧了通胀。该法案代表着朝着恢复财政责任迈出了明确的一步,同时确保维持对关键和高优先级职能的资金。委员会法案通过消除重复和无效项目、做出战略性资金优先选择以及继续控制本届政府施加的失控支出和监管负担,促进了有利于就业增长的财政环境。委员会在整个法案中优先考虑了关键的生物医学研究、生物防御、有针对性的教育和监督责任。委员会的建议反映了仅通过减少可自由支配的支出来实现赤字削减所固有的挑战。只有实现强制性储蓄,我们的联邦预算赤字和国家债务才能大幅减少。委员会的建议还包括良好的政府、支持生命和支持家庭的规定、限制联邦政府的过度干预以及控制监管机构。
OSIC - 门户网站 Gov.br
数据匿名化和假名化:确保用于训练和推理的数据充分匿名化或假名化,降低识别风险。通用数据保护法 (LGPD) 隐私保护 AI 技术:实施联邦 AI 和加密学习,允许在不直接共享个人数据的情况下训练模型。数据保护 – ANPD 和法规遵从性:遵守隐私法律和法规,例如通用数据保护法 (LGPD) 和国家数据保护局的标准 – ANPD 和欧洲通用数据保护条例 (GDPR),以确保数据收集和使用符合隐私标准。

Valentina Dragos、Bruce Forrester、Kellyn Rein。混合 AI 是否适合混合威胁?来自社交媒体分析的见解。2020 IEEE 第 23 届信息融合国际会议 (FUSION),2020 年 7 月,南非鲁斯滕堡 (Virtuel)。 pp.1-7, 10.23919/FUSION45008.2020.9190465. hal- 03212312
摘要 — 社交媒体为真正互联的世界创造了机会,改变了人们沟通、交换思想和组织虚拟社区的方式。了解在线行为和处理在线内容对于安全应用都具有战略重要性。然而,大量、嘈杂的数据和主题的快速变化带来了挑战,阻碍了分类模型的有效性和语义模型的相关性。本文对用于分析社交数据流的监督、非监督和语义驱动方法进行了比较分析。本文的目标是确定实证研究结果是否支持增强决策支持和模式识别应用。本文报告了使用各种方法来识别社交数据集合中隐藏模式的研究,其中文本高度非结构化,带有多种模态,并且可能具有不正确的时空标记。结论报告指出,在挖掘社交媒体数据时,机器学习模型和语义驱动方法的脱节使用存在一些弱点。索引词 — 社交网络、混合人工智能、国防和安全

全球经济展望——2023 年 6 月
继去年增长 3.1% 之后,全球经济将在 2023 年大幅放缓至 2.1%,同时货币政策将继续收紧以抑制高通胀,然后在 2024 年温和复苏至 2.4%。全球金融状况紧张和外部需求低迷预计将拖累新兴市场和发展中经济体 (EMDE) 的增长。许多国家的预测在预测期内已被下调,上调主要是由于 2023 年初的数据强于预期,但此后的下调抵消了这一影响。通胀一直持续存在,但预计随着需求减弱和大宗商品价格温和下降,通胀将逐渐下降,前提是长期通胀预期保持稳定。如果银行业压力更大,或者更持久的通胀压力促使货币政策收紧于预期,全球经济增长可能会弱于预期。短期内增长前景疲软和风险加剧加剧了长期潜在增长放缓,而疫情、俄罗斯入侵乌克兰和全球金融环境急剧收紧等多重冲击又加剧了这一趋势。这种艰难的环境凸显了众多政策挑战。最近的银行倒闭要求重新关注全球金融监管改革。全球合作对于加速清洁能源转型、减缓气候变化和为越来越多陷入债务困境的国家提供债务减免也是必不可少的。在国家层面,必须实施可靠的政策来抑制通胀并确保宏观经济和金融稳定,并进行改革,为强劲、可持续和包容的发展道路奠定基础。
年度报告2023
林博士被提升为副教授。Lisa Rein被提升为生物统计学家III。Bi Qing(Michelle)Teng被提升为生物统计学II。詹妮弗·沃德(Jennifer Ward)被提升为研究计划协调员III。drs。Kim和Martens去年获得了出色的研究生教育家奖。drs。Sparapani,Laud和Logan是2023年ISBA Biostats和Pharma Best Paper Award的获奖者,标题为“非参数故障时间:与Heteroskedastic Bayesian添加性回归树和低信息填omnibus dirichlet Process Mixtures”的赛事机器学习,发表在Biometrics中。Ulrich Kemmo tsafack获得了低音(生物制药应用统计研讨会)学生旅行奖,并介绍了用于整合多族和多学生数据的荟萃分析基因聚类算法的海报。彼得·张(Peter Zhang)在7月的全国MD-PHD学生会议上发布了一张海报。XI Fang获得了2023年韩国国际统计协会杰出学生纸奖,并获得了美国统计协会终身数据科学科的学生纸奖。我们从生物统计学和数据科学MA计划中庆祝了我们的第一批毕业生。Logan博士被选为MCW研究卓越研究协会的新成员。 lin和Ahn因其项目的标题为“ FastQdesign:基于现实的FASTQ基于SCRNA-SEQ研究设计问题”的项目获得了CTSI Pilot-Berd方法论创新奖。 Sparapani博士Logan博士被选为MCW研究卓越研究协会的新成员。lin和Ahn因其项目的标题为“ FastQdesign:基于现实的FASTQ基于SCRNA-SEQ研究设计问题”的项目获得了CTSI Pilot-Berd方法论创新奖。Sparapani博士Sparapani博士获得了AHW赠款,标题为“通过ECG通过Veritas软件和混合学习来自动化心肌梗塞诊断”。 Jin博士获得了AHW赠款,标题为“ 3D染色质结构在乳腺癌内分泌耐药性中的作用”。 Banerjee博士获得了综合的伤害中心赠款,标题为“在影响伤害环境中风险预测(SHARP)的随机等级制算法”。博士。

安全与防务 欧洲
经过长达 30 小时的谈判,戴维·卡梅伦从其他 27 个欧盟成员国的国家元首和政府首脑那里获得了公开的妥协,这使他能够在挽回面子的同时恳求英国留在欧盟。当他匆忙赶往伦敦参加内阁会议,宣布“英国脱欧公投”的日期时,欧盟官僚机构的首脑们惊慌失措,试图保持镇静。“重要的是大家都留在谈判桌上”,理事会主席唐纳德·图斯克 (Donald Tusk) 的意思是,仿佛敌对冲突各方已经走到一起,谨慎地达成停火协议。欧盟委员会主席让-克洛德·容克 (Jean-Claude Juncker) 尽情发挥他的讽刺口吻:“英国在欧盟一直享有一定的特殊地位。今天的协议再次强调了这一点。”然而,在戴维·卡梅伦的解读中,这项协议不仅仅是一项传统的延续,即允许英国和其他一些成员国为自己争取一些规则的例外。相反,它标志着一条红线,如果英国想继续留在欧盟,欧盟就不能逾越这条红线。“我们永远不会加入欧元区。我们永远不会成为欧元救援计划的一部分,永远不会成为免护照区、欧洲军队或欧洲超级大国的一部分”,卡梅伦在新闻发布会上明确表示。大多数英国公民似乎支持这一立场,不允许布鲁塞尔进一步破坏国家主权。6 月 23 日,他们现在将面临选择。他们是否认为布鲁塞尔达成的协议足够可靠,可以投票反对脱欧?还是他们担心这只不过是公投后继续推进一体化进程的一种策略?到目前为止,选民们似乎会听从首相和大多数英国企业的建议,回避“脱欧”的风险。然而,现在情况已不再如此
Belharra诊所配备了DA VinciX®手术机器人的最新一代和专用于
•Bayonne的Belharra诊所(64),RamsaySanté集团的建立,通过收购Da VinciX®手术机器人来增强其技术托盘。•该设备构成了清晰的自镜手术技术的明显改进,并允许减少侵入性干预措施,以减少住院持续时间和患者的术后疼痛。•该机器人目前用于泌尿外科癌症手术(肾脏,前列腺,膀胱)以及复杂的功能性手术,例如器官下降或pyelo-ure-ure-ure-urewnction综合征。到2025年,其使用将扩展到消化,胸腔,妇科和ENT手术。•作为巴斯克地区癌症管理的主要演员,贝哈拉诊所有前列腺课程。这是一条专门的途径,可为该地区的患者提供加速获得首次泌尿外科咨询,前列腺MRI和恰好针对的微型活检的途径。•ExactVU™是前列腺活检期间使用的微型超声靶向工具,允许非常精确的前列腺病变靶向,这要归功于MRI图像融合。•在Movember之际,贝尔哈拉诊所(Belharra Clinic)致力于预防男性癌症,为公众提高了意识。
经济报告
2021 年,菲律宾国内生产总值 (GDP) 增长 5.6%,标志着经济复苏的开始。尽管 4 月和 9 月出现了两次新冠疫情激增,但放松流动限制和加快疫苗接种计划步伐有助于促进经济活动,尤其是在制造业和贸易部门。外国直接投资流入量反弹,甚至超过预期。同样,劳动力市场状况有所改善,更多人参与劳动力并获得就业。然而,随着无薪家庭工人和兼职工人数量的增加,就业质量仍然是一个紧迫的挑战。此外,与疫情前相比,2021 年又有 390 万菲律宾人陷入贫困。这一年也以财政赤字和公共债务水平飙升而告终。随着疫苗覆盖率的提高以及消费者和企业信心的增强,2022 年的前景总体乐观,尽管逆风仍然存在。新冠变种的威胁和不断上升的通货膨胀似乎是最大的风险担忧。全球需求不断增长以及东欧地缘政治紧张局势推高了全球和国内油价。然而,政府较小的财政空间可能会限制其向公众提供大量救济的能力。预计货币当局将逐步取消刺激措施并提高政策利率以抑制通胀,但这可能会影响增长势头。与此同时,虽然全国大选可能会刺激支出,但与之相关的政治不确定性也对增长构成一定风险。实体部门菲律宾经济增长 5.6%,2021 年。实际增长率略高于调整后的 5.0% 至 5.5% 的目标区间。2021 年初,全年增长目标最初定为 6.5% 至 7.5%,但全年对预测进行了多次下调。第四季度的增长尤为强劲,在新冠每日感染人数下降以及圣诞假期前疫情相关限制放松的背景下,GDP 增长了 7.7%。在东盟五国经济体中,1 菲律宾经济增长在 2021 年仅次于新加坡,排名第二,政府预计 2022 年菲律宾经济增长将进一步加速。

中国在规范平台经济方面的巨大逆转
本文开发了研究中国法规的五元素快乐模型:监管过程是分层的,最高领导能力是适应性的,中国的监管机构是狭och的,公司很柔和,中国公众需要大喊大叫。通过关注中国在规范平台经济方面的巨大逆转,我表明中国政策波动源于等级结构,即权力集中在顶级领导者中,他们也遭受了慢性信息赤字。我特别强调了顶级领导力,科技公司的积极游说以及监管机构的官僚惯性,共同助长了中国在线平台的滞后。当危机笼罩时,顶级领导层迅速动员所有行政资源和宣传,以发起针对科技巨头的执法运动。但是,如果没有强大的司法监督,积极进取的代理干预措施会造成过度执行和行政虐待的风险。到目前为止,中国对其政策控制的重新定位已大大加强了其在各种方面的监管能力,包括金融,反托拉斯和数据法规。通过对平台治理进行更大的监督,政府增强了各种平台参与者在处理平台方面的议价能力。政府的重型方法还为推动技术公司的巨大杠杆作用,以优先开发尖端技术,并将其远离外国股票市场,从而减少对西方对技术和资本的依赖。尽管竞选活动的直接影响,但它是否会带来持久的变化尚待观察,尤其是鉴于科技公司的持续游说和监管捕获的风险。同时,动荡的政策摇摆本身产生了风险和不确定性,这反过来又可能导致家庭社会和金融稳定性。由于世界其他地区类似地面临有关如何控制大型技术的棘手问题,因此中国对平台法规的经验可能会提供一些涉及全球政策辩论的教训。尽管本文主要关注平台经济,但快乐的模型有望阐明中国及其他地区的其他监管治理领域的复杂性和动态。